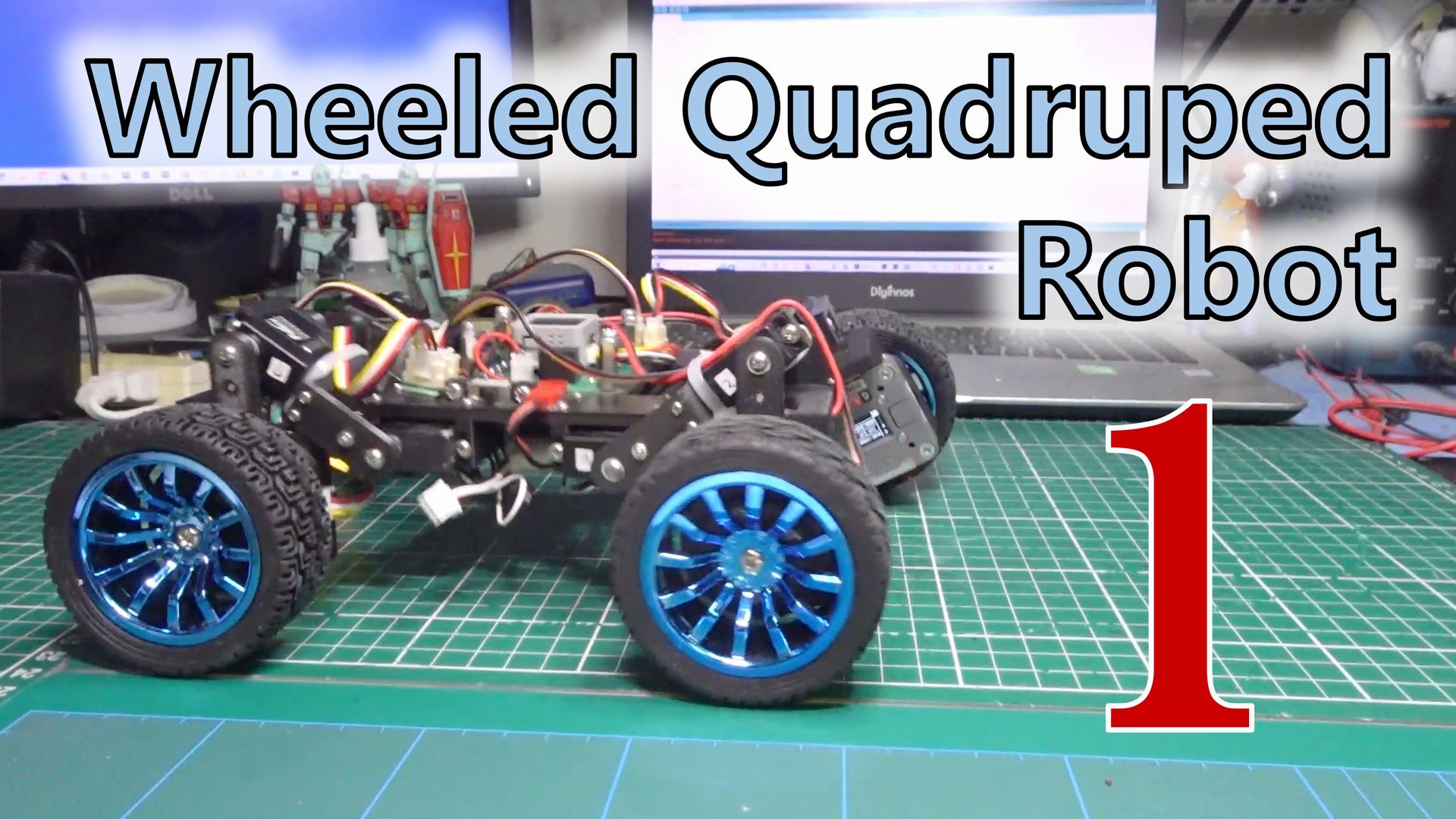
Wheeled Quadruped Robot を作りたい1
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2024 |4日目
足先がタイヤのロボットの製作をたびたび実施しております。
最近は2輪ではありますがRoller485 を使用して非常に良い結果を得ておりました。
