
Node-RED
ついに達成!!! 8重倒立への道4
前回はSHISEIGYO-1の筐体を新造して、7重倒立の検討を実施しました。 https://homemadegarbage.com/reactionwheel78// ここでは安定的7重倒立を実現させて、ついに8重倒立に挑戦します。 8台のモジュール 今...
電子工作 2026.1.18 お父ちゃん ![]()




シン SHISEIGYO-1 Walker の開発1
先日大変素晴らしいPWMマイクロサーボを見つけまして 低価格ですがトルク・精度申し分なく 4脚ロボットを作ったりしました。バク転もできます。 https://homemadegarbage.com/robot-ptk7465/ もうサーボモータを使用した工作...
電子工作 2025.11.23 お父ちゃん ![]()

ブラシレスモータで2足歩行ロボット12 ー はじめての金属加工 ー
前回はブラシレスモータを用いた2足歩行ロボットの動作検討を実施して、現行の3自由度の足としては満足いく結果を得ることができました。 https://homemadegarbage.com/robottrip13// 家のドロイドや。かわええやろ ...
電子工作 2025.4.11 お父ちゃん ![]()

ブラシレスモータで2足歩行ロボット11 ー 動作検討3 ー
前回は足底に低反発スポンジを採用することでスムーズな足運動動作を実現することができました。 https://homemadegarbage.com/robottrip12/ 歩行もしっかり足を上げてスムーズにできるようになりました。 ...
電子工作 2025.4.7 お父ちゃん ![]()
