SHISEIGYO-3 DC 量産 ーリアクションホイールへの道68ー
本記事にはアフィリエイト広告が含まれます。
前回は小型コアレスモータを用いて3軸姿勢制御モジュールを実現しました。
ここでは更にブラッシュアップを施しましたので報告いたします。

目次
基板製作
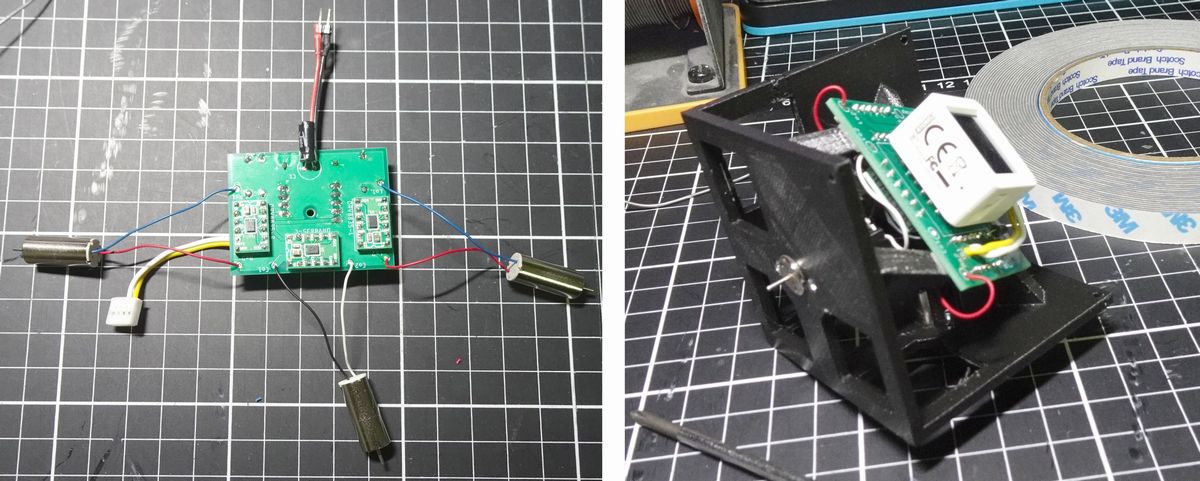
前回は手持ちの基板に空中配線でコントロール基板を構成していました。
容量不足の為 更に増設 pic.twitter.com/DMb53YVkwr
— HomeMadeGarbage (@H0meMadeGarbage) February 22, 2024
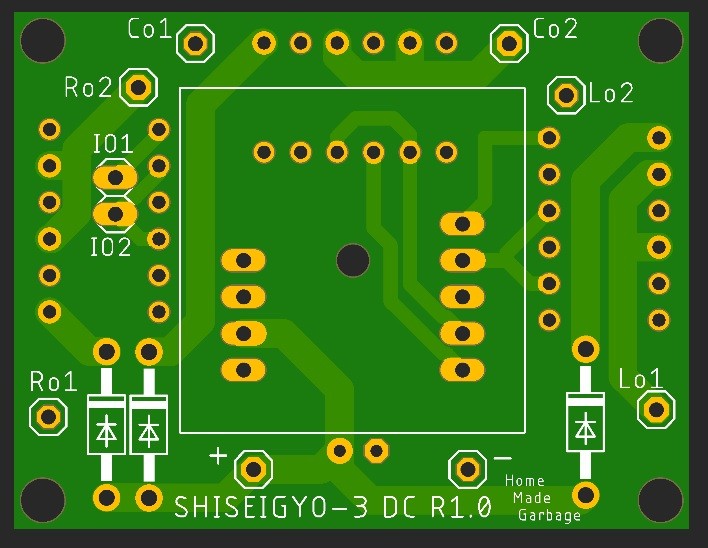
そこでSHISEIGYO-3 DC専用の基板を製作したのですが、ネジ穴を開け忘れてた。。
いまのとこ問題なし pic.twitter.com/1CUtupzY74
— HomeMadeGarbage (@H0meMadeGarbage) March 6, 2024
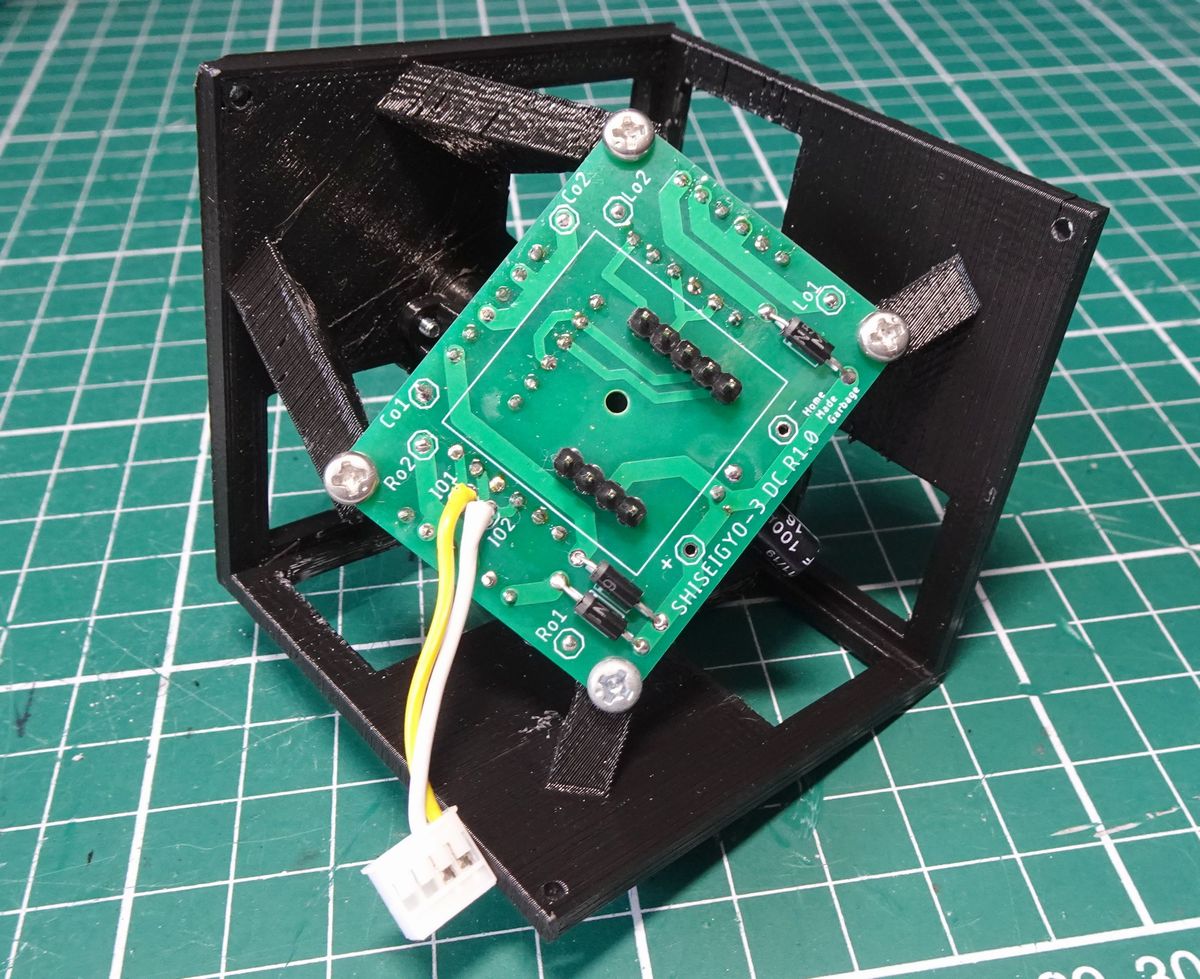
仕方ないので基板は両面テープで固定しました。
