コロコロロボット開発
本記事にはアフィリエイト広告が含まれます。
最近はYouTubeライブ配信に凝っており、これまでは事前に開発した作品の組み立ての様子を配信しておりました。
だいぶ配信にも慣れYouTubeライバーとしての自覚も芽生えてきましたので、今回は開発する様を配信してみようと思い立ちました。
ここではその開発の様子をレポートさせていただきます。
目次
テーマ
球状のケース内に小型の車を仕込んでコロコロ移動するロボットを作りたいと思います。

ケースは直径7cmほどで クレーンゲームで入手し、中にはチョコがはいっておりました (ところでクレーゲームのアームの力のなさってハンパないよね)。
この時点では明確な方針もなく実現の確度も見積もっていませんでしたが、とにかく配信で開発の様子を流すことを実現するべく動き出しました。

開発1日目
材料
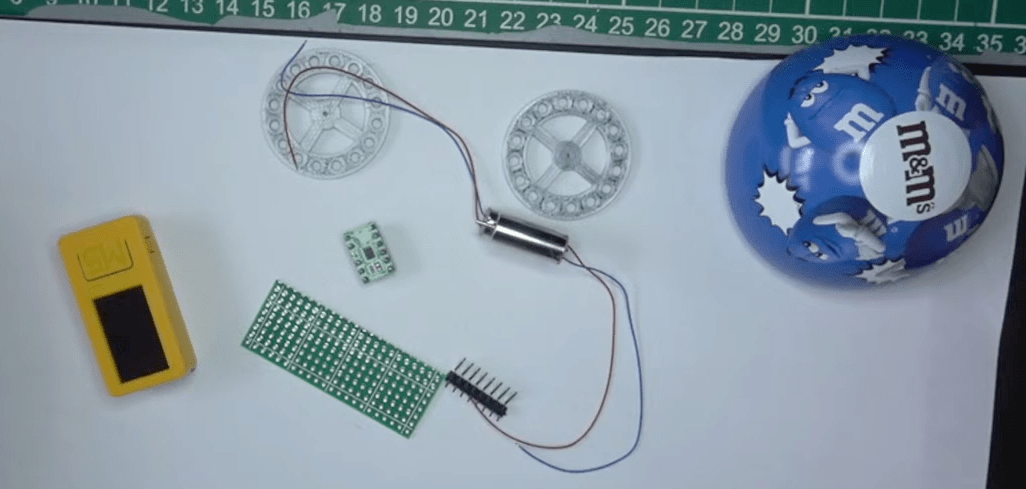
- 球体ケース
- M5StickC Plus2
- コアレスモータ
- モータドライバ DRV8835
基板作製
ユニバーサル基板にモータ駆動部とモータを固定してM5StickC Plus2 と接続します。
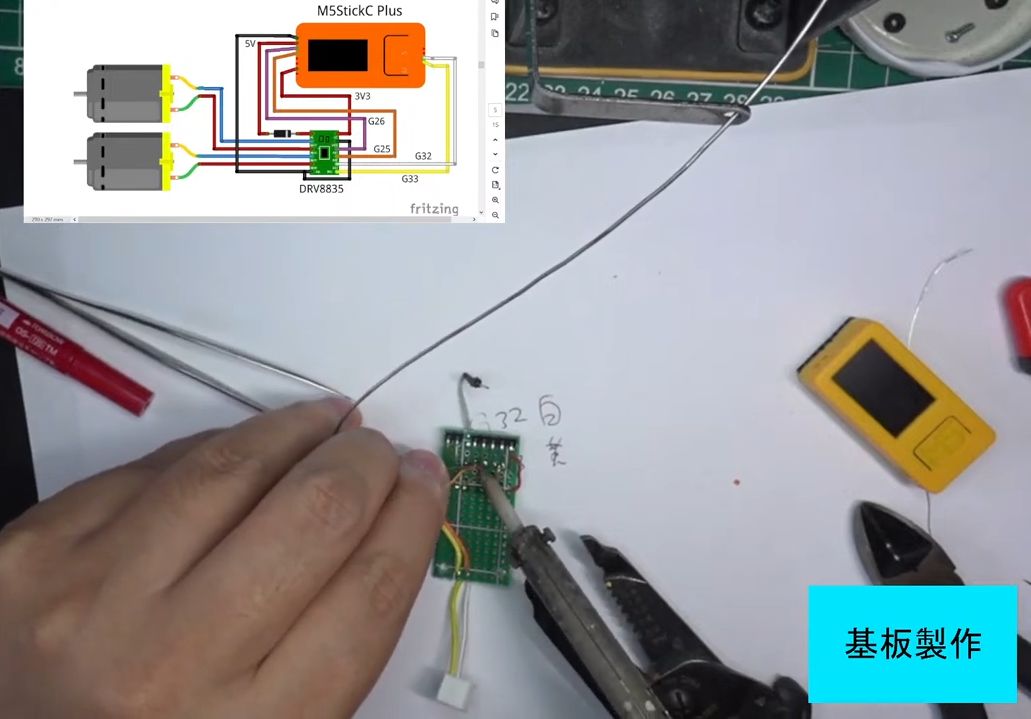
