SHISEIGYO-1 Walkerを実現させたい俺4 ー歩行検討2ー
本記事にはアフィリエイト広告が含まれます。
前回は足の座標からバランスする姿勢角を算出しての制御を確認いたしました。
ここでは歩行動作の最終調整を実施いたしました。
目次
機体調整
これまでいじってきて改善点が見えてきましたのでもろもろ調整
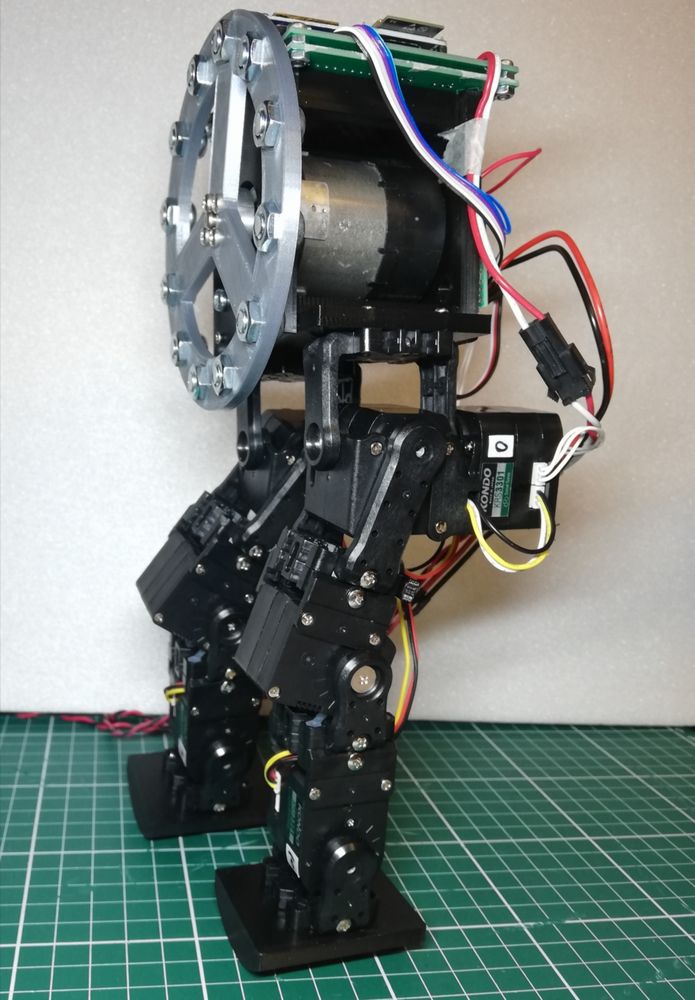
ホイール変更
足をより曲げれるようにホイール径を小さくしました。
フレームを3Dプリントしてナットで重さを追加します。
足を前方に出すときに
ホイールに当たるので
径を縮めるべく3Dプリントホイールとナットで構成 pic.twitter.com/EykYmhFVGm— HomeMadeGarbage (@H0meMadeGarbage) January 26, 2022
アルミホイール(2枚重ね) 直径 120mm、重さ124g
から
直径 106mm、重さ91gのホイールになりました。
足の調整
ホイールの径と重さの減少によってトルクが落ちましたので
足をなるべく低くするべく、
足先ピッチのアームを26mmから20mmに変更しました。
動作
リアクションホイールの制御ゲインも調整し動作バッチリです。
以下実施して前後動作
・足の構成調整
・フライホイール変更
・ホイール制御ゲイン調整 pic.twitter.com/BqNsdKtCrC— HomeMadeGarbage (@H0meMadeGarbage) January 26, 2022
歩行検討
前回検討した足座標からバランス姿勢角をオフセットさせる手法を歩行に応用しようと思いましたが、天板を下げる方向にはオフセットできるが上げる方向にはサーボトルク不足で出来ないため今回は見送りました。
重心移動は 倒立角動的再調整システム (IDRS)で踏ん張ってもらうことにします。
歩行シーケンス
以下のシーケンスを組んで歩行動作を実現しました。
- 重心を前方に移動
- 後ろ足を上げて前に移動
- 後ろ足をさらに前に出して歩行ラインに接地、同時に前足を下げる
- 重心を前に移動
- 足を逆にして上記を繰り返す
IDRSによる自律的重心移動もうまくいっております。
おわりに
リアクションホイールを用いたオートバランスによる歩行を確認することができました。
しかし課題はまだ多く、早い歩行は難しい状況です。
課題は以下の通り
- サーボのトルク不足
シリアルサーボでトルクの大きいものを購入となるとかなりの出費です。。
安価なPWMサーボでいつか検証しようと思います。
足のサーボのトルク不足が解消されれば、リアクションホイールのトルクも大きくでき、バランス安定度や重心移動精度が増し高速歩行も可能であると考えております。
よいサーボモータを入手次第また報告いたします。
またお会いいたしましょう!
次の記事

関連記事
 SHISEIGYO-1 Walkerを実現させたい俺1 ーキックオフー
SHISEIGYO-1 Walkerを実現させたい俺1 ーキックオフー
 SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
 SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
 SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
 SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー
SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー
 SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
 SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー