7重倒立に向けての準備運動2 ーリアクションホイールへの道72ー
本記事にはアフィリエイト広告が含まれます。
前回は新規のSimpleFOCによるブラシレスモータ制御の1軸姿勢制御モジュールを製作して7重倒立実現に向けた検証を実施しました。
不安定ではありましたが新規モジュールを一番下にして上に3段追加した4重倒立動作の確認を実施しました。
ここでは将来的目標である7重倒立を見据えた安定4重倒立に向けて検証を進めましたので報告いたします。

目次
SHISEIGYO-1 FOC 調整
SimpleFOCによるブラシレスモータ制御の1軸姿勢制御モジュール (SHISEIGYO-1 FOCと命名しました。電流センスをしないただのクローズドループ制御なので正確にはFOCではないのだけどまぁいいだろ)の調整を実施しました。
DRV8311Hモジュール への配線を整えて

ホイールのナットも増やしてトルクを増強
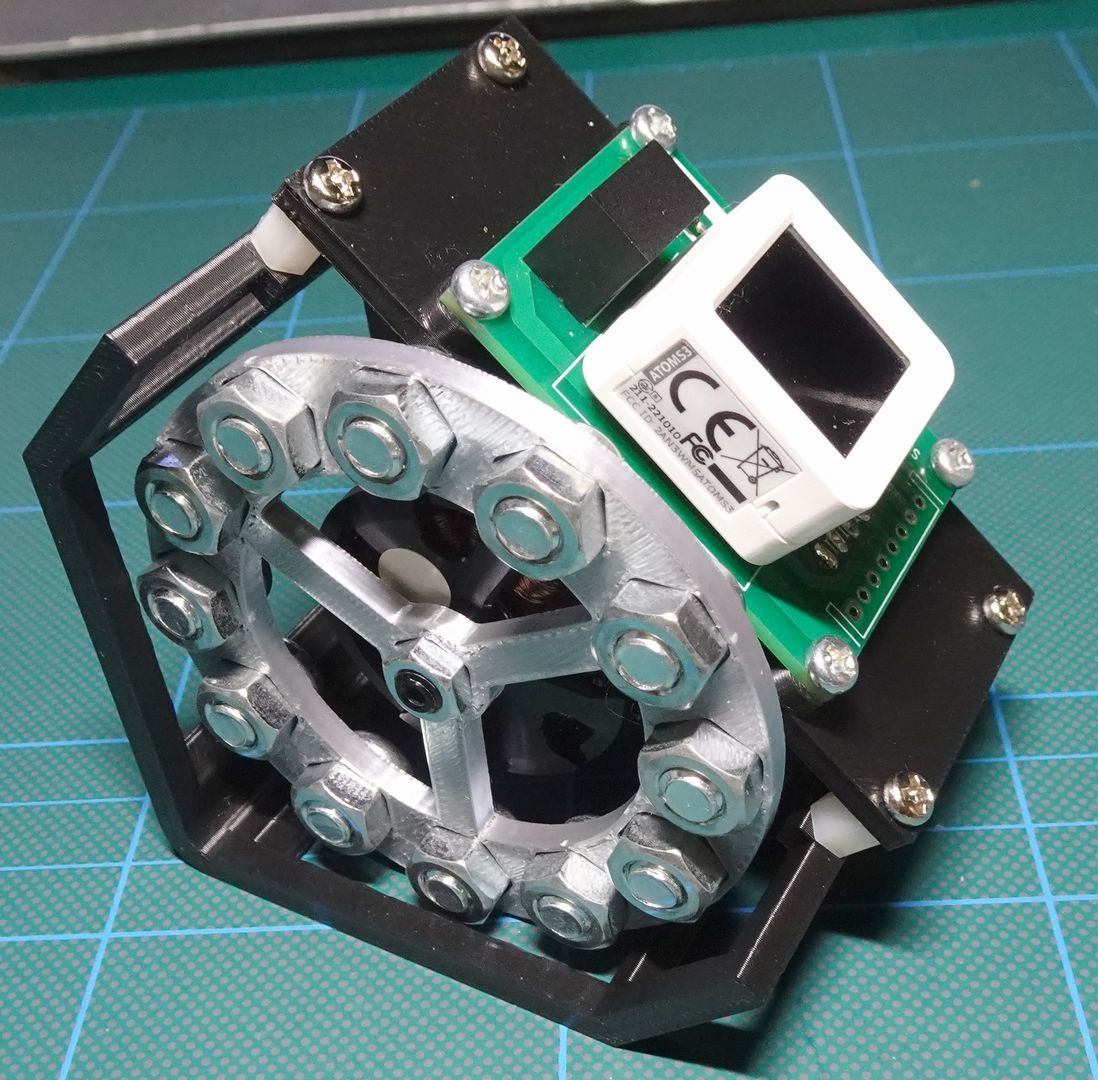
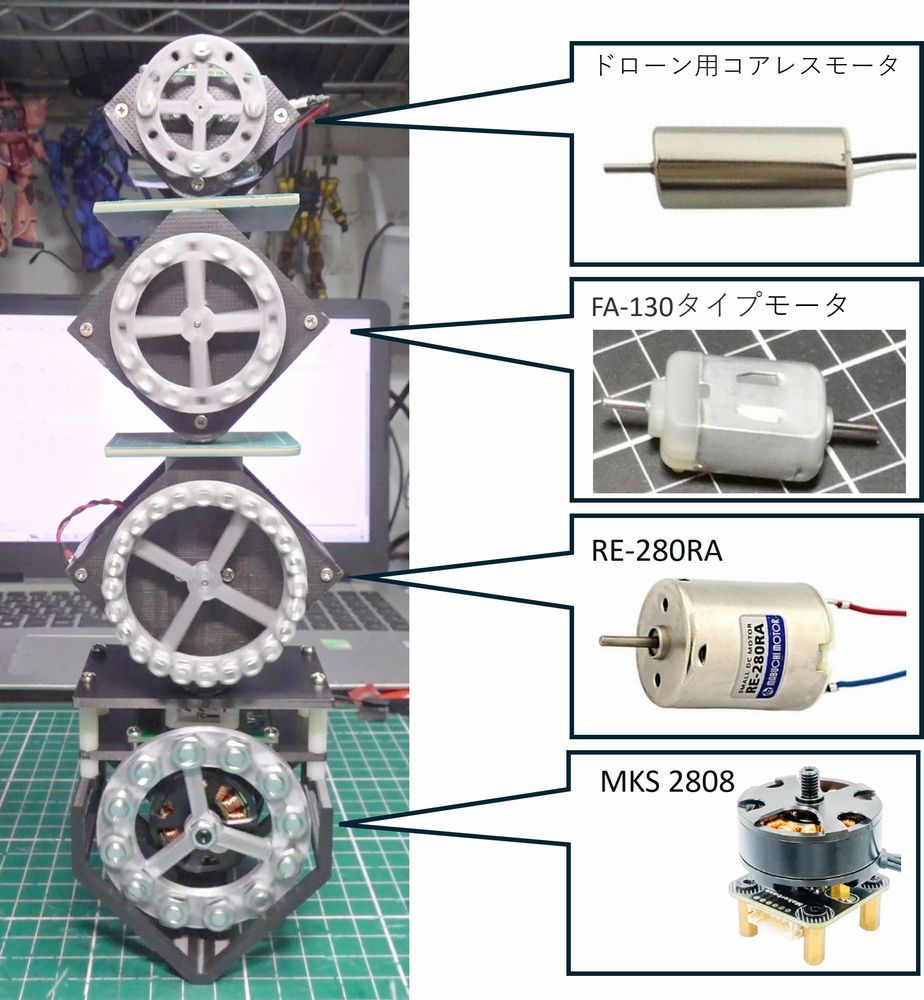