回路構成は以前製作した倒立振子とほぼ同様なので参考にしました。
モータ用の電源にはM5StickC Plus2内蔵のバッテリを直接接続して利用するようにしました。
コーディング
コーディングの様子も配信しました。
コードは基板回路と同様に倒立振子のものを参考にカスタマイズしました。
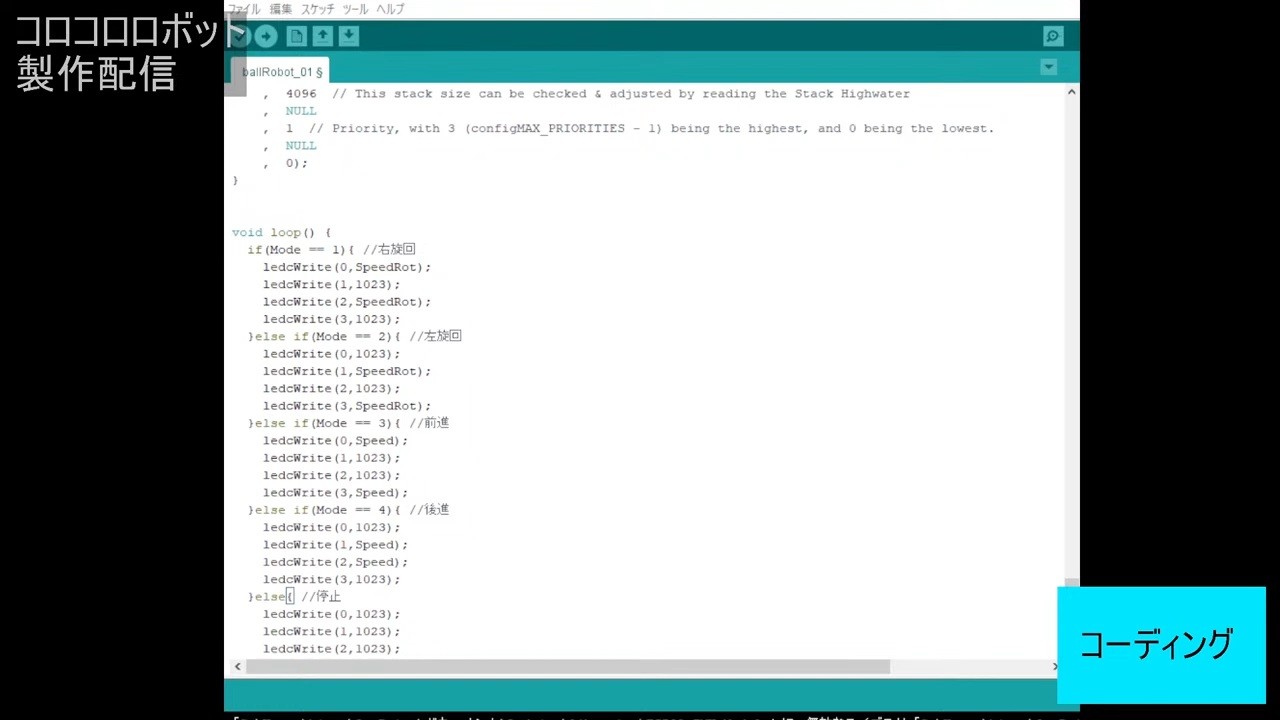
スマホとWiFiを介して接続して前後進や旋回を制御します。
モータ固定治具設計
モータを基板に固定する治具をFusion360で設計しました。
このスピード感よ#fusion360 pic.twitter.com/E3qaU3qpM9
— HomeMadeGarbage (@H0meMadeGarbage) April 17, 2024
問題発生
使用したコアレスモータがかなり電流を喰うのでDRV8835の駆動回路1つでは動かせないことが明確に分かりました。
仕方ないのでここではDRV8835の駆動回路2個をパラにしてコアレスモータを1つ動かすのを確認して1日目を終了としました。
開発時にはこういった問題が必ず発生します。
開発1日目配信動画
開発2日目
モータ変更
モータ2個を駆動できなかったので、小さいものに変更しました。

