
NEWS
- 2025年12月01日 今年もやるで! HomeMadeGarbage アドベントカレンダー2025 NEW
- 2025年10月04日 HomeMadeGarbage the GARAGE 2025 開催しました
- 2024年12月01日 毎年恒例! HomeMadeGarbage アドベントカレンダー2024
- 2024年09月21日 HomeMadeGarbage the GARAGE 2024 開催しました
- 2024年05月13日 フリー画像サイトを公開しました
- 2024年05月01日 家庭内つぶやきサイト「Trash」を公開しました!
- 2024年02月29日 SPRESENSE 活用コンテスト ロボット部門 最優秀賞 & クレイン電子 アドオンボード特別賞 受賞
- 2023年02月01日 フリーBGM(2023年)のアルバムを配信しました
- 2023年12月01日 お待たせいたしました! HomeMadeGarbage アドベントカレンダー2023
- 2023年10月14日 HomeMadeGarbage the GARAGE 2023 開催しました
- 2022年12月01日 今年もやります! HomeMadeGarbage アドベントカレンダー2022
- 2022年10月14日 SPRESENSE 活用コンテスト IoT部門 優秀賞受賞
- 2022年10月07日 『HomeMadeGarbageの仕組みシステムRADIO』 配信開始
- 2022年09月03日 HomeMadeGarbage the GARAGE 2022 開催しました
- 2021年12月01日 今年もやります! HomeMadeGarbage アドベントカレンダー2021
- 2021年11月27日 ブログにNEWS欄を追加しました。
- 2021年11月26日 YouTube生配信!「姿勢制御装置 4段倒立 記録会」
- 2021年11月23日 みんなのラズパイコンテスト2021 優秀賞受賞




最新記事

久々にPOVってみた
久々に POV (Persistence of Vision) バーサライタ を楽しみましたので報告させてください。 my master pic.twitter.com/aZ6294heh5 — HomeMadeGarbage (@H0meMadeGarbage) July 8, 202...
電子工作 2026.7.19 お父ちゃん ![]()
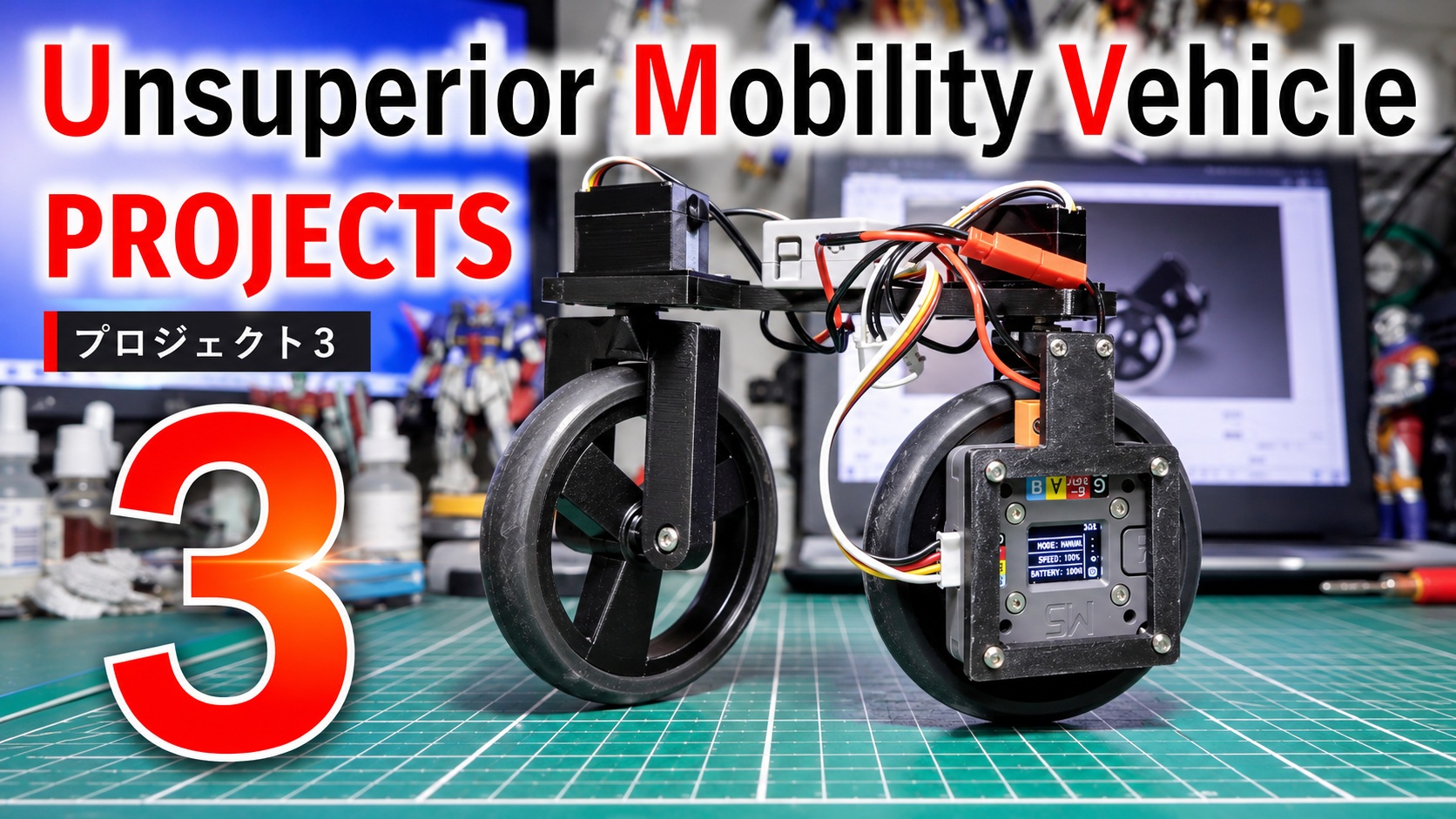
Unsuperior Mobility Vehicle プロジェクト3
以下のすごいロボに憧れて。。 In this demo, Ultra Mobile Vehicle (UMV) drives, turns, jumps, tricks, and comes to a sudden stop called a track-stand. All of the d...
電子工作 2026.7.15 お父ちゃん ![]()

