
近藤科学
SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
前回はシリアルサーボ (KRS3301) による足とリアクションホイールによるオートバランスシステムで 二足歩行ロボットSHISEIGYO-1 Walker を製作し、片足立ちを実現いたしました。 https://homemadegarbage.com/onewalker01/ [amazon...
電子工作 2022.1.24 お父ちゃん ![]()

SHISEIGYO-1 Walkerを実現させたい俺1 ーキックオフー
先日 2軸の姿勢制御モジュール SHISEIGYO-2を用いて二足歩行ロボット(SHISEIGYO-2 Walker)を製作いたしました。 https://homemadegarbage.com/walker03// ここでは新たな2足歩行ロボットの実現を目指して検討を進めます。 ...
電子工作 2022.1.22 お父ちゃん ![]()

歩行検討2 -シリアルサーボと距離を詰めたい俺7-
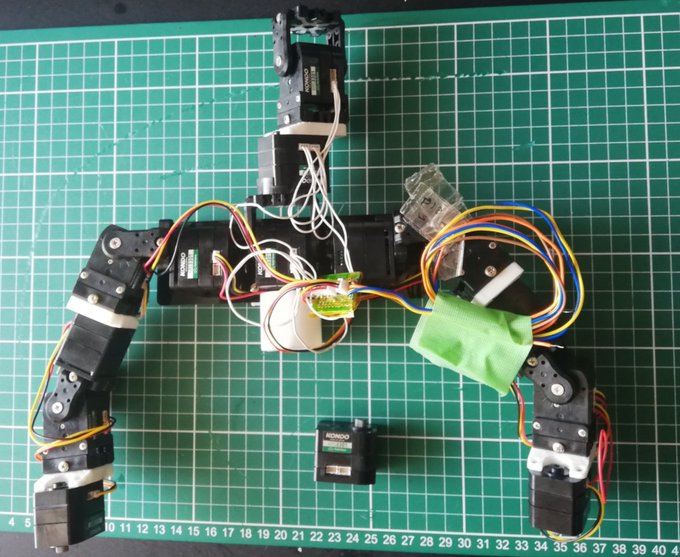
前回からシリアルサーボ (KRS3301)を用いて製作した足ロボットの歩行の検討を始めました。 https://homemadegarbage.com/krs06/ [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-3...
電子工作 2022.1.13 お父ちゃん ![]()
歩行検討1 -シリアルサーボと距離を詰めたい俺6-
前回は製作した足を逆運動学で制御して各足を任意の座標に動かせるようにしました。 https://homemadegarbage.com/krs05// ここからはいよいよ歩行の検討にはいります。 足踏み運動 歩行の前にまずは以前に順運動学でやった足踏みを逆運動学...
電子工作 2022.1.11 お父ちゃん ![]()
足を逆運動学で制御 -シリアルサーボと距離を詰めたい俺5-
前回はシリアルサーボ (KRS3301)を用いて製作した足で足踏み動作を実現しました。。 https://homemadegarbage.com/krs04// [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-330...
電子工作 2022.1.10 お父ちゃん ![]()

シリアルサーボで足踏み -シリアルサーボと距離を詰めたい俺4-
前回はシリアルサーボ (KRS3301)を用いて足を製作しました。 https://homemadegarbage.com/krs03/ [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-3301 IC...
電子工作 2022.1.8 お父ちゃん ![]()
シリアルサーボで足製作 -シリアルサーボと距離を詰めたい俺3-
前回はシリアルサーボ (KRS3301)を用いてロボットアームを製作しました。 https://homemadegarbage.com/krs02/ [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-3301 ICS"...
電子工作 2022.1.7 お父ちゃん ![]()
シリアルサーボでロボットアーム -シリアルサーボと距離を詰めたい俺2-
憧れのシリアルサーボ (近藤科学 KRS-3301) を入手し、前回はじめて動作させました。 https://homemadegarbage.com/krs01 ここではシリアルサーボでロボットアームを製作しましたので報告いたします。 ロボットアーム 前回の連動...
はじめてのシリアルサーボ -シリアルサーボと距離を詰めたい俺1-
以前から憧れを抱きつつもなかなか手が出せなかったシリアルサーボ。 でべさんから譲っていただき、やっと触れることができました。 良いサーボを入手 まず私とこのサーボとの距離をつめないといけませんね。 https://t.co/ucGfDetipq pic.twitter.com/n7fd7C...
電子工作 2021.12.30 お父ちゃん ![]()