
姿勢制御装置
7重倒立に挑戦3 ついに実現!! ーリアクションホイールへの道75ー
現在挑戦中の7重倒立 https://homemadegarbage.com/reactionwheel74// 前回は6重倒立まで確認しました。 7重倒立 6/7クリア pic.twitter.com/62W9bQGo8p — HomeMadeGarbage (...
電子工作 2025.1.28 お父ちゃん ![]()

7重倒立に挑戦2 ーリアクションホイールへの道74ー
前回に引き続き7重倒立に挑戦します。 https://homemadegarbage.com/reactionwheel73/ 前回は新規の7個目の姿勢制御モジュール (SHISEIGYO-1 FOC) を含む上段の6重倒立動作の確認を実施しました。 ここで...
電子工作 2025.1.27 お父ちゃん ![]()

7重倒立に挑戦1 ーリアクションホイールへの道73ー
もはや恒例行事の姿勢制御モジュールの多重倒立挑戦。 今年は7重倒立を目指します。 去年は6重倒立に挑戦しました。 https://homemadegarbage.com/reactionwheel64/ 7重倒立に向けての準備運動 7重倒立実現...
電子工作 2025.1.21 お父ちゃん ![]()

7重倒立に向けての準備運動2 ーリアクションホイールへの道72ー
前回は新規のSimpleFOCによるブラシレスモータ制御の1軸姿勢制御モジュールを製作して7重倒立実現に向けた検証を実施しました。 https://homemadegarbage.com/reactionwheel71/ 不安定ではありましたが新規モジュールを一番下にして上に3段追加した4重倒立...