DYNAMIXEL シリアルサーボ XL330 車輪倒立振子の製法
DYNAMIXEL XL330-M077-T を使った2輪の倒立振子ロボットの製法を記載します。 IMU内蔵のマイクロコントローラ Atom Matrix で機体姿勢を検知し、左右の XL330 をカレント制御して倒立します。 Atom Matrix が Wi-Fi アクセスポイントになり、スマ...

PWMマイクロサーボで2足歩行ロボット
前回はPWMマイクロサーボ PTK7465のSim.モデルをこしらえて、2足歩行ロボの歩行動作を検証しました。 https://homemadegarbage.com/servomodel01/ ロボのSim.モデルをもとにAIエージェント Codexで最適動作を探索して実機で検証しました。 ...
電子工作 2026.6.30 お父ちゃん ![]()
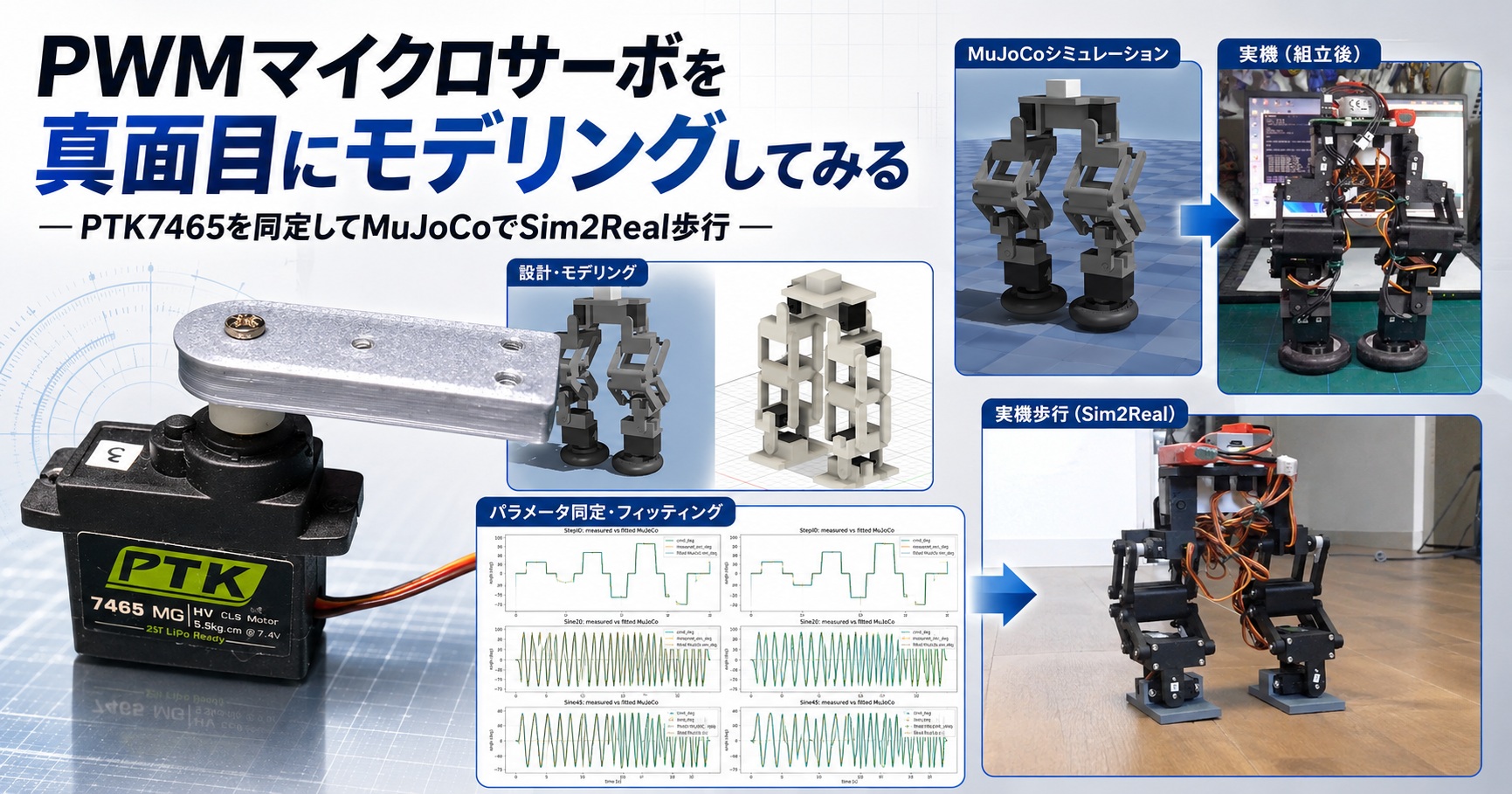