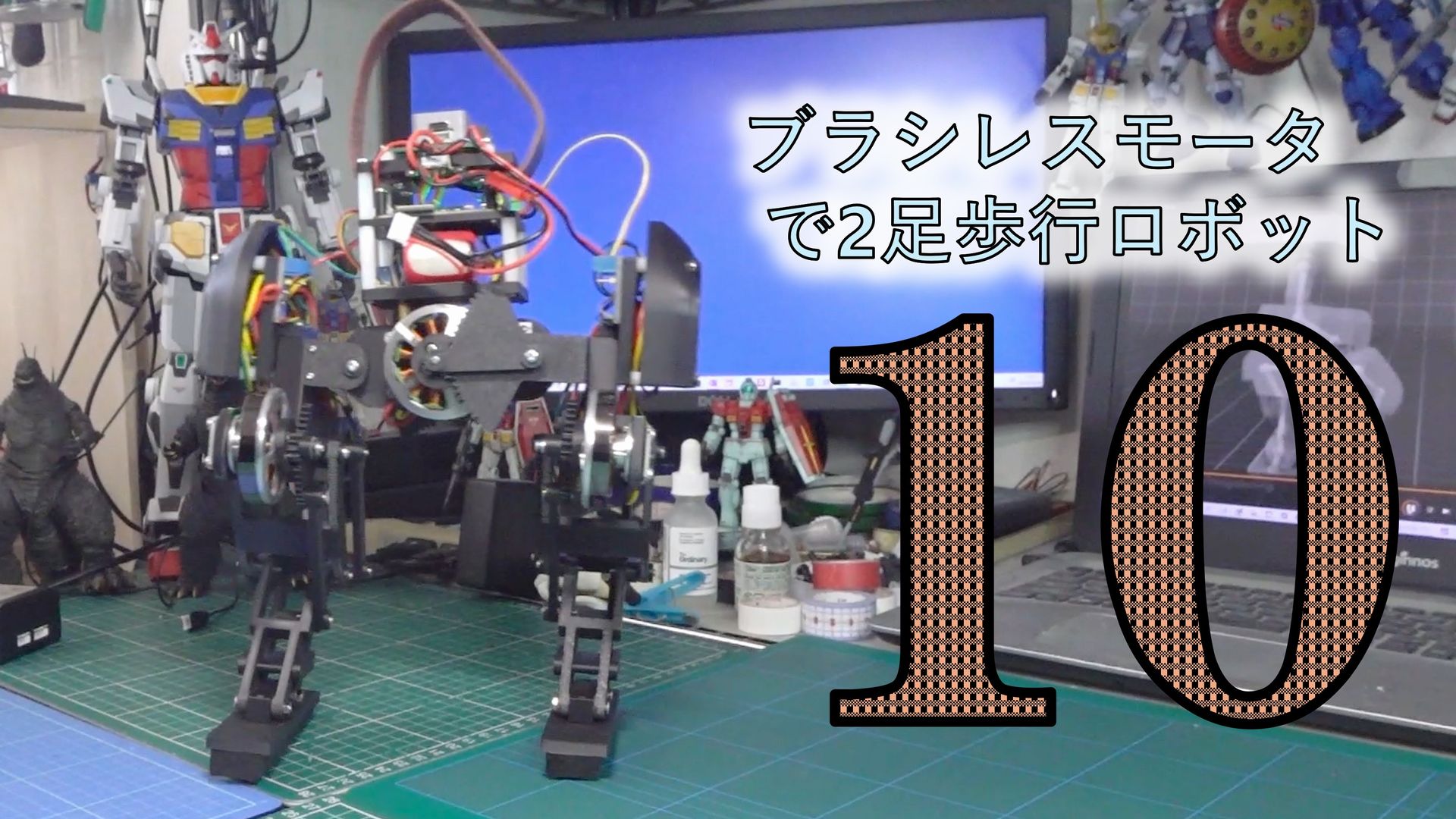
ブラシレスモータで2足歩行ロボット10 ー 動作検討2 ー
前回はCAN通信を導入してモータトルクによるウェイトシフト検知での足踏み動作を確認しました。 https://homemadegarbage.com/robottrip11// 足踏み 念願のモータトルクからウェイトシフト検知して足切換自動化 やっとできたわ。 pic.t...
電子工作 2025.3.29 お父ちゃん ![]()
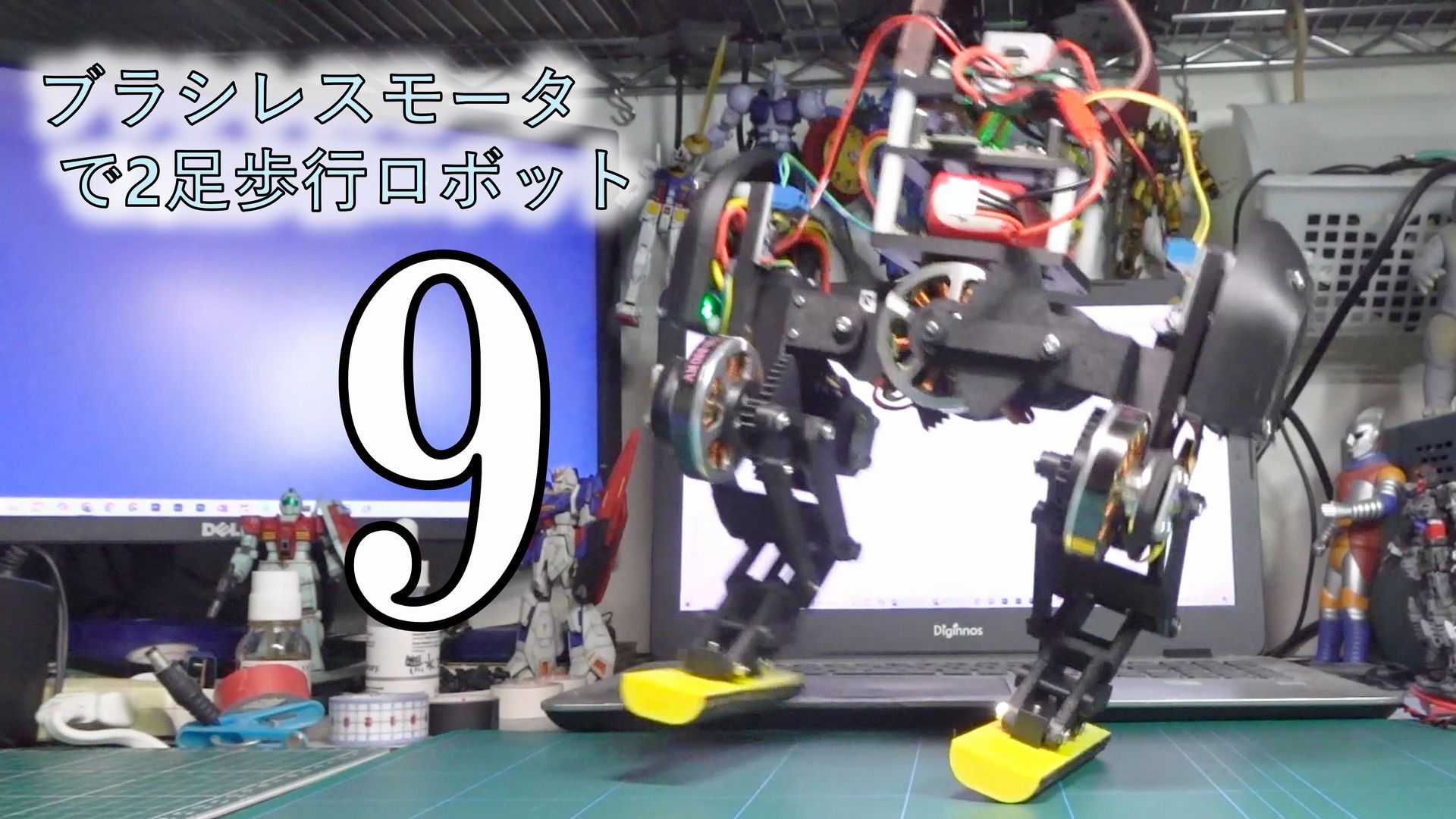
ブラシレスモータで2足歩行ロボット9 ー CAN通信導入 ー
前回は足踏みや歩行動作の検討を実施しました。 https://homemadegarbage.com/robottrip10/ 足のロール軸駆動をサーボモータからブラシレスモータにして立派な動作を実現できると思ったのですが、左右の足動作の切り替え自動化が難しかったです。 左右の...
電子工作 2025.3.26 お父ちゃん ![]()

ブラシレスモータで2足歩行ロボット8 ー 動作検討 ー
前回はロール軸の機構をサーボモータからブラシレスモータに変更してロボットを製作しました。 https://homemadegarbage.com/robottrip09// ここでは本格的にこちらの動作を検討いたします。 サイズ まず本ロボットのサイズのご紹...
電子工作 2025.3.22 お父ちゃん ![]()
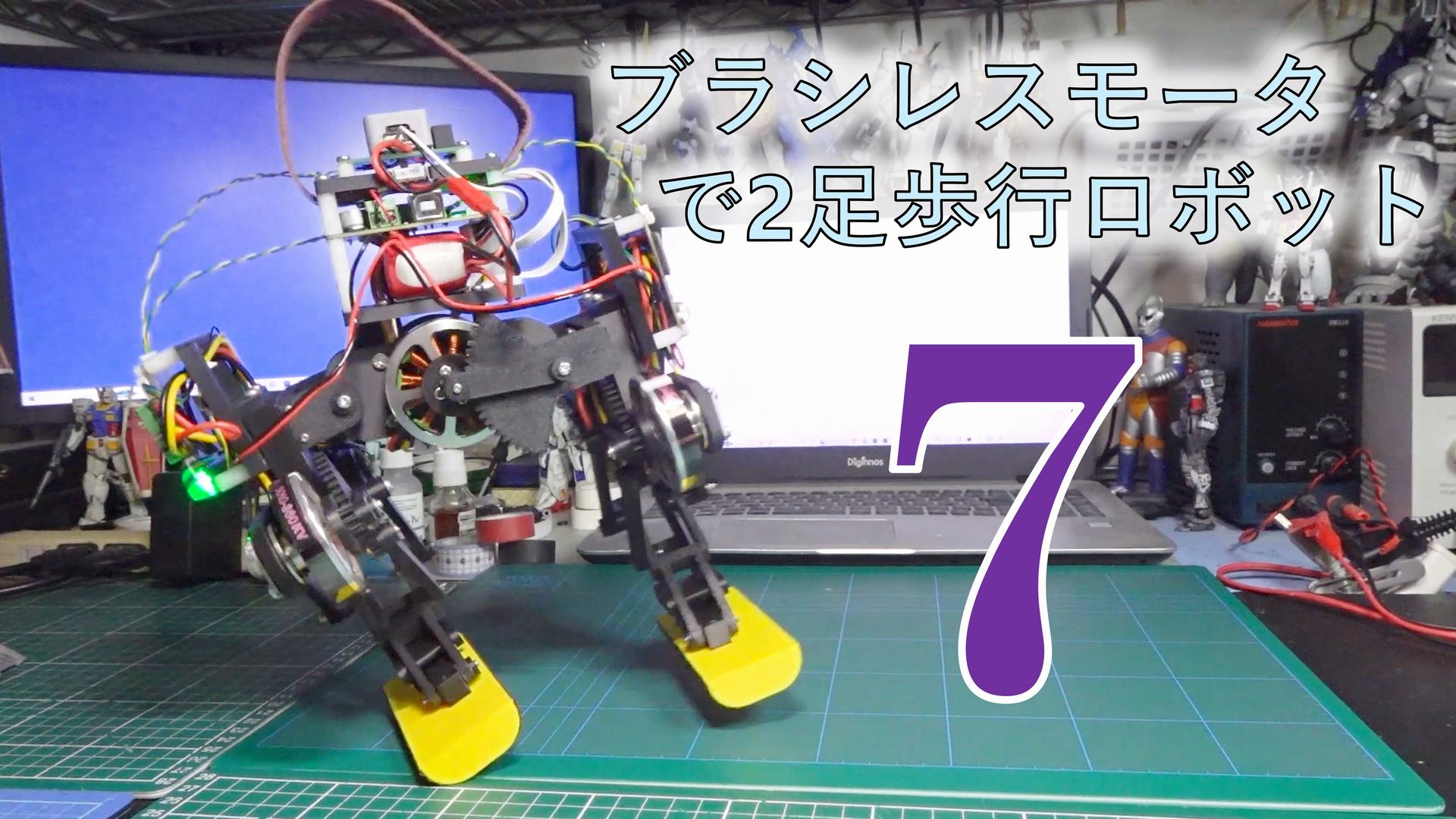
ブラシレスモータで2足歩行ロボット7 ー ロール軸BLDC導入 ー