電子工作 2024.11.19 お父ちゃん ![]()

SimpleFOCによるベクトル制御への誘い
前回はSimpleFOCで複数モータのI2Cマルチプレクサでの同一I2Cバスによるエンコーダ回転監視動作を確認しました。 https://homemadegarbage.com/simplefoc09/ 倒立振子や3軸姿勢制御モジュールで動作確認したのですがいずれも電流センスなしのクローズドルー...
7重倒立に向けての準備運動 ーリアクションホイールへの道71ー
最近はもっぱらSimpleFOCでブラシレスモータを回すことにハマっております。 色々なブラシレスモータで1軸姿勢制御モジュールも製作しました。 https://homemadegarbage.com/simplefoc07 強力なドローンモータを用いて多重倒立も実現できました...
電子工作 2024.10.12 お父ちゃん ![]()
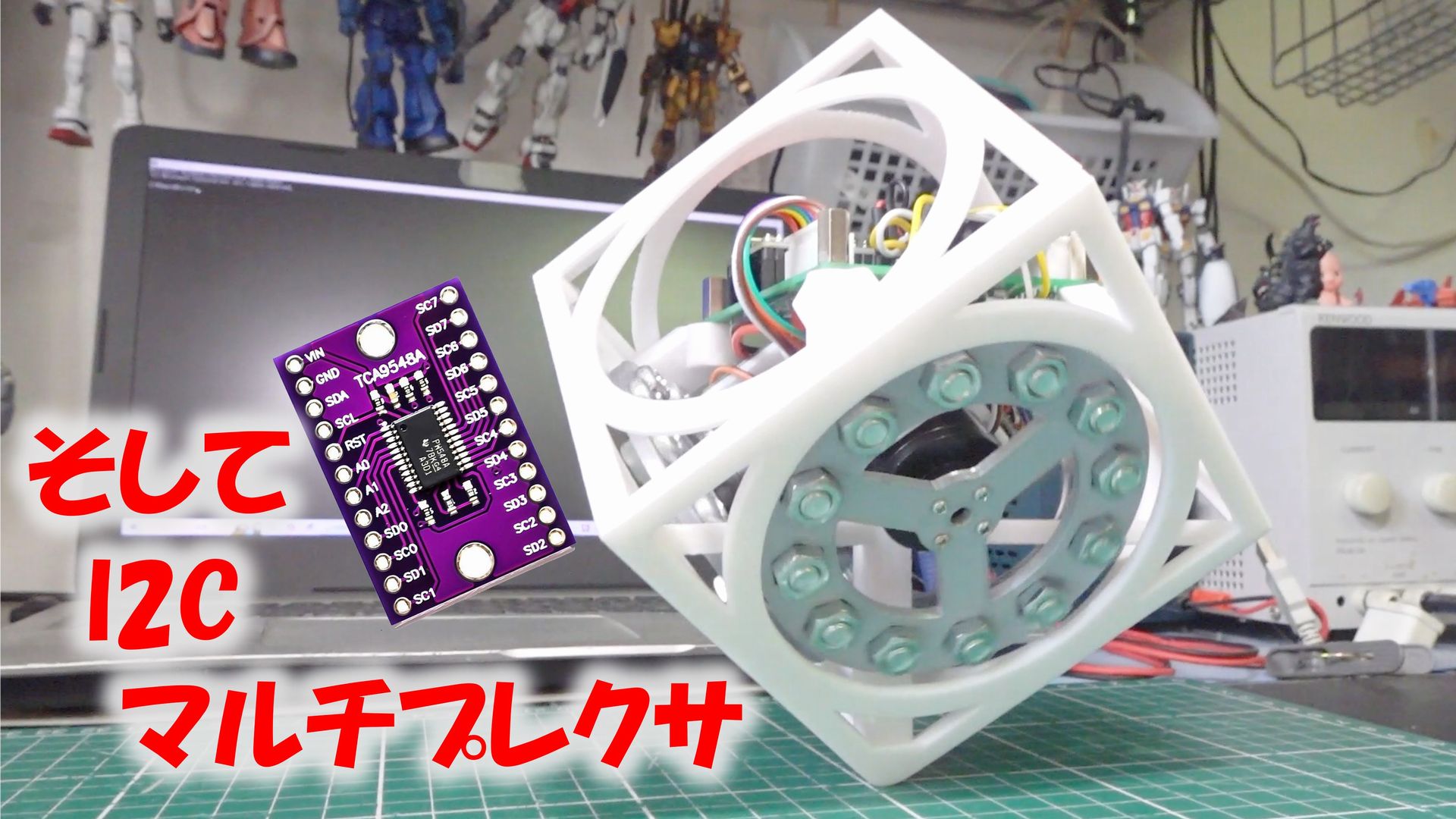
そして I2Cマルチプレクサ
これまでSimpleFOCによるブラシレスモータ制御で倒立振子やリアクションホイール姿勢制御モジュールなどの製作を楽しんできました。 モータを複数制御する際はエンコーダとしてA/B相出力のあるAS5601を使用してきました。 A/B相出力ではパルスカウンタで回転を検知するため異常回転時に絶対位置...

