姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
本記事にはアフィリエイト広告が含まれます。
前回は 1軸 姿勢制御モジュール SHISEIGYO-1のホイールにLEDをつけてバーサライタ動作させてみました。
姿勢制御モジュールのホイールはバランス状況によって正転・逆転及び回転スピードが変わるので、安定した画の表示は出来ませんでした。
ゲーミング 姿勢制御モジュール pic.twitter.com/2q7VMKPAAf
— HomeMadeGarbage (@H0meMadeGarbage) February 23, 2022
目次
スリップリング
前回はホイールにLEDと制御用のマイコン(Adafruit Trinket M0)と回転検出用フォトリフレクタを載せてワイヤレスチャージモジュールで無線電源給電しました。
ここでは画の表示にホイールを駆動するブラシレスモータのエンコーダ出力を使用したいと考えました。
エンコーダによる回転検出値でLEDの点灯パターンを制御すればホイールの正転・逆転及び回転スピードが変わっても表示する画に影響はありません。
しかし問題はどのようにエンコーダ出力値をLED制御に反映させるかです。
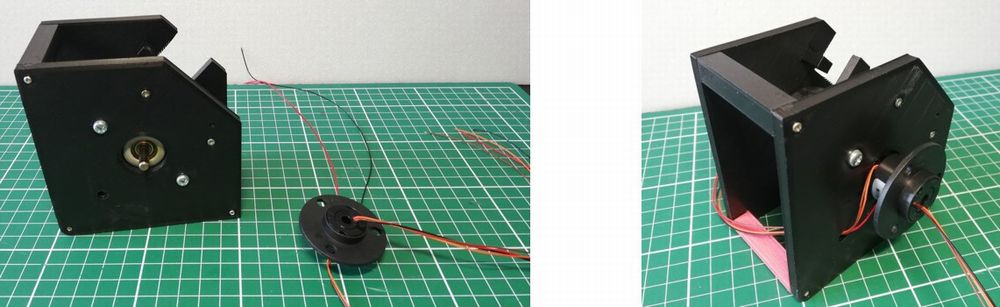
そこで遂にスリップリングに手を出してしまいました。

スリップリングは回転部に電源線や信号線を接続できるコネクタです。
スリップリング pic.twitter.com/svsdPMmMkw
— HomeMadeGarbage (@H0meMadeGarbage) March 10, 2022
ここでは4線のスリップリングを用いて回転部のSPI入力LEDと接続します。
SHISEIGYO-1 POV 構築
購入したスリップリングをSHISEIGYO-1のモータに通したかったのですが、シャフトが短く埋もれてしまいました。。
マウントハブと平行ピンでシャフトを延長してスリップリングとフライホイールを固定しました。
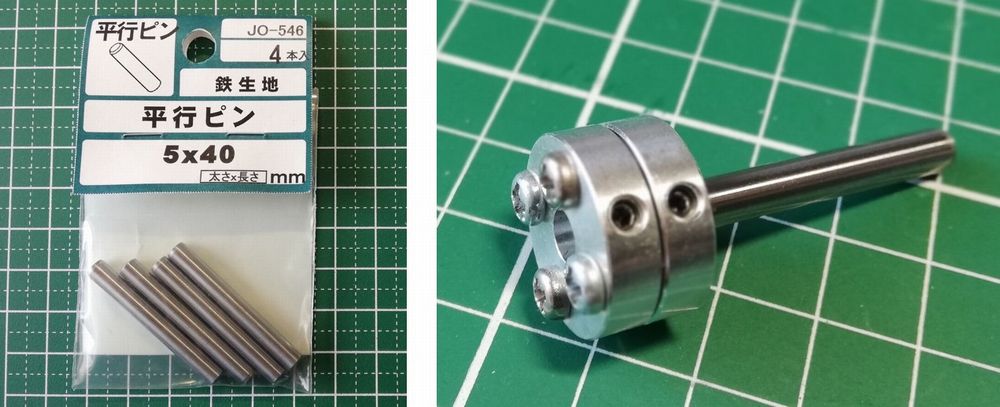
凄く仰々しくなってしまいました。。

完成
スリップリングの回転部用の配線に11セルのLEDを接続し、他方の配線をSHISEIGYO-1のコントローラであるATOM Matrixに接続します。
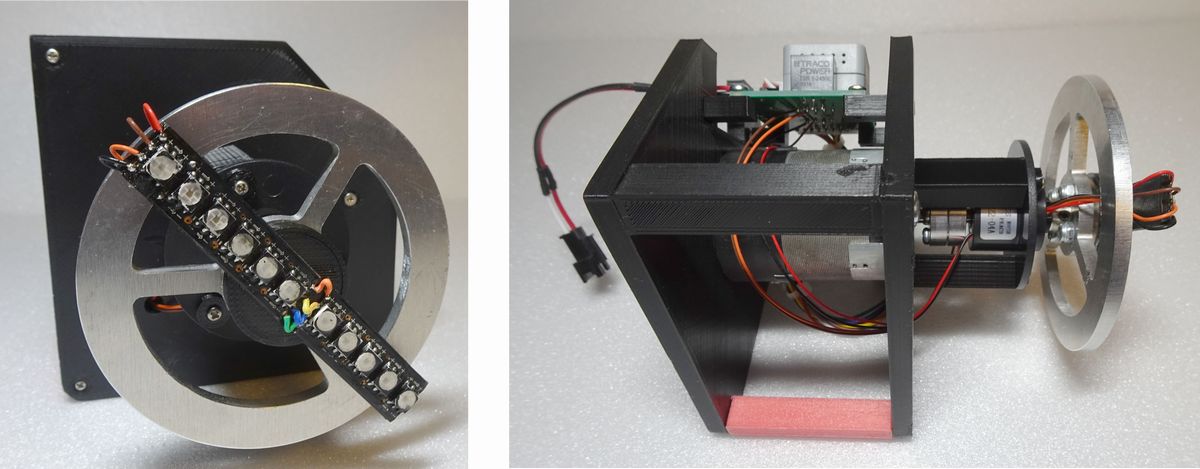
