7重倒立に挑戦1 ーリアクションホイールへの道73ー
本記事にはアフィリエイト広告が含まれます。
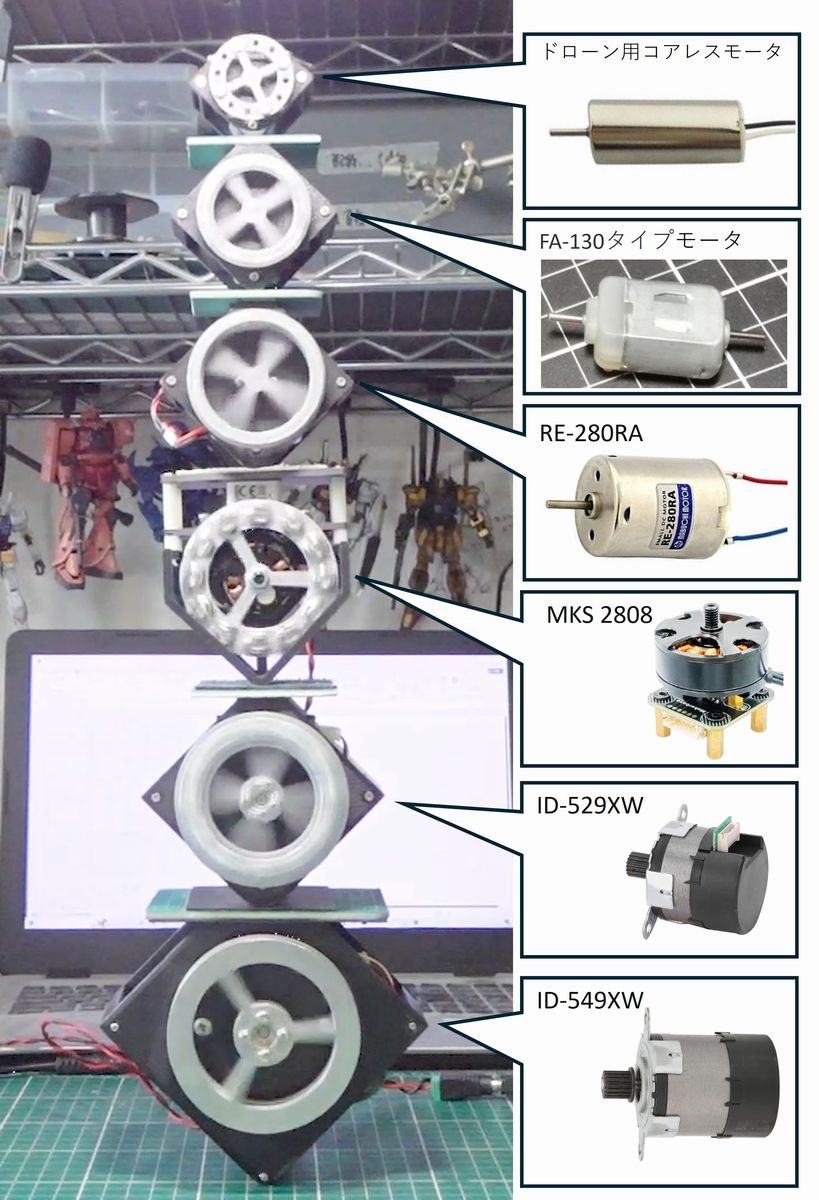
もはや恒例行事の姿勢制御モジュールの多重倒立挑戦。
今年は7重倒立を目指します。
去年は6重倒立に挑戦しました。

目次
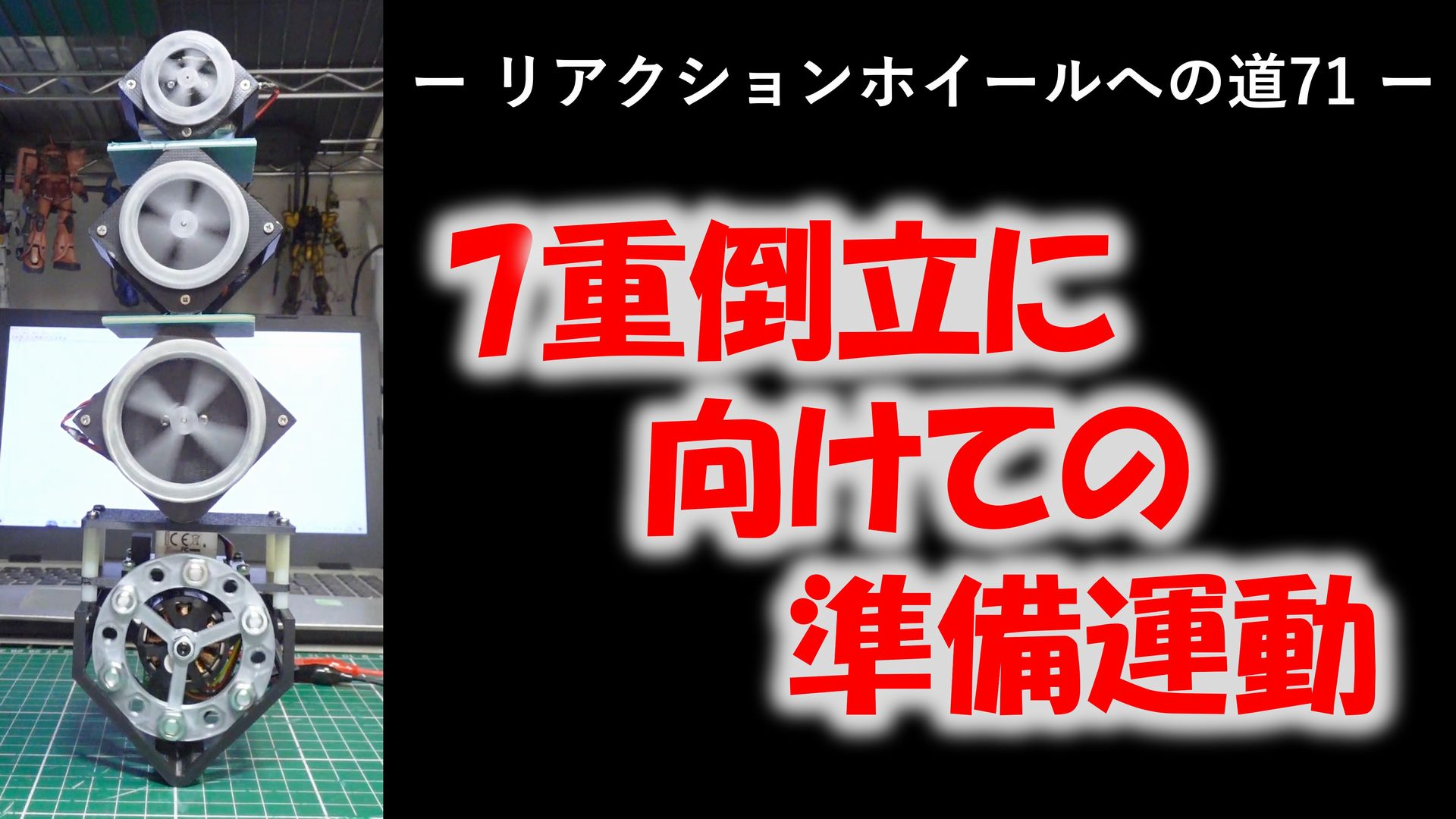
7重倒立に向けての準備運動
7重倒立実現に向けて去年末より少しづつ準備は進めておりました。
7台目としてSimpleFOCによるブラシレスモータ駆動の新規モジュールを検討・製作しました。
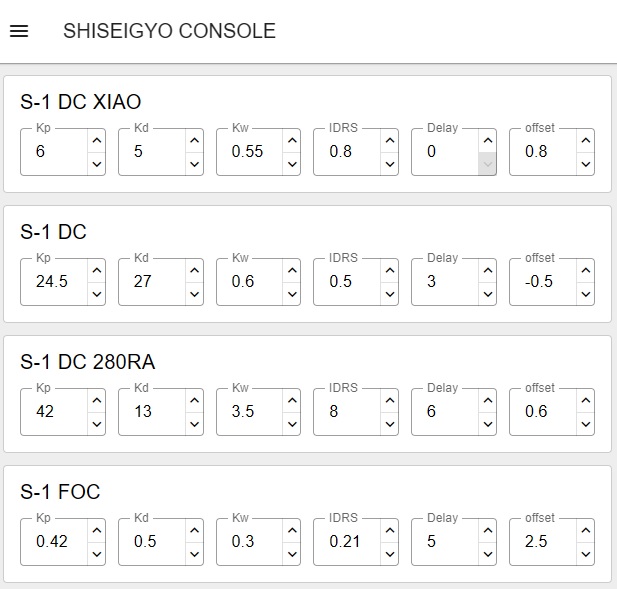
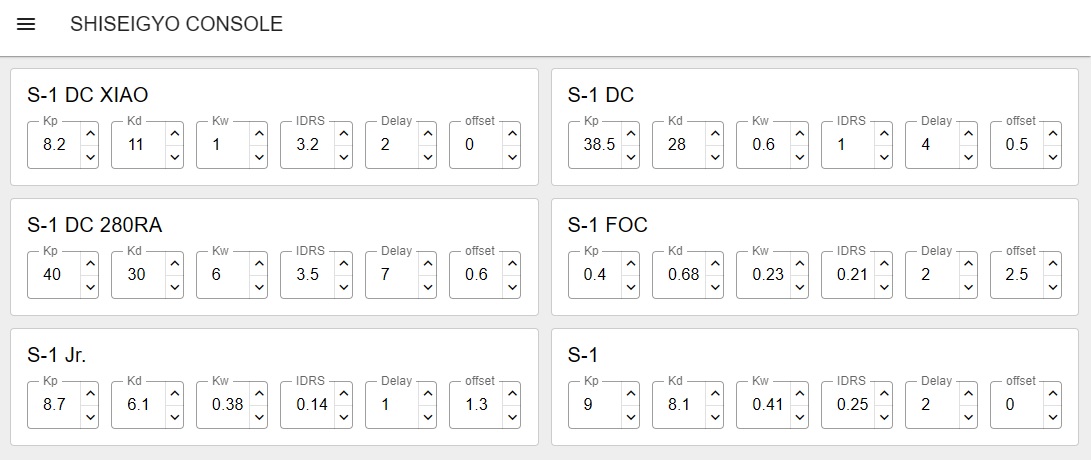
また複数のモジュールの制御パラメータをUDP通信で一括で外部PCから制御できるコンソールアプリも開発いたしました。
↓パラメータ調整用ブラウザアプリ
7台目の新規姿勢制御モジュール (SHISEIGYO-1 FOC) を去年の6重倒立の上から4番目に挿入して7重倒立を目指します。