3重点倒立 ーリアクションホイールへの道70ー
先日 SimpleFOCでのブラシレスモータ制御による3軸姿勢制御モジュールを製作しました。 https://homemadegarbage.com/simplefoc08/ これにより手元に3機の3軸姿勢制御モジュールがそろいましたのでちょっと余計なことをしてみました。 &n...
電子工作 2024.10.7 お父ちゃん ![]()

SHISEIGYO-3 DC Go がゆく ーリアクションホイールへの道69ー
ずーーっと3軸姿勢制御モジュールの活用方法を考えてきて答えを出せずにいたのですが、ドローン用の小型モータによる3軸モジュール SHISEIGYO-3 DC を完成させたのを機に実際に手を動かす勇気めいたものが湧いてきました。 https://homemadegarbage.com/reaction...
電子工作 2024.5.30 お父ちゃん ![]()
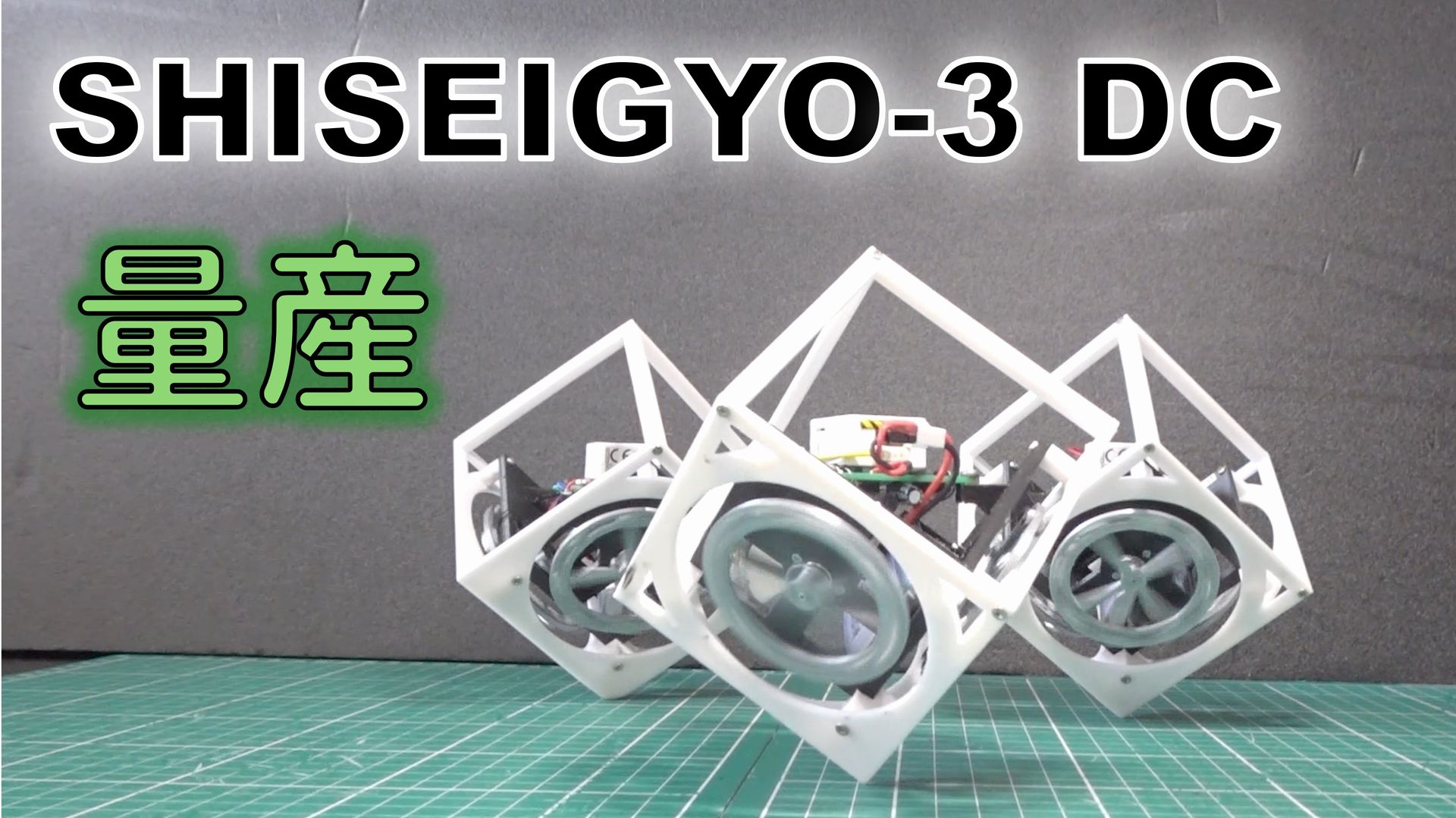
SHISEIGYO-3 DC 量産 ーリアクションホイールへの道68ー
前回は小型コアレスモータを用いて3軸姿勢制御モジュールを実現しました。 https://homemadegarbage.com/reactionwheel67// ここでは更にブラッシュアップを施しましたので報告いたします。 基...
電子工作 2024.3.16 お父ちゃん ![]()

SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
魅惑の3連休を前にふとDCモータで3軸姿勢制御モジュール作れないべか? と思い立ちました。 DCモータによる姿勢制御モジュールは1軸はもちろんのこと2軸までは確認済です。 https://homemadegarbage.com/reactionwheel52// 新規案件は準...
電子工作 2024.2.25 お父ちゃん ![]()

6重倒立に向けて③ ーリアクションホイールへの道66ー
前回は5重倒立の検証を実施しました。 https://homemadegarbage.com/reactionwheel65 ここでは遂に6重倒立に挑戦します。 6重倒立 あらためて6重倒立に使用するモジュールについて記載します。 上から以下のように積み上げま...
電子工作 2024.2.12 お父ちゃん ![]()

6重倒立に向けて② ーリアクションホイールへの道65ー
前回は6重倒立の実現に向けて本格的に始動し、4重倒立の確認を行いました。 https://homemadegarbage.com/reactionwheel64// ここでは5重倒立の検証をします。 5重倒立 記録更新 まずはモチベーションの維持と向上のために5...
電子工作 2024.2.7 お父ちゃん ![]()

