シリアルサーボでロボットアーム -シリアルサーボと距離を詰めたい俺2-
本記事にはアフィリエイト広告が含まれます。
憧れのシリアルサーボ (近藤科学 KRS-3301) を入手し、前回はじめて動作させました。
ここではシリアルサーボでロボットアームを製作しましたので報告いたします。
ロボットアーム
前回の連動動作を拡張させてロボットアームとそのコントローラを製作してみました。
シリアルサーボ最高ですわ
人生変わりそうですわ pic.twitter.com/cXDzMYwho8— HomeMadeGarbage (@H0meMadeGarbage) December 30, 2021
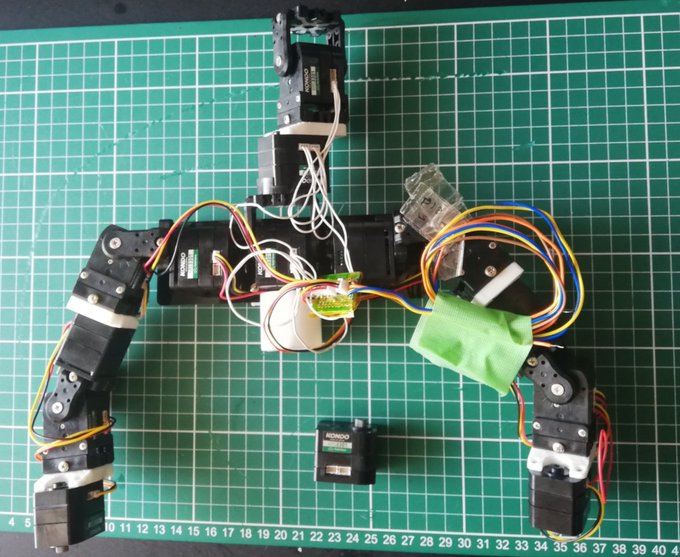
ロボットアームとコントローラはそれぞれ3軸で構成しました。
サーボのIDは以下の通り

コードのメイン部は以下の通り (ArduinoサンプルコードのKrsServoMasterSlaveを参考)、
たったこれだけでロボットアームとコントローラができてしまいました。
|
1 2 3 4 5 6 7 8 |
id1Pos1 = krs.getPos(6); //角度取得コマンドでID6サーボの角度入手 krs.setPos(7,id1Pos1); //ID7にID6で受け取ったポジションデータを書き込み id1Pos2 = krs.getPos(9); //角度取得コマンドでID9サーボの角度入手 krs.setPos(3,id1Pos2); //ID3にID9で受け取ったポジションデータを書き込み id1Pos3 = krs.getPos(1); //角度取得コマンドでID1サーボの角度入手 krs.setPos(8,id1Pos3); //ID8にID1で受け取ったポジションデータを書き込み |
配線もマルチドロップ接続で非常にスッキリしています。
おわりに
シリアルサーボによってロボットアームとコントローラが簡単に作成できました。
これまではPWMサーボと可変抵抗でマスタースレーブ動作を実現しておりました。
自作ロボットアームを自作コントローラで制御#電子工作 #DIY
🔽詳細はコチラhttps://t.co/10O5uTnqBy pic.twitter.com/u7WMr2Z6Ap
— HomeMadeGarbage (@H0meMadeGarbage) March 2, 2021
二足歩行ロボットとそのコントローラ#MFTokyo2021 #作品発表 #ロボティクス #とってもロボットくん
予算1万円でつくる二足歩行ロボット (I/O BOOKS) を Amazon でチェック! https://t.co/vR6oYKbgTW
☟詳細はコチラhttps://t.co/i4NSa0APg7 pic.twitter.com/vqg6tbBoV2
— HomeMadeGarbage (@H0meMadeGarbage) October 3, 2021
こちらも安価で実現できて良いのですが、コードが若干複雑になり配線も多くなります。
改めてシリアルサーボのご利益を大きく感じました。
更に勉強を進めていきます。
また次回お会いいたしましょう。