二足歩行ロボット SHISEIGYO-1 Walker 参 改 3
本記事にはアフィリエイト広告が含まれます。
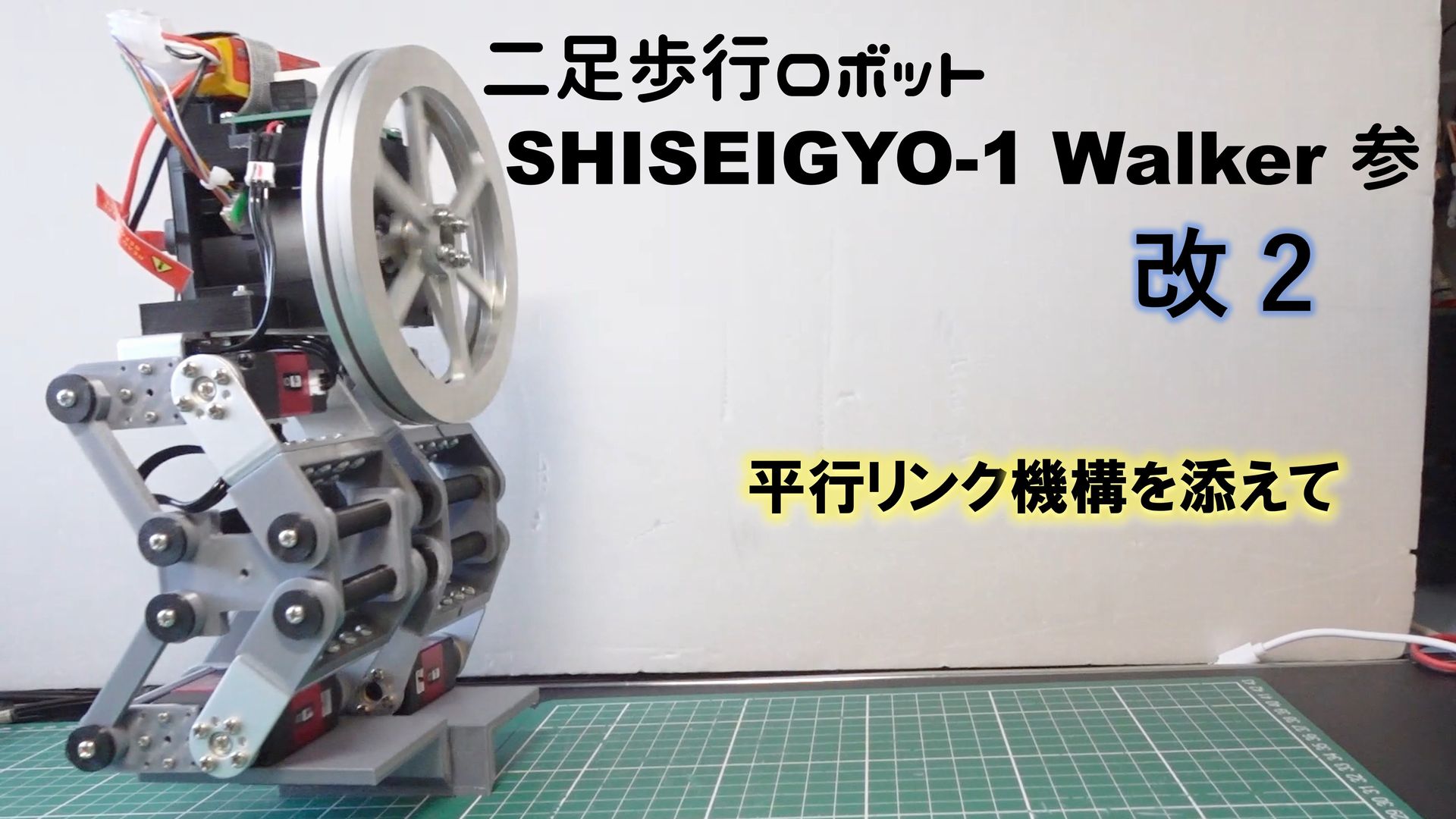
前回はSHISEIGYO-1 Walker 参 改 の足に平行リンク機構を導入しサーボ削減しての歩行動作を確認しました。
ここでは、通常の足に戻して再度歩行動作の検証を行いました。
目次
足のサーボ配置変更
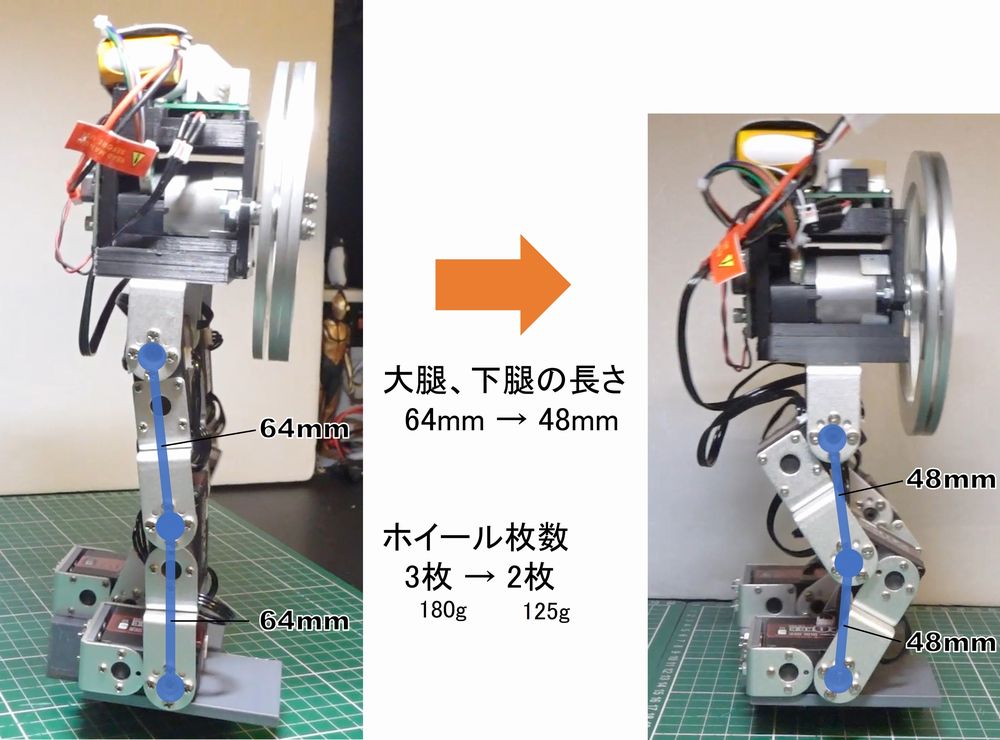
足のサーボモータX-244の配置構成を変更して直立時の高さを32 mm低くしました。
高さ低減に伴って必要トルクも減るので、フライホイールの重量も減らしました。
動作
直立時の足の高さを下げたことにより、安定性が増しました。
倒立時の必要トルク低減のためにホイールの軽量化をしたことも安定性向上に寄与していると考えます。
もっと小型でハイパワーのサーボを用いれば、スマートな足になると思います。
おわりに
ここでは足のサーボの配置を変更し直立時の高さを低減して、安定性の向上をはかりました。
二足歩行ロボット 足踏み pic.twitter.com/ZDQeZFdQuf
— HomeMadeGarbage (@H0meMadeGarbage) February 23, 2023
もう少し小型でパワーのあるサーボを探して試してみたいなと考えております。
家でロボットに歩かれると本当にジャマだ pic.twitter.com/v29xASLLne
— HomeMadeGarbage (@H0meMadeGarbage) February 24, 2023
追記
歩行動作各種検討 (23/2/26)
二足歩行ロボット
小走り2 pic.twitter.com/IWiTp8GppH— HomeMadeGarbage (@H0meMadeGarbage) February 26, 2023