モータとエンコーダは引き続き以下を使用。

動作
ひとまず3重倒立で動作確認
ブラシレスモータで強い倒立を pic.twitter.com/wdVRIpz1Jo
— HomeMadeGarbage (@H0meMadeGarbage) November 18, 2024
トルクも増して3重倒立は余裕で永久にできますね。
パラメータ調整アプリ
4重倒立に向けて各モジュールのパラメータ調整が必要となります。
これまでは各モジュールをアクセスポイントとしてそれぞれにWiFi接続してパラメータの調整を実施しておりました。
今後7重倒立を目指すにあたりこの方式では効率が悪すぎるので複数台を一括で調整できるコンソールアプリを制作しました。
各モジュールをローカルネットワークにWiFI接続してPCからUDP通信でパラメータ調整することにしました。
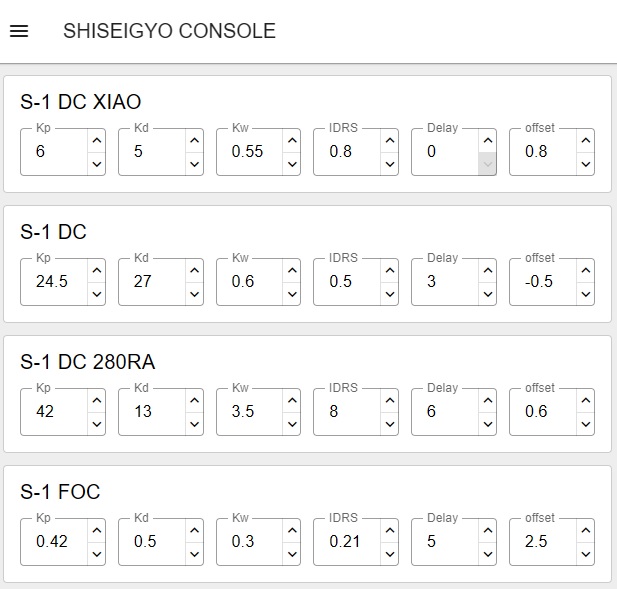
4台のモジュールのパラメータを調整するアプリをNode-REDで制作しました。
UDPブロードキャストしてポートで各モジュールや入力/出力を切り分けてパラメータを調整・管理します。