配線には全く問題はなく無事に動作しました。
完成
問題ないね
ただただ基板のネジ穴を忘れただけだった。
穴開けて再発注だな pic.twitter.com/tWbS6ssPqO— HomeMadeGarbage (@H0meMadeGarbage) March 6, 2024
早速 ネジ穴開けて再発注
3/7発注の3/16着でまずまずのスピード
基板届いた pic.twitter.com/YAyppqLgPb
— HomeMadeGarbage (@H0meMadeGarbage) March 16, 2024
これで基板を筐体にネジ止め固定できます。
筐体検討
基板と並行して筐体の検討も実施しました。
明日は筐体の再検討を実施しましょう pic.twitter.com/1wPDpt2OHT
— HomeMadeGarbage (@H0meMadeGarbage) March 6, 2024
中身だけでも可愛いのですが、やはりホイールが床などに当たるのが嫌なので外装をつけることに決定しました。
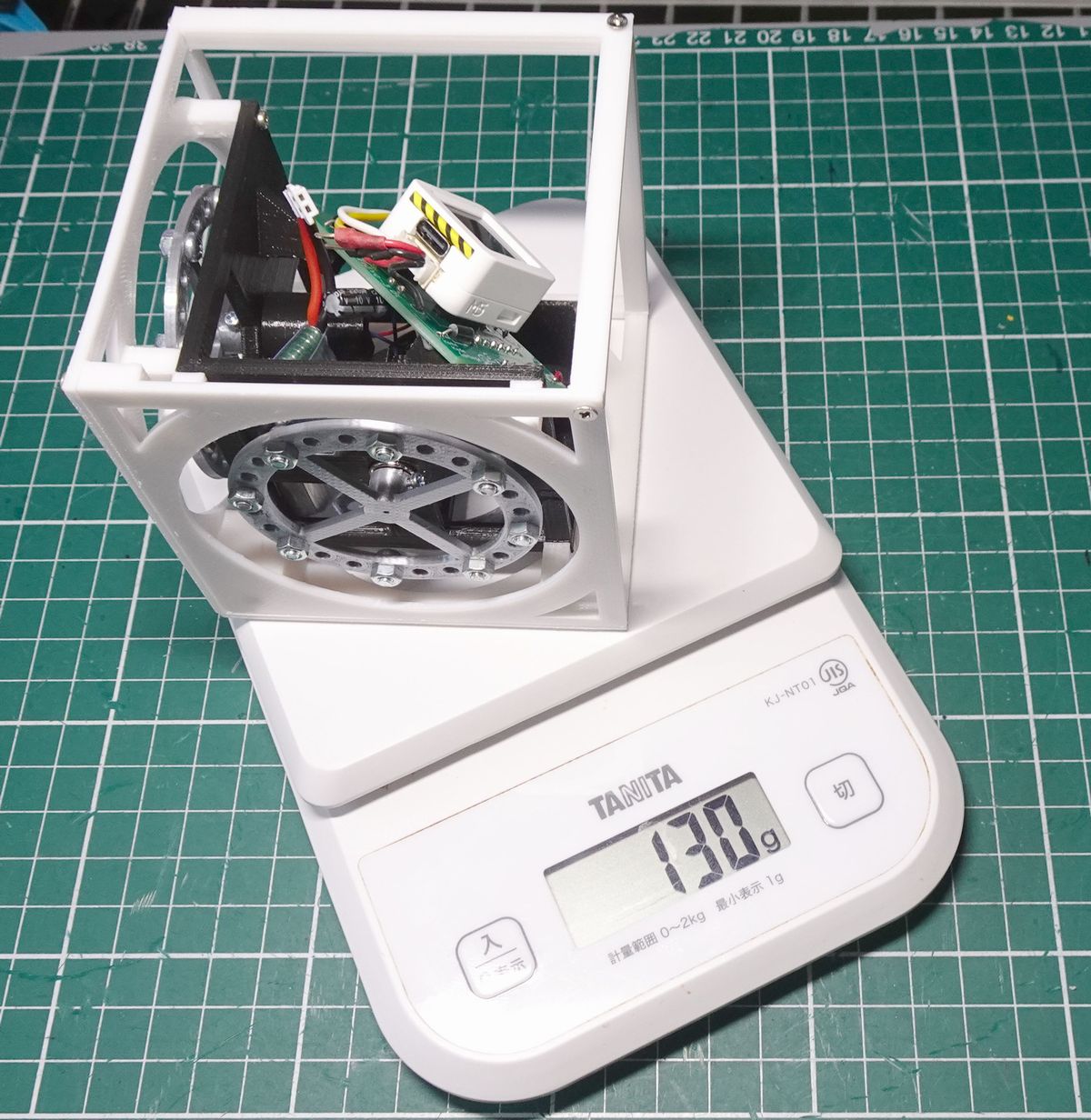
若干外装を肉抜きして完成。
筐体完成 pic.twitter.com/Do5fvYjWFB
— HomeMadeGarbage (@H0meMadeGarbage) March 7, 2024
総重量 130g 。かなり軽量の3軸姿勢制御モジュールを生み出してしまいました。
回転検討
真中のホイールの回転にオフセットを与えることで機体が回転することを確認しました。
もうちょいで回転制御できそうなんだけどな pic.twitter.com/CQMJDN87Mb
— HomeMadeGarbage (@H0meMadeGarbage) February 25, 2024
ただオフセットを与えるだけでは筐体回転を自由自在に制御できません。
はしゃぎ過ぎた pic.twitter.com/d878s4cA1i
— HomeMadeGarbage (@H0meMadeGarbage) February 26, 2024
そこで真中のホイールの回転に与えるオフセット量に機体の回転角速度をフィードバックさせてみたところ。。。
回転制御できるようになたよ
ヨ―角速度フィードバック(P制御)でいけた pic.twitter.com/SXpXFKUZJQ— HomeMadeGarbage (@H0meMadeGarbage) March 14, 2024
自由自在に思ったように回転を司れるようになりました!