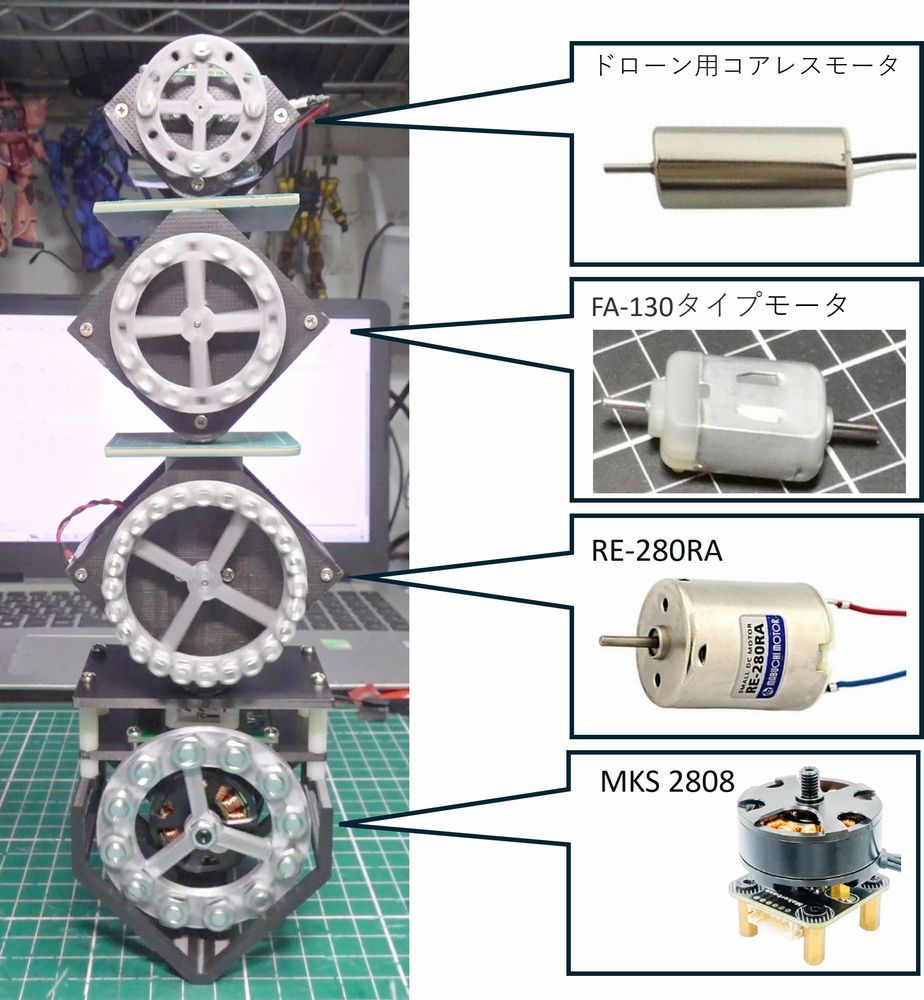
4重倒立
新規の姿勢制御モジュール SHISEIGYO-1 FOC を絡めてまずは安定した4重倒立を目指します。
構成としては以下のとおり、一番下を SHISEIGYO-1 FOC とします。
アプリでパラメータを調整しながら安定条件を探って恒久的な4重倒立を実現できました。
恒久的4重倒立達成 pic.twitter.com/Z2ggHIcLnv