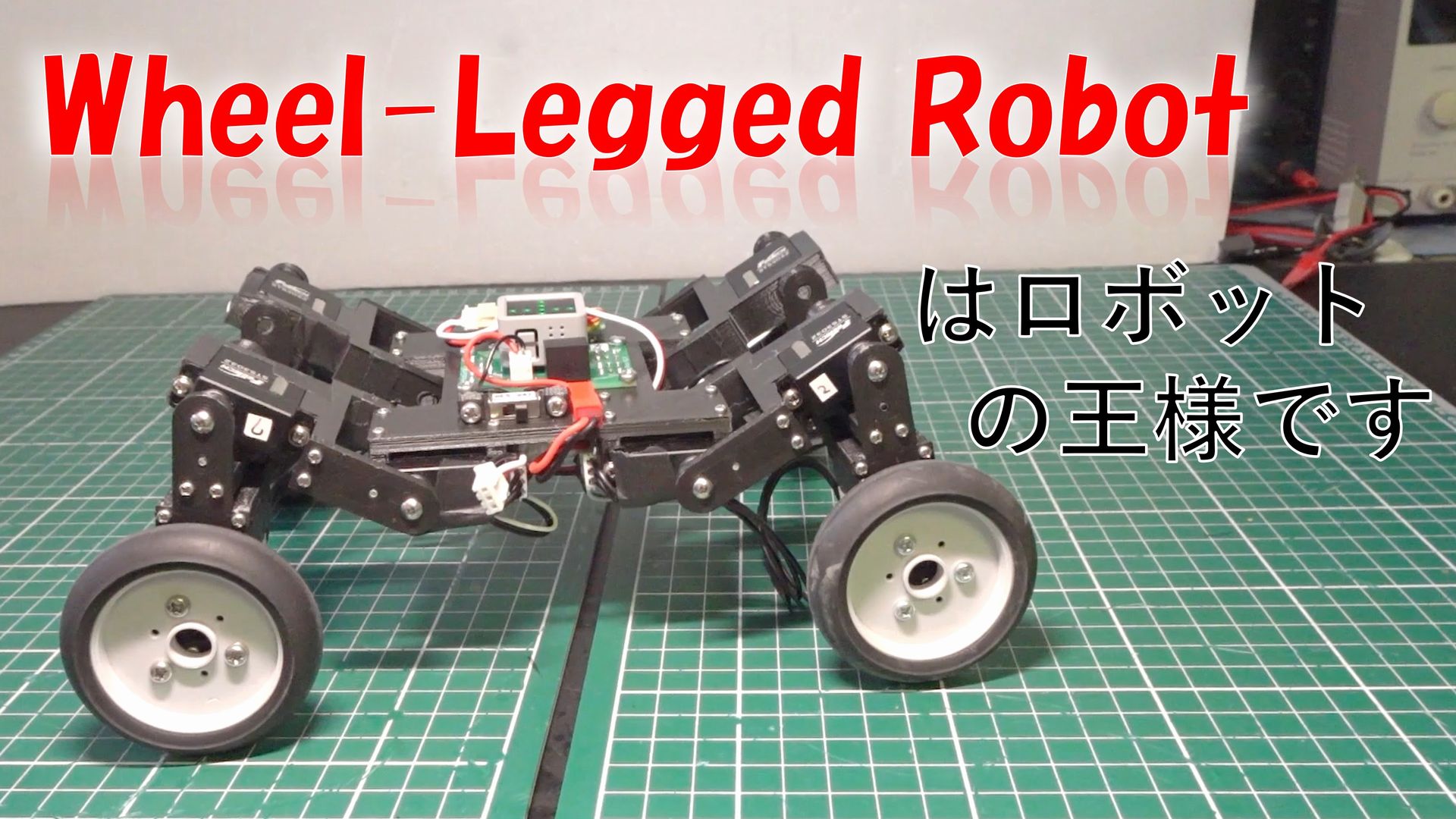
ここではあらめて4輪4脚ロボット “Wheeled Quadruped Robot” の製作を開始します。

目次
Wheeled Quadruped Robot
そもそも4輪の4脚ロボットを一般的になんて呼べばよいのか分からず、アンケートをとってみました。
What do you call this robot?