ATOM Matrix (デュアルコア) で姿勢制御しつつモータエンコーダ出力(1周100分解能)に基づいてSPI LEDを制御します。
ATOM Matrix Dual Core
Core0 : Dotstar
Core1 : NeoPixel + IMU pic.twitter.com/ZA9MYzikQq— HomeMadeGarbage (@H0meMadeGarbage) March 9, 2022
動作
まずはホイール1周を4分割して4色で発光
エンコーダで回転位置を検出してホイール速度や正転・逆転に依存しない表示を確認。
姿勢制御モジュール POVのスリップリング和え
モータのエンコーダでLED表示制御だから
回転スピード、回転方向に依存しない描画が可能にとりあえずRGBYで4分割#姿勢制御装置 #バーサライタ pic.twitter.com/TjLMCRwn4k
— HomeMadeGarbage (@H0meMadeGarbage) March 10, 2022
倒立動作も問題なく出来ています。
アニメーション表示
party parrot pic.twitter.com/FacOUmr29J
— HomeMadeGarbage (@H0meMadeGarbage) March 10, 2022
LEDのセル数が少なく回転速度も一定ではなくそれほど早くないので、きれいな表示は出来ていませんがスリップリングの使用によってかつてない表現が実現できました。
おわりに
ここでは初めてのスリップリング体験を堪能し、姿勢制御モジュールとPOVの融合による新たな表現を検証いたしました。
今後はスリップリングを用いたガチPOVの製作も検討したいなと考えております。
それではまた。
次の記事
関連記事
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
 SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
 SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 DCモータで点倒立 SHISEIGYO-2 DC ーリアクションホイールへの道52ー
DCモータで点倒立 SHISEIGYO-2 DC ーリアクションホイールへの道52ー
スリップリング,手を出しましたかw
高速回転できるもの(1000rpm程度)がなかなか手に入らないので大変です.何個か見つけているのですが,軍用が多く値段が上がってしまいますね.
私も手持ちの在庫のみで,もう底をつき始めています