
近藤科学
二足歩行ロボット SHISEIGYO-1 Walker 再考
先日、以前製作した二足歩行ロボット SHISEIGYO-1 Walker の動画をみてたら新鮮にいい動きだなと思いましたよ。 https://twitter.com/H0meMadeGarbage/status/1718142708714524859 https://homemadegarbag...
電子工作 2023.11.7 お父ちゃん ![]()
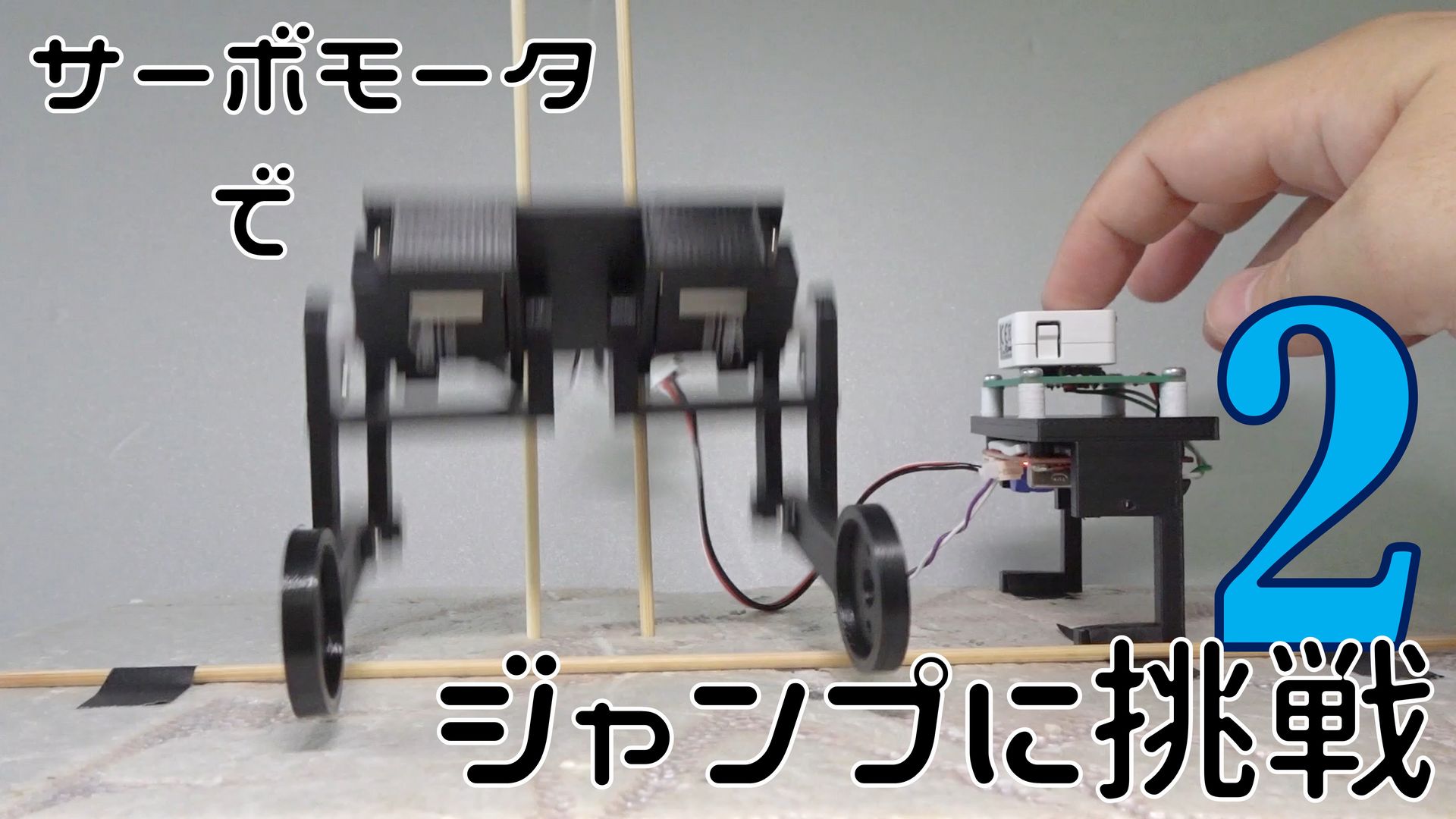
サーボモータでジャンプに挑戦2
以前、サーボモータで足を構築してジャンプ動作の確認を実施しました。 https://homemadegarbage.com/bala13// ここでは更に検証しましたので報告します。 KRS-3301 前回は KRS-3301で1脚ロボットを作製してジャンプ動作...
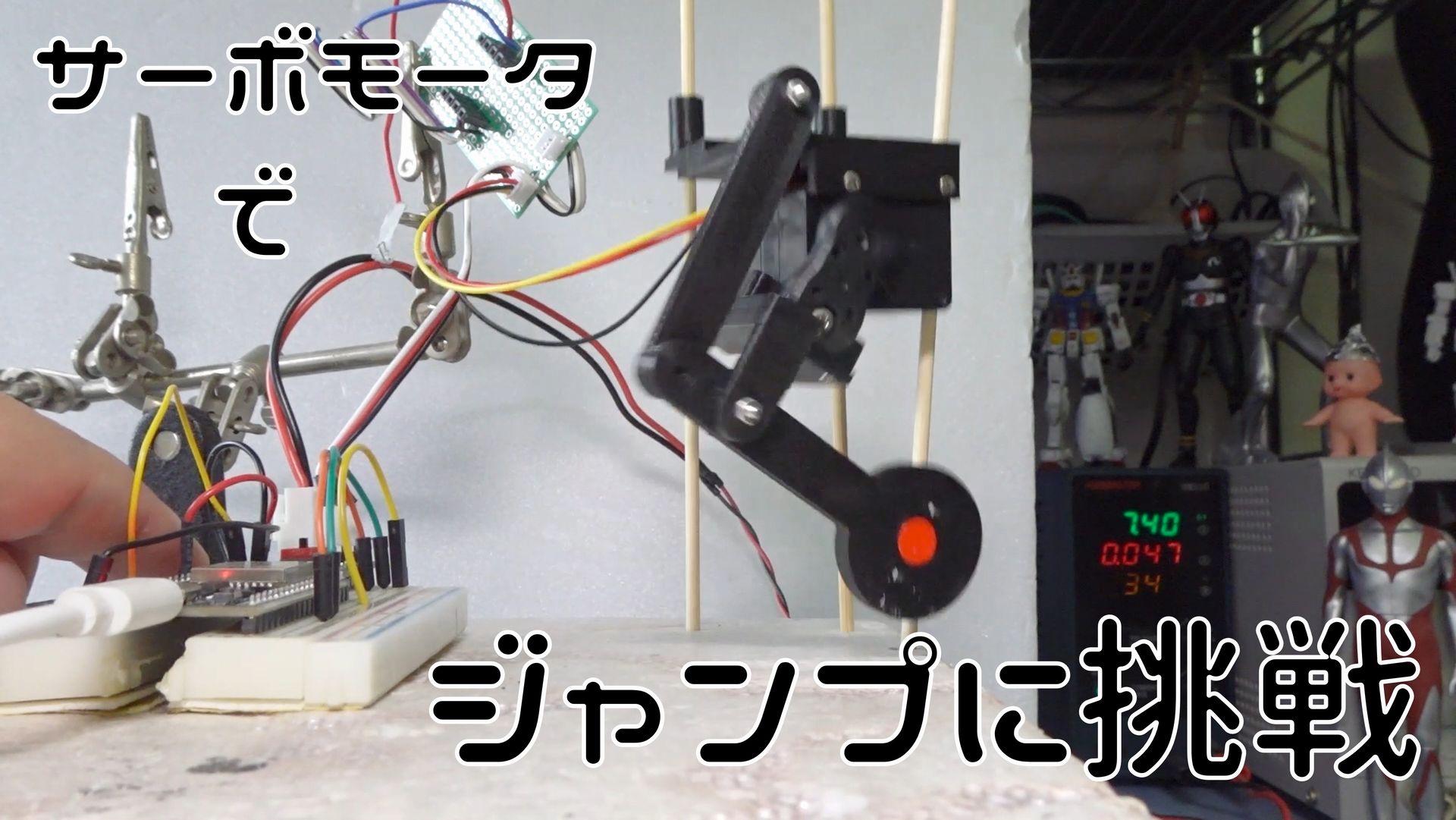
サーボモータでジャンプに挑戦
以前に屈伸タイプの倒立振子を製作しました。 https://homemadegarbage.com/bala11 この倒立振子をジャンプさせてみたくなったので検討します。 ジャンプする倒立振子 こんなすごい倒立振子を見つけました。 https://twitte...
二足歩行ロボット SHISEIGYO-1 Walker 改
これまでは SHISEIGYO-1 Walker 参 の足を改良して二足歩行動作を検証してきました。 https://homemadegarbage.com/onewalkersan09 ここでは 初代 SHISEIGYO-1 Walker の足を改良して歩行動作の検証を実施しま...
電子工作 2023.3.7 お父ちゃん ![]()
SHISEIGYO-1 Walker 参 を実現させたい俺6 ーバッテリ内蔵ー
前回はSHISEIGYO-1 Walker 参 の歩行動作の実現を確認できました。 https://homemadegarbage.com/onewalkersan05// SHISEIGYO-1 Walker 参はリアクションホイールでバランスをとり、格安シリアルサーボLX-244で構成された...
電子工作 2022.9.13 お父ちゃん ![]()
SHISEIGYO-1 Walker 参 を実現させたい俺5 ー歩行検討3ー
だいぶ期間があいてしまいましたが、シリアルサーボLX-244で足を構築しリアクションホイールでバランスをとる二足歩行ロボット"SHISEIGYO-1 Walker 参" の歩行検討を実施いたしました。 前回は歩行動作の自動化を目指し歩行動作をプログラミングしましたが上手くいかず、サーボのギアに...
電子工作 2022.9.8 お父ちゃん ![]()