モータ変更に伴い固定治具も修正

動作確認 しかし…
モータ変更して無事にモータ2個の駆動を確認できたのですが。。
なぁにがコロコロロボットだ pic.twitter.com/L8wprRK3pY
— HomeMadeGarbage (@H0meMadeGarbage) April 18, 2024
ケース内に入れても中でホイールが空転してコロコロとは転がりませんでした。。。
開発って大変ですねぇ( ノД`)シクシク…
開発2日目配信動画
開発3日目
タイヤ検討
タイヤがケース内で空転していたので、滑り止めとしてホイールの側面にTPUフィラメントで出力したシートを貼り付けました。
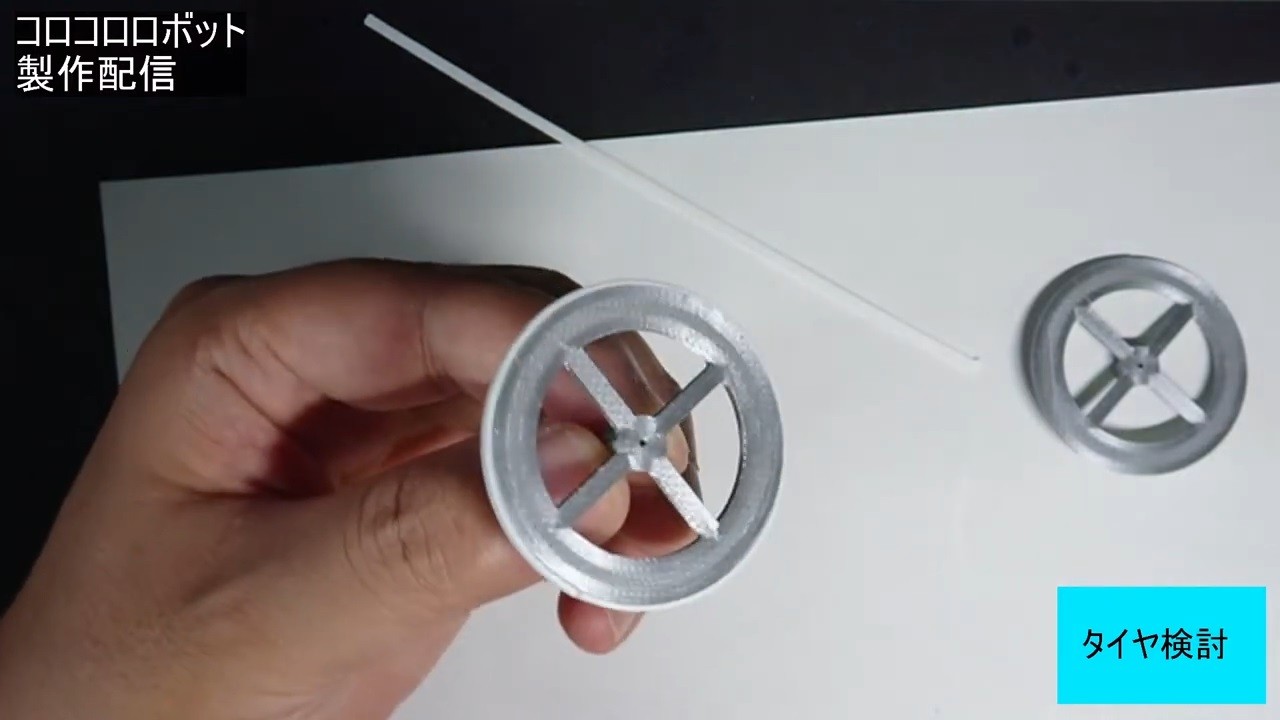
しかしこれでも球体ケースがコロコロと転がることはありませんでした。。
モータのトルクが小さいことも要因として挙げられますがこのケースでコロコロロボット実現は厳しいようです。
モータ変更
ちょっと当初の方針ではコロコロロボットの実現は難しいことがわかりましたので、思い切って方針を変えることにしました。
ホイールを半球状にしたSORA-Q 的なものにすることとしました。
まずはちょっとトルク的に厳しいモータをギアドモータに変更しました。

モータはプラ板と両面テープで基板委固定してタミヤのホイールを接続しました。

動作
タイヤに両面テープで球体ケースを貼り付けてコロコロロボットとしました。
コロコロロボット完成
思い描いた通りにできなかったけど 世の中そんなもんだろ https://t.co/BqlKtwOi5k pic.twitter.com/SHwNgAo9R3
— HomeMadeGarbage (@H0meMadeGarbage) April 19, 2024
開発3日目配信動画
おわりに
ここではコロコロロボットの開発ライブ配信の様子について報告致しました。
開発の全工程をほぼ配信しましたので、問題の発生やその解決策の考察から方向転換まで全て見ていただけたかと思います。
多くの開発において やりたいことと出来ることの狭間で試行錯誤がなされているのではないでしょうか。
また違ったテーマで配信をしたいと思っておりますので、何卒宜しくお願い致します。