PWMマイクロサーボを真面目にモデリングしてみる — PTK7465を同定してMuJoCoでSim2Real歩行 —
最近はAIエージェント Codexを使って方針や報酬設計丸投げの強化学習にハマっています。 PWMマイクロサーボを用いたロボでも結果が出ており大変に満足しております。 https://homemadegarbage.com/rl13// https://homemadegarbage.com/...
電子工作 2026.6.28 お父ちゃん ![]()
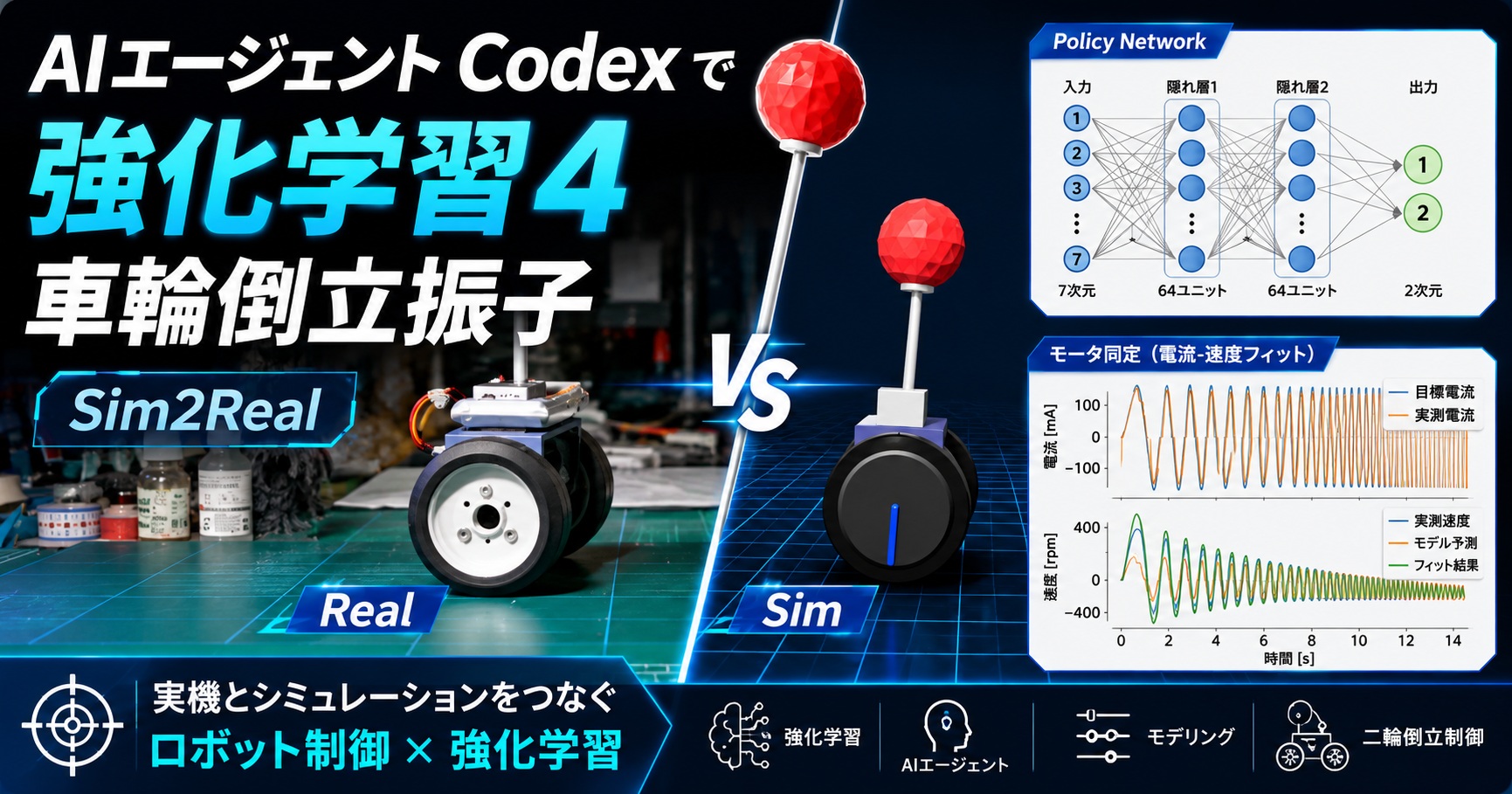
AIエージェント Codex で 強化学習4 車輪倒立振子
最近はCodexを当たり前のように使って生活しており、 わざわざ "AIエージェント Codex を使ってます" なんてことを言うのも今回が最後になるのではないでしょうか? ここでは以前挑戦したゲームコントローラで操作する倒立振子の強化学習に再挑戦します。 ROBSTRIDE 05 倒立...
電子工作 2026.6.23 お父ちゃん ![]()

AIエージェント Codex で 強化学習3 起き上がり4脚ロボット
前回はAIエージェント Codex で簡素な2軸の起き上がりロボの強化学習を実施いたしました。 https://homemadegarbage.com/rl13// 簡単なPWMサーボでも強化学習によって見事な起き上がりロボになりました。 フィジカルAIって、心を鬼にしないといけない...
電子工作 2026.6.15 お父ちゃん ![]()

AIエージェント Codex で 強化学習2 起き上がりロボ
前回はAIエージェント Codexに強化学習を実施してもらい2足歩行ロボットのバランス動作を実現しました。 https://homemadegarbage.com/rl12// Codex先生が学習の環境構築、報酬設計、学習フローすべて考えてくださり、長年憧れていた動作ができました。 C...
電子工作 2026.6.11 お父ちゃん ![]()

AIエージェント Codex で 強化学習2足歩行ロボット HM-01
最近はAIエージェント Codexをさわって色々楽しませていただいております。 今回はCodexで強化学習を楽しみましたので報告いたします。 テーマとして2足歩行ロボットのバランス動作を選択しました。 これまた生活変わるレベルで驚かされました。 2足歩行ロボットの強化学習...
電子工作 2026.6.9 お父ちゃん ![]()

連続回転サーボで車輪倒立振子
今年(2026年)に入ってから倒立振子ばかり作っております。 https://homemadegarbage.com/bala34/ この過程でどんなモータでもどんな構成でも使える倒立メソッドを確立することができました (気のせいかもしれないが)。 モータに関してはDCモータ、サーボモータ、B...