— HomeMadeGarbage (@H0meMadeGarbage) January 18, 2025
5重倒立
更に1段下に追加して安定的5重倒立も実現できました。
恒久的5重倒立達成 pic.twitter.com/zIglyEugnX
— HomeMadeGarbage (@H0meMadeGarbage) January 19, 2025
構成は以下のとおり
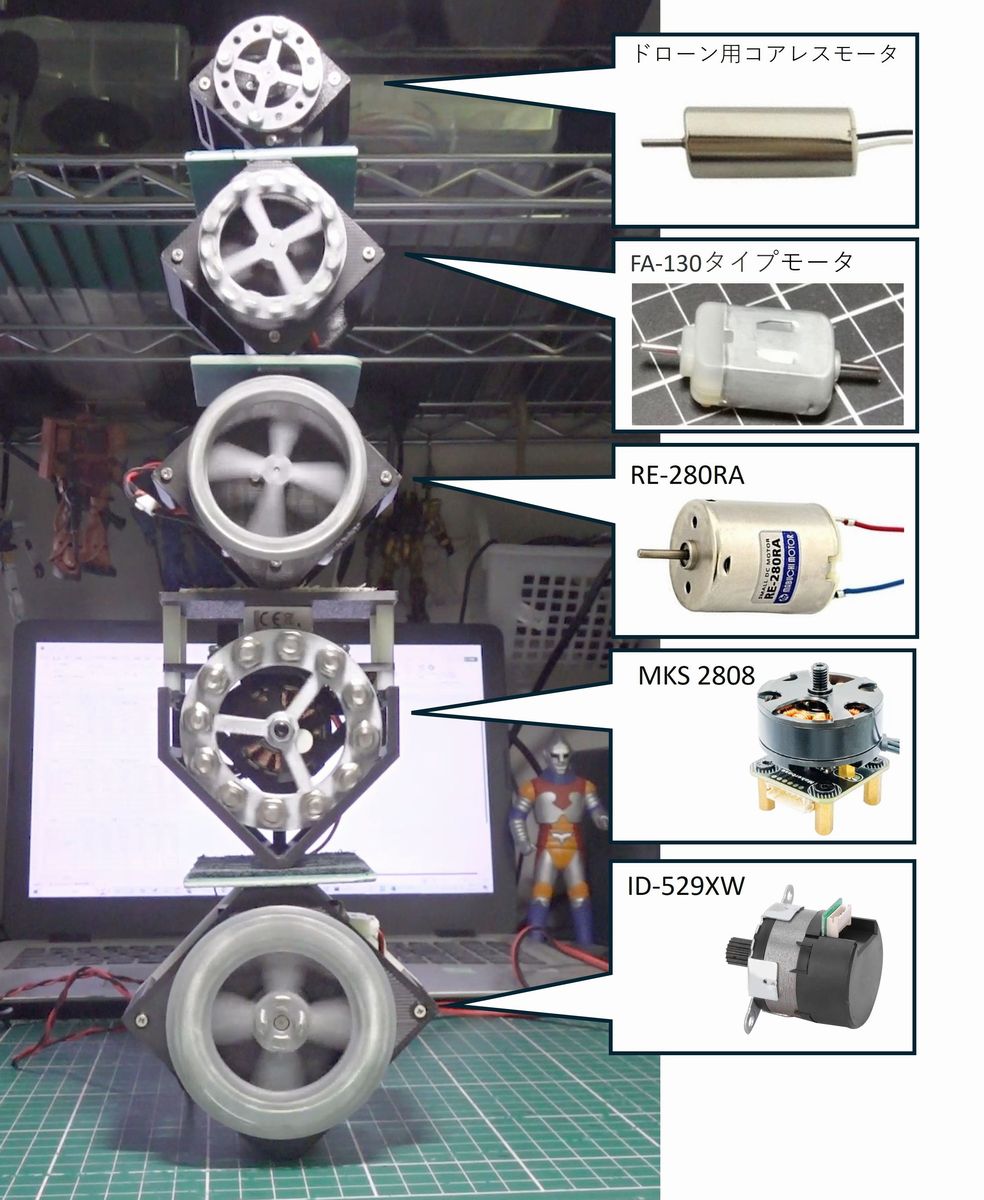
この際に上から2番目のモジュール SHISEIGYO-1 DC のホイールのネジを増やしてトルクを増量しました。