回転制御のために角速度フィードバック導入したので、回転なし(角速度ゼロ指定)のときに指で回そうとしても頑なにまわろうとしません。当然ですが。
ちょっと可愛げがない気がするのでフィードバックON/OFFは切り替えれるようにしようと思います。
回転制御のために角速度フィードバック導入したのだけど、回転なし(角速度ゼロ)のときに指で回そうとしても頑なにまわろうとしない(あたりまえだが)。
可愛げがない気がするのでフィードバックON/OFFは切り替えれるようにしよう pic.twitter.com/FtZHFeFGf0— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2024
おわりに
ここでは3軸姿勢制御モジュール SHISEIGYO-3 DCのブラッシュアップを実施しました。
専用基板と筐体をFIXし、さらに回転制御も実現しました。
試行錯誤を繰り返し改善を目指すうちにSHISEIGYO-3 DCを量産してしまいました。
誰がこんなたくさんの倒立キューブに囲まれると思いまっか pic.twitter.com/56JfC0jQDM
— HomeMadeGarbage (@H0meMadeGarbage) March 16, 2024
今回 SHISEIGYO-3 DC という小型で軽量の3軸姿勢制御モジュールを実現したことによって私の世界観は大きく広がったと思います。
3軸姿勢制御モジュールは重いし難しいからという理由であきらめていた表現が今ここに解放されたのです。
私の世界観
今日はシリアルサーボSCS0009でバク転するロボットができました。あと発注した3軸姿勢制御モジュールの基板が届いたので動作を確認しました。無事動いて楽しかったです。でも基板のネジ穴を開け忘れたところが嫌でした。明日も休みなので大暴れしたいです。 pic.twitter.com/iX4tFjuD4G
— HomeMadeGarbage (@H0meMadeGarbage) March 6, 2024
4脚ロボットの上に小型3軸姿勢制御モジュールを載せました。 pic.twitter.com/76ryRMatjk
— HomeMadeGarbage (@H0meMadeGarbage) March 6, 2024
好きな人が優しかった pic.twitter.com/Zz5Dmi7YM5
— HomeMadeGarbage (@H0meMadeGarbage) March 7, 2024
見てこのヌルヌル動くSTS3032
あと上に載ってるヤツ pic.twitter.com/bzXE89Gyhc— HomeMadeGarbage (@H0meMadeGarbage) March 7, 2024
Around The World#PiDay2024 pic.twitter.com/D6vDUJt3zv
— HomeMadeGarbage (@H0meMadeGarbage) March 14, 2024
Physics pic.twitter.com/nByTqB6DKa
— HomeMadeGarbage (@H0meMadeGarbage) March 9, 2024
誰がこんなたくさんのメカトロに囲まれると思いまっか pic.twitter.com/OwuMZhLADV
— HomeMadeGarbage (@H0meMadeGarbage) March 10, 2024
追記
回転制御改版 (2024/3/26)
回転速度指定値を0にした際に自動的に回転速度追従をOFFにする機能を追加しました。
次の記事
関連記事
 6重倒立に向けて③ ーリアクションホイールへの道66ー
6重倒立に向けて③ ーリアクションホイールへの道66ー
 SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
 Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
 シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
試行錯誤が伝わって面白いですね!だんだんコントロールできていくのが興味深いです。