二足歩行ロボット SHISEIGYO-1 Walker 参 改 4
本記事にはアフィリエイト広告が含まれます。
これまでSHISEIGYO-1 Walker 参 の改良版についてはマイコンを2台使用して制御していたが、今回削減をはかったので報告します。
目次
従来システム構成
以下がこれまでのSHISEIGYO-1 Walker 参 改 のコントローラシステム構成です。
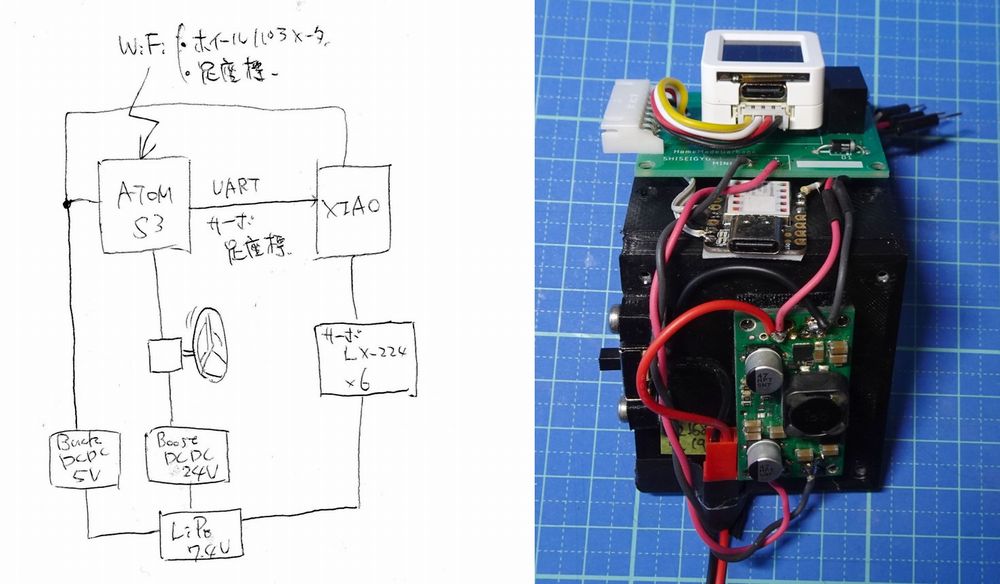
ATOMS3でフライホイールを制御し、Seeed XIAOで足のサーボモータLX-224 (6個)を制御していました。
新規システム構成
以下が今回の構成です。
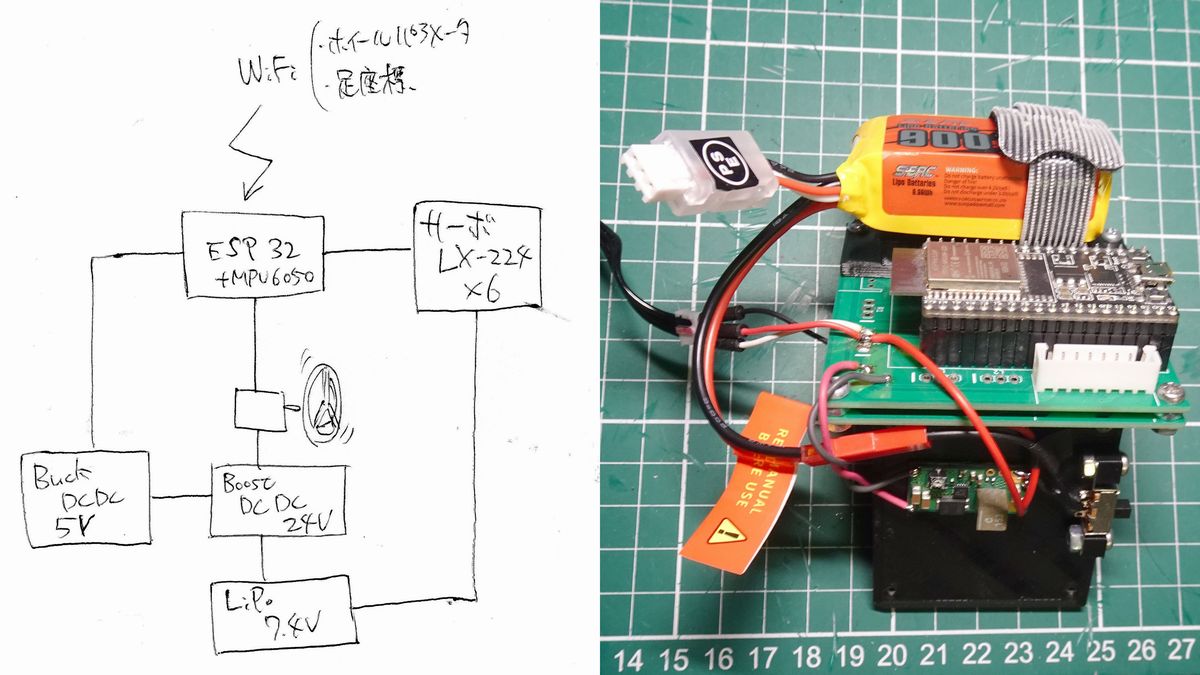
ESP32の評価ボード1台でホイールと足のサーボモータを制御しています。
ESP32はデュアルコアで使用してそれぞれのコアでフライホイールとサーボを制御します。
各コアでの初期設定の振り分けにも注意を払いました。
IMUとしてはMPU6050を使用しました。
LiPoバッテリは従来とおり2セルの7.4Vのバッテリを使用。
モータ駆動用の24Vを生成するDCDCモジュールは従来のS18V20F24が価格が高騰し更に入手が困難になってしまったため、同じ石が載っている低価格な以下のモジュールを採用しました。

動作
新規システム構成で歩行動作の確認を行いました。
新規システムでも問題なく動作しております。
おわりに
ここではマイコンの数の削減と24V DCDCモジュールの低価格化をはかりました。
変更したシステムでも問題なく歩行動作が確認できましたので非常に喜んでいます。
低価格で良いものができたのでお財布にも優しく構成も家庭的になりました。
HomeMadeGarbageの思想に即したシステムが構築できましたので、ここで得た自信を胸に更にまい進したい所存です。