前回は片足3自由度の2足歩行ロボットの足上げ歩行動作について検討しました。 https://homemadegarbage.com/robottrip08/ ブラシレスモータによる2軸のリンク機構の足とロール軸にサーボモータを使用しての片足 自由度3のロボットです。 歩行動作まで確認したのです...
電子工作 2025.3.16 お父ちゃん ![]()
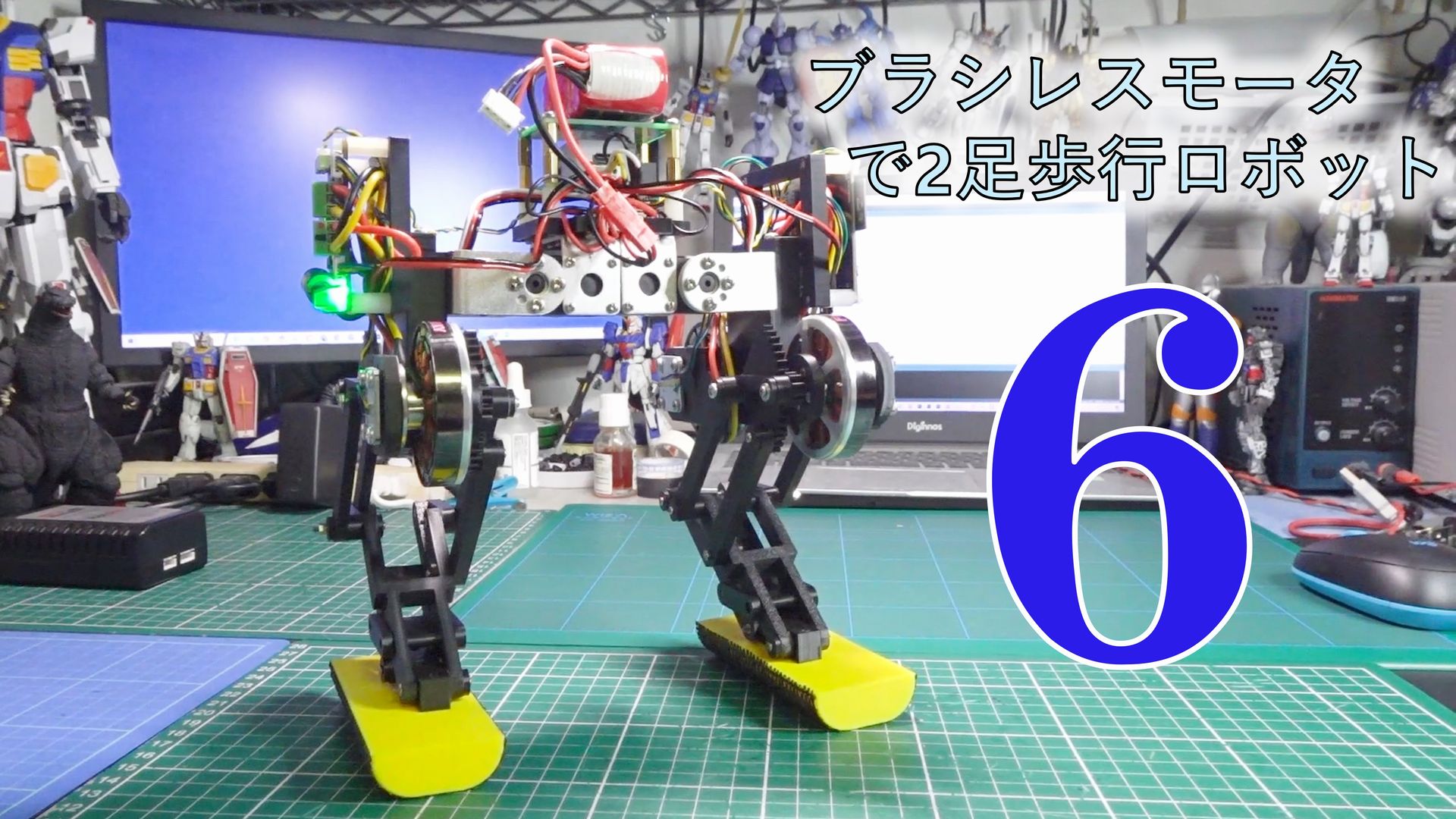
ブラシレスモータで2足歩行ロボット6 ー 足上げ歩行動作 ー
前回は2足歩行ロボット検討を再開してロール軸追加の3自由度ロボットを製作しました。 https://homemadegarbage.com/robottrip07// 基本動作を確認してなんとか歩行もできました。 次は足裏かまぼこリベンジだな pic.twitter.com...