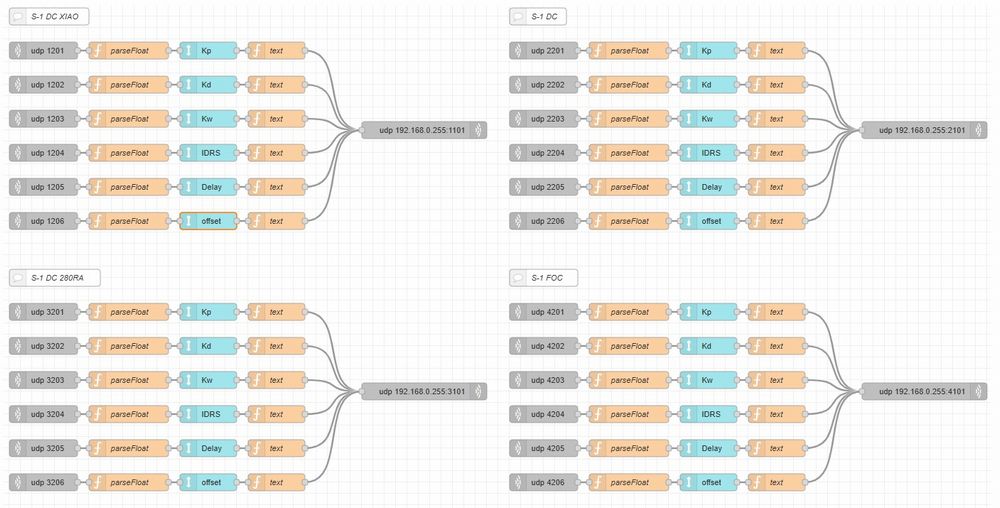
UIにはNode-RED Dashboard 2.0を使用しました。
4重倒立
制作したコンソールアプリを用いてパラメータ調整し4重倒立を実施しました。
4重倒立
コンソールアプリ作ってブラウザで一括でパラメータ調整できるようにした
最初からこうしておけばよかったわ#nodeRED pic.twitter.com/jubGYN16Hz— HomeMadeGarbage (@H0meMadeGarbage) November 19, 2024
まだ完璧とは言えませんが比較的安定した4重倒立が実現できました。
パラメータ調整も容易になり非常に楽になりました。
おわりに
ここではSimpleFOCによるブラシレスモータ1軸姿勢制御モジュール (SHISEIGYO-1 FOC) の調整とパラメータ調整用アプリ作成を実施し、4重倒立の動作確認をしました。
以後はアプリを7重倒立用に拡張して来年の実現に向けて精神を統一したいと思います。
今回の4重倒立は以下のとおりです。
コレの下に更に3段追加して7重倒立を来年目指します。