SHISEIGYO-1 Walker 参 を実現させたい俺4 ー歩行検討2ー
前回はシリアルサーボLX-244で構築した足の形状を検討し、遠隔で足の位置を手入力で指定しながら足を交差させての一歩を踏み出すことができました。 https://homemadegarbage.com/onewalkersan03/ ここでは手動による足座標指定ではな...
電子工作 2022.7.9 お父ちゃん ![]()

SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
前回はシリアルサーボLX-244で2足を構築し、リアクションホイールによる自立動作を確認しました。 https://homemadegarbage.com/onewalkersan02/ ここからはついに歩行に向けて検証進めたいと思います。 足の形状検討 歩行検...
電子工作 2022.7.1 お父ちゃん ![]()

SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
前回はシリアルサーボLX-244を用いて片足動作を確認しました。 https://homemadegarbage.com/onewalkersan01 精度も良くSHISEIGYO-1 Walker の実現に使えそうと判断しましたので、ここでは更に検証を進めます。 ...
電子工作 2022.6.27 お父ちゃん ![]()
SHISEIGYO-1 Walker 参 を実現させたい俺1 ーサーボ味見ー
これまで2機種のリアクションホイールによってバランスする2足歩行ロボットを製作してきました。 初代のSHISEIGYO-1 Walker は歩行には成功しましたが使用したシリアルサーボ(KRS3301)のトルクが十分でなく、重心が低くゆっくりとした動作となりました。 二代目...
電子工作 2022.6.16 お父ちゃん ![]()

SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー
前回は高トルク中華サーボで足を構築して、リアクションホイールでバランスをとるロボット(2号機)を検討しました。 https://homemadegarbage.com/onewalkerni01/ サーボの大きさや動作角度の精度を鑑みて以下のようなガニ股型のロボットにいたしました...
電子工作 2022.3.21 お父ちゃん ![]()

SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
以前に姿勢制御リアクションホイールに足をつけて2足歩行ロボットを製作しました。 https://homemadegarbage.com/onewalker05/ 1号機のSHISEIGYO-1 Walkerはシリアルサーボ KRS3301を使用しておりました。 SHISEI...
電子工作 2022.3.19 お父ちゃん ![]()

SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
前回はリアクションホイールを用いたオートバランスによる前進歩行を確認することができました。 https://homemadegarbage.com/onewalker04 その他モーションも作りましたので報告いたします。 後進 後ろ歩きもできるようになりました。...
電子工作 2022.1.30 お父ちゃん ![]()
SHISEIGYO-1 Walkerを実現させたい俺4 ー歩行検討2ー
前回は足の座標からバランスする姿勢角を算出しての制御を確認いたしました。 https://homemadegarbage.com/onewalker03// ここでは歩行動作の最終調整を実施いたしました。 機体調整 これまでいじってきて改善点が見えてきましたので...
電子工作 2022.1.28 お父ちゃん ![]()
SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
前回はSHISEIGYO-1 Walkerの足構造と逆運動学を再検討し、ヨチヨチではありますが歩行動作を確認いたしました。 https://homemadegarbage.com/onewalker02// ここではバランス動作について検討します。 バランス動作検...
電子工作 2022.1.25 お父ちゃん ![]()