AIエージェント Codex で ドローン2MuJoCo で シミュレーション
前回はAIエージェント Codex を活用してドローンの学習を開始しました。 https://homemadegarbage.com/drone04/ Codex先生のおかげで姿勢制御やゲームコントローラによる位置制御を数日で実現できてしまいました。 Codex先生にドローン制御コー...

AIエージェント Codex で ドローン
AIエージェント Codex を活用して車輪倒立振子の制御システム構築を成し遂げました。 https://homemadegarbage.com/codex03/ 現代技術の恩恵を十分に浴びることができたと感じました。 しかし倒立振子はいろいろなモータや構成で作りに作りまくっており、成熟した俺...

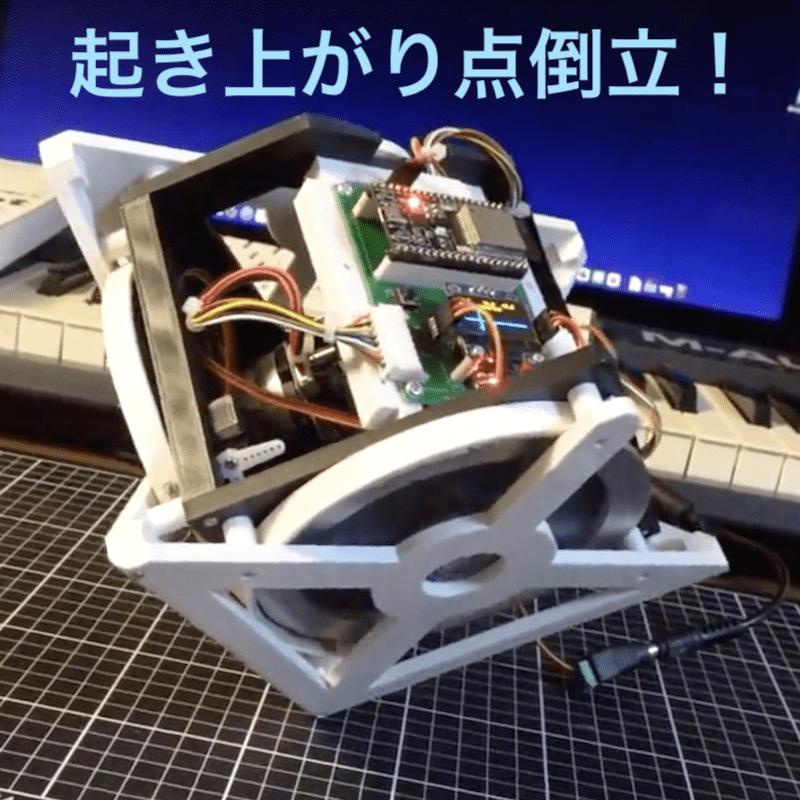
リアクションホイール倒立振子 SHISEIGYO-3 N1 使用法
3軸リアクションホイール倒立振子 SHISEIGYO-3 N1 の使用法を紹介させていただきます。 SHISEIGYO-3 N1 実機を以下で販売中です。是非ご検討ください。 https://shop.homemadegarbage.com/product/s-3-n1/ ...