— HomeMadeGarbage (@H0meMadeGarbage) November 24, 2024
Wheel-legged Robot は2輪の倒立振子ロボットでも使われたりしてるので、
今後はアンケート結果も踏まえて Wheeled Quadruped Robot と総称することとします。
目標
本件の一つ目の目標は4輪にして以下のようにスッと直立させることです。
さらに以下のロボットのようにバク転も実現させたいです。
Extreme Off-Road | #DEEPRobotics #Lynx All-Terrian #Robot#robotdog #tech #ai #quadrupedrobot #robotics pic.twitter.com/hxoTrvu86c
— DEEP Robotics (@DeepRobotics_CN) November 13, 2024
やっぱバク転カッコいいよ。
バク転は厳しいかもしれませんが前機種でもよくよく見ると1回転できていたりするので挑戦してみる価値はありそうです。
手持ちのホイレグでもバク転できそうだな pic.twitter.com/eYVpLDuFZx
— HomeMadeGarbage (@H0meMadeGarbage) November 26, 2024
M5Stack Roller
Roller485 Lite は3つしか購入していないため、4輪実現のためにRollerCANを使用することにしました。
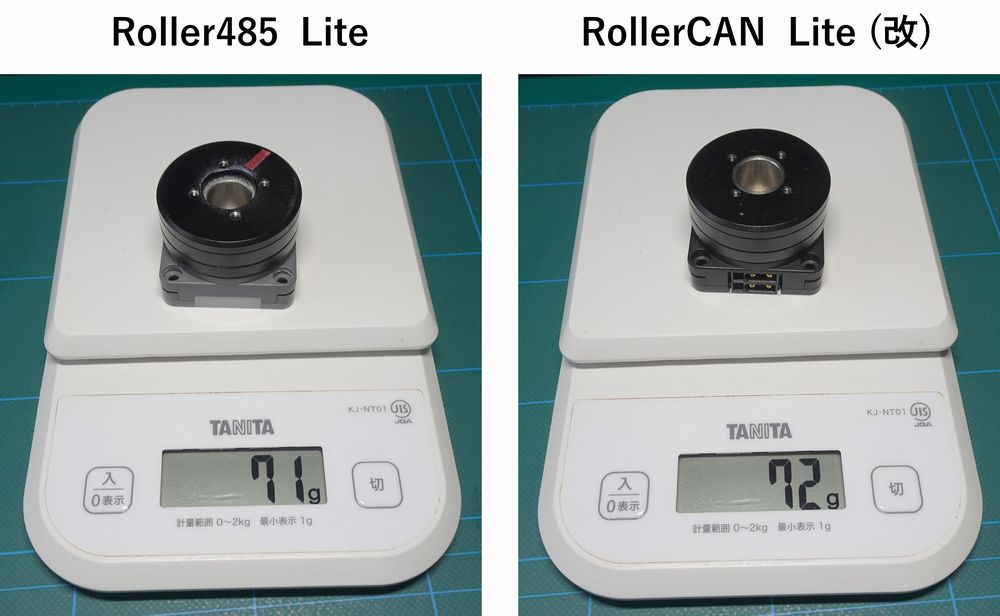
RollerCANのスリップリング部を外して RollerCAN Lite にしました。
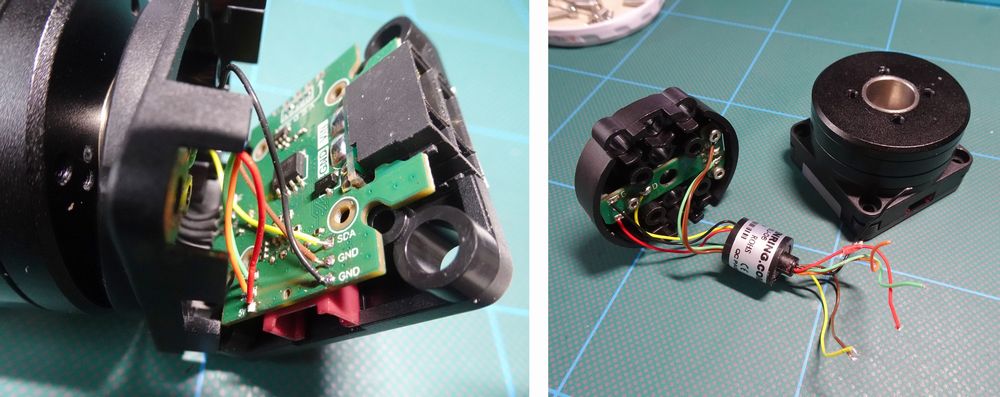
I2Cによる制御プロトコルはRoller485もRollerCANも同じで、重量もほぼ変わりませんでした。
手持ちのRoller485 Lite3つに加えて改造 RollerCAN Liteを使用して4輪を実現しました。