電子工作 2025.3.13 お父ちゃん ![]()
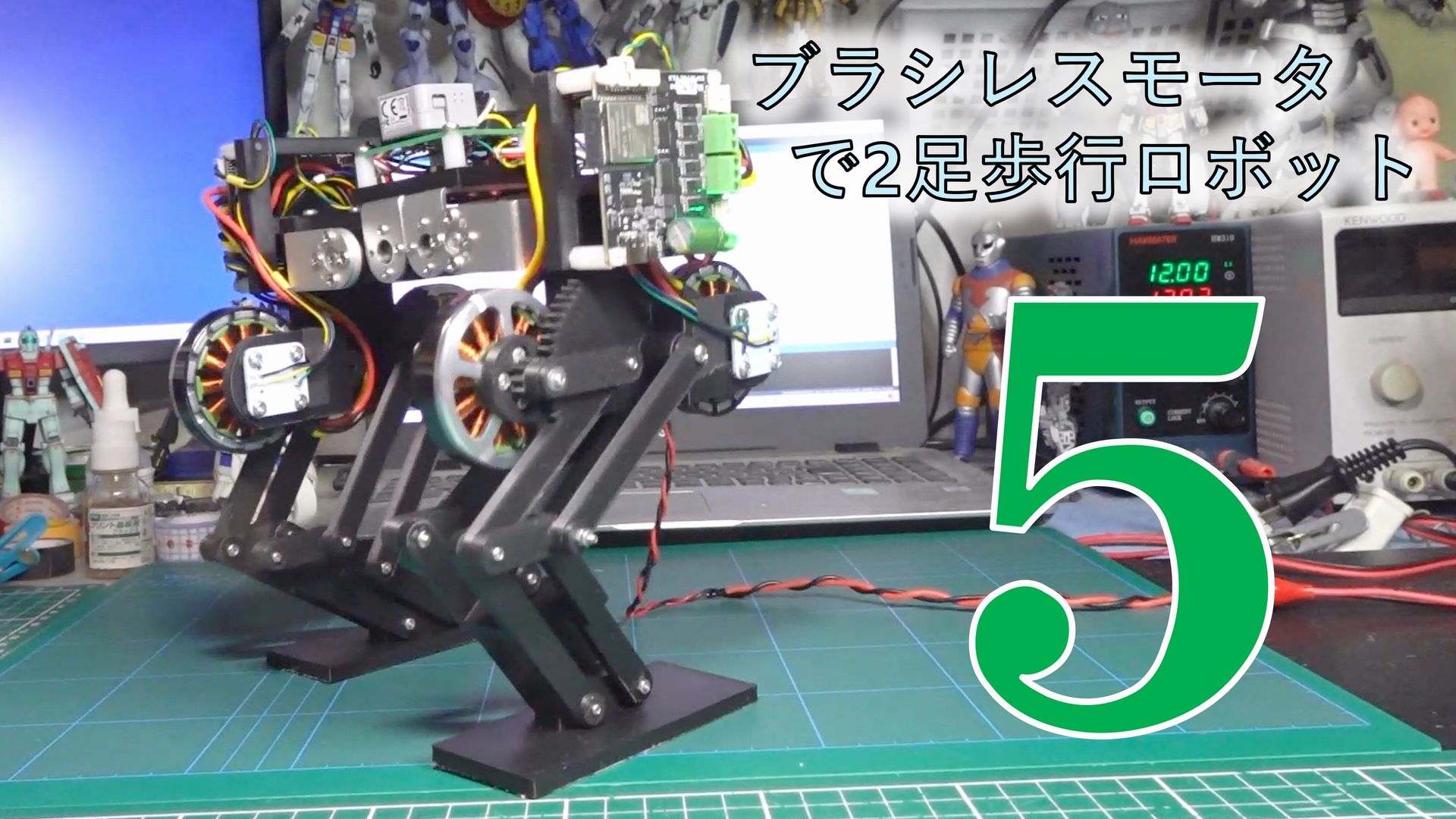
ブラシレスモータで2足歩行ロボット5 ー ロール軸導入 ー
再びブラシレスモータサーボによる2足歩行ロボットの研究に舞い戻ります。 前回はバランス動作の確認を実施しましたが、自由度2の簡易的な足のロボットでは動作にかなり制限があることが大きな実感として理解できました。 https://homemadegarbage.com/robottrip06// ...