6重倒立に向けて① ーリアクションホイールへの道64ー
昨年末より6重倒立の達成を目指して、極小のモジュールを製作したり 第6の新規モジュールを製作いたしました。 https://homemadegarbage.com/reactionwheel62// https://homemadegarbage.com/reactionwh...
電子工作 2024.1.31 お父ちゃん ![]()
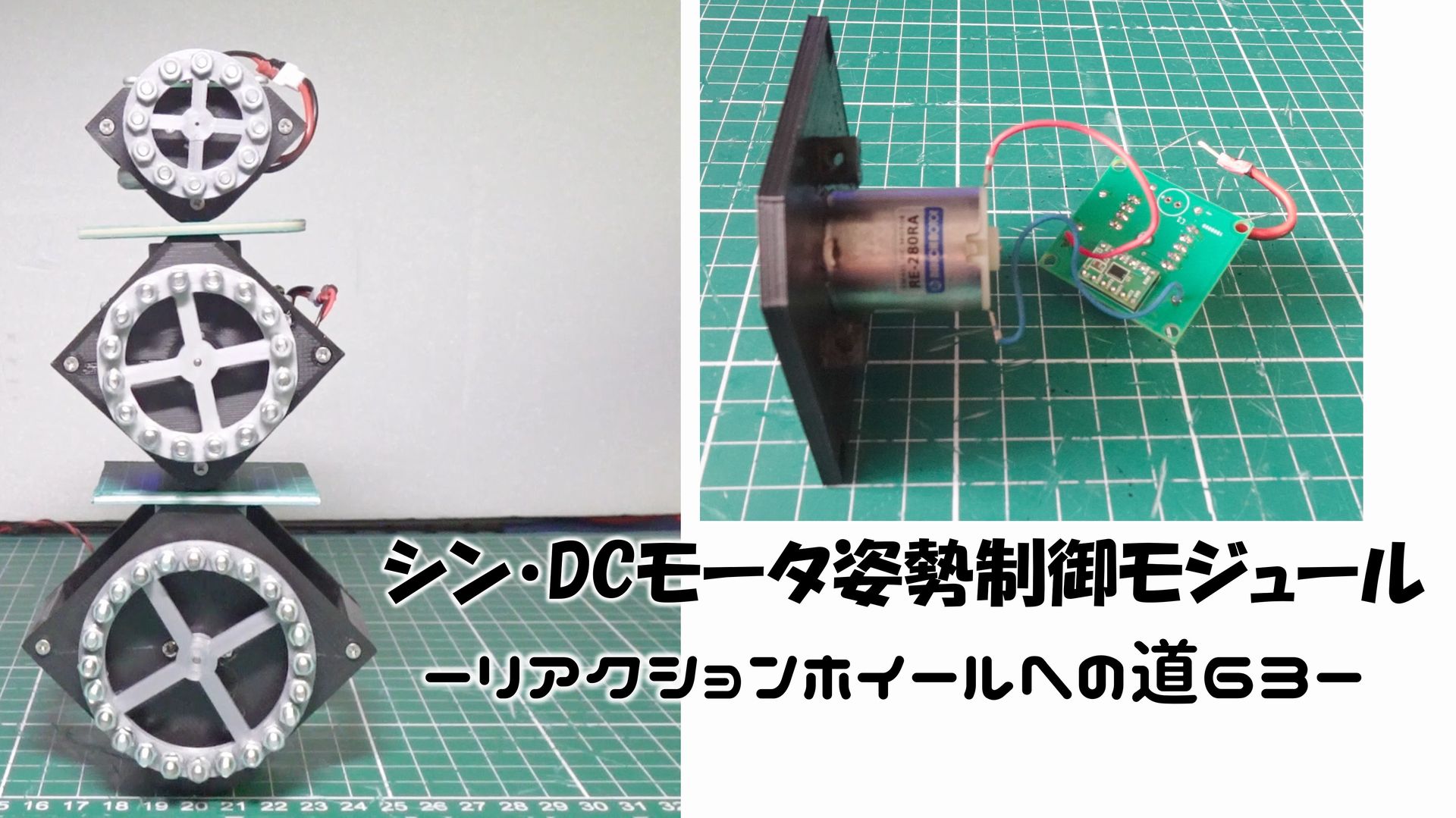
シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
HomeMadeGarbage Advent Calendar 2023 |22日目 前回から6重倒立に向けて準備を開始しております。 念願の5重倒立達成 ☟詳細はコチラhttps://t.co/uoq9a3fGf2 pic.twitter.com/3I6DR8jhjV — Ho...
Advent Calendar / 電子工作 2023.12.22 お父ちゃん ![]()