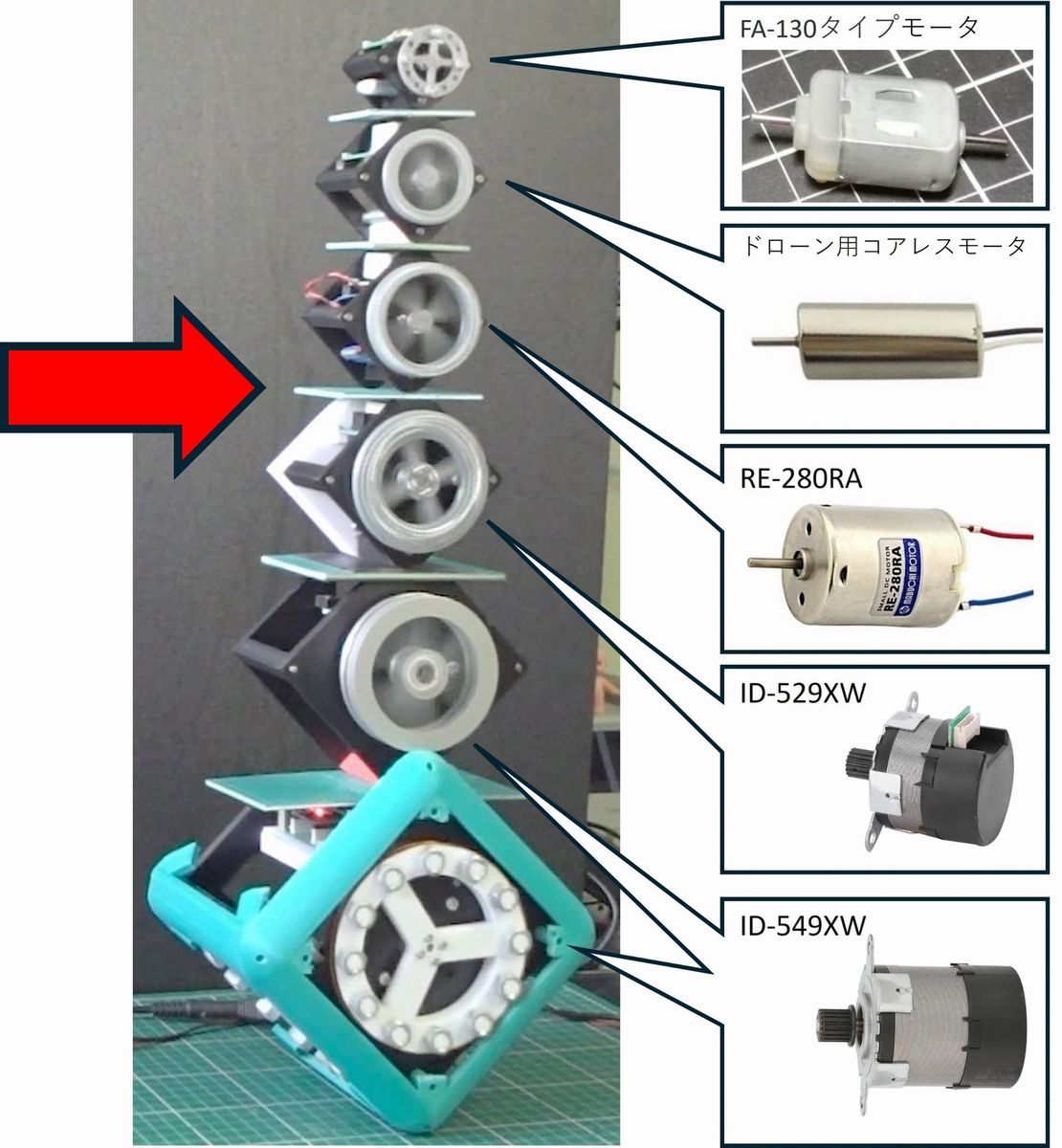
6重倒立
ついに去年の倒立台数である6重に挑戦します。
パラメータ調整アプリも6台用にカスタマイズ
流石に6重倒立は難しい。。。
1stトライの最長倒立時間は 16秒でした。
現状 6重倒立の記録は16秒
去年が6秒だったから成長はしている
ここでコンスタントに1分超えできないようでは7重倒立などできない。魂で重力を捕えろ pic.twitter.com/ftzVvIojrL
— HomeMadeGarbage (@H0meMadeGarbage) January 20, 2025
去年の6重倒立の倒立時間は6秒でしたので成長はみられますが、これでは7重倒立は目指せません。
更に集中してパラメータ調整し、安定的に1分以上の倒立ができるようになりました。
構成は以下のとおり
おわりに
ここでは7重倒立を目指して新規姿勢制御モジュールを絡めての安定多重倒立の検討を実施しました。
去年の記録を大きく更新する6重倒立が実現できましたので、次回はいよいよ7重倒立に挑戦したいと思います。
それではまた