電子工作 2025.3.10 お父ちゃん ![]()
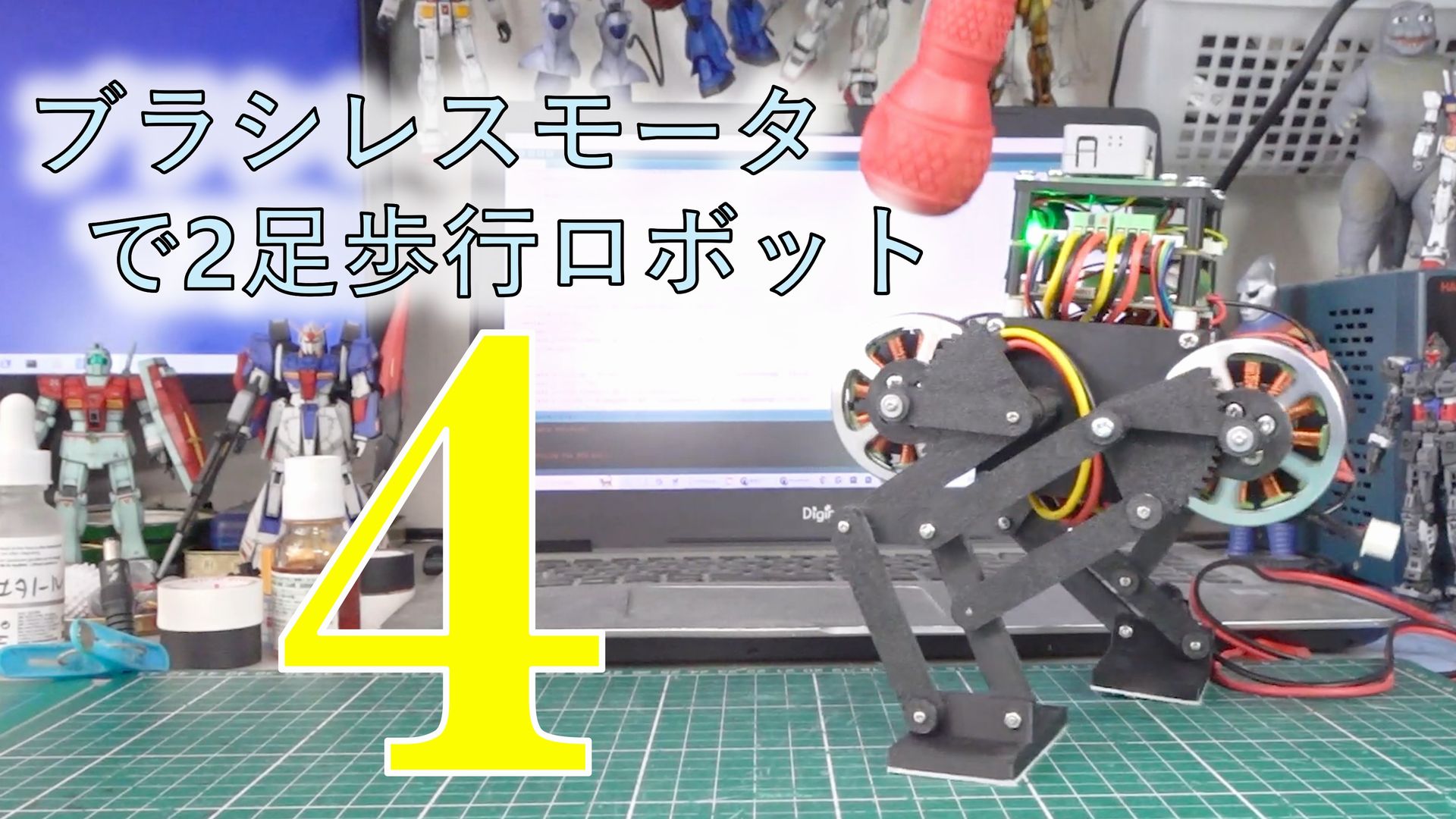
ブラシレスモータで2足歩行ロボット4 ー バランス動作 ー
前回はブラシレスモータサーボによる2足歩行ロボットの歩行やジャンプ動作を確認しました。 https://homemadegarbage.com/robottrip05/ これまでは前後に転ばないように足先をブレード状に長くして動作確認しました。 ここではブラ...
電子工作 2025.2.22 お父ちゃん ![]()

ブラシレスモータで2足歩行ロボット3 ー 基本動作 ー
前回はブラシレスモータサーボによる2足歩行ロボットを完成させました。 https://homemadegarbage.com/robottrip04/ ここでは色々動作確認実施しましたので報告いたします。 初期動作確認 以下は足の座標をPS4コントロー...
電子工作 2025.2.18 お父ちゃん ![]()