電子工作 2026.5.18 お父ちゃん ![]()
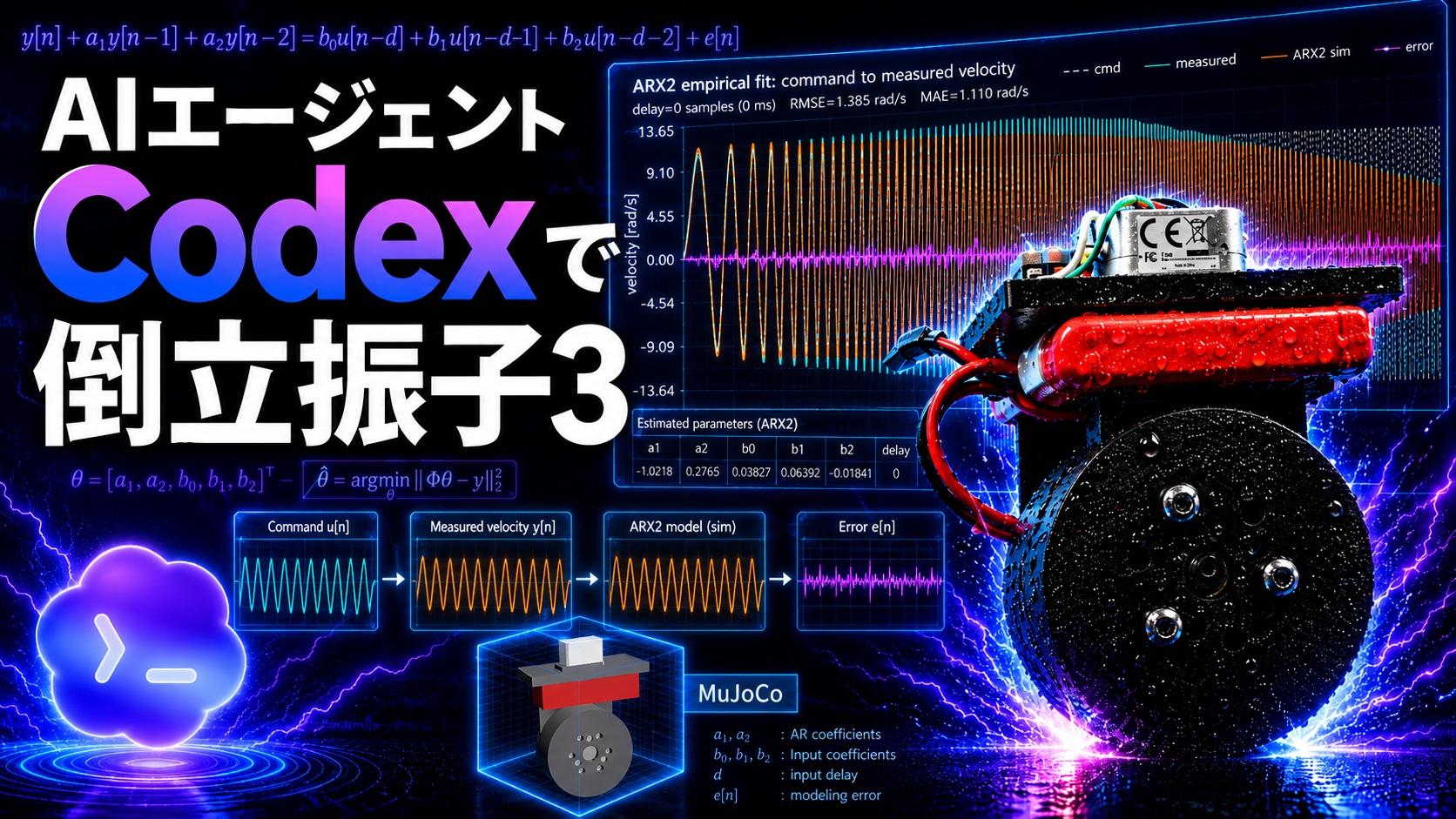
AIエージェント Codex で 倒立振子3 ーモータモデルの同定手法を確立ー
前回は Codex に倒立振子の制御そのものを考えてもらい、見事実機でも素晴らしい倒立制御が実現されました。 https://homemadegarbage.com/codex02 AIエージェントによるバイブコーディングで倒立振子の動作実現は無理であると考えていたため、非常に驚きました。 C...

AIエージェント Codex で 倒立振子2ーバイブコーディングで倒立動作ー
前回はAIエージェント Codex に初めて触れ、そのコード生成の精度に大変驚かされました。 https://homemadegarbage.com/codex01 倒立振子の倒立動作を指示してコーディングしたり、起き上がり動作をさせて動作ログからパラメータ調整するコードも生成して実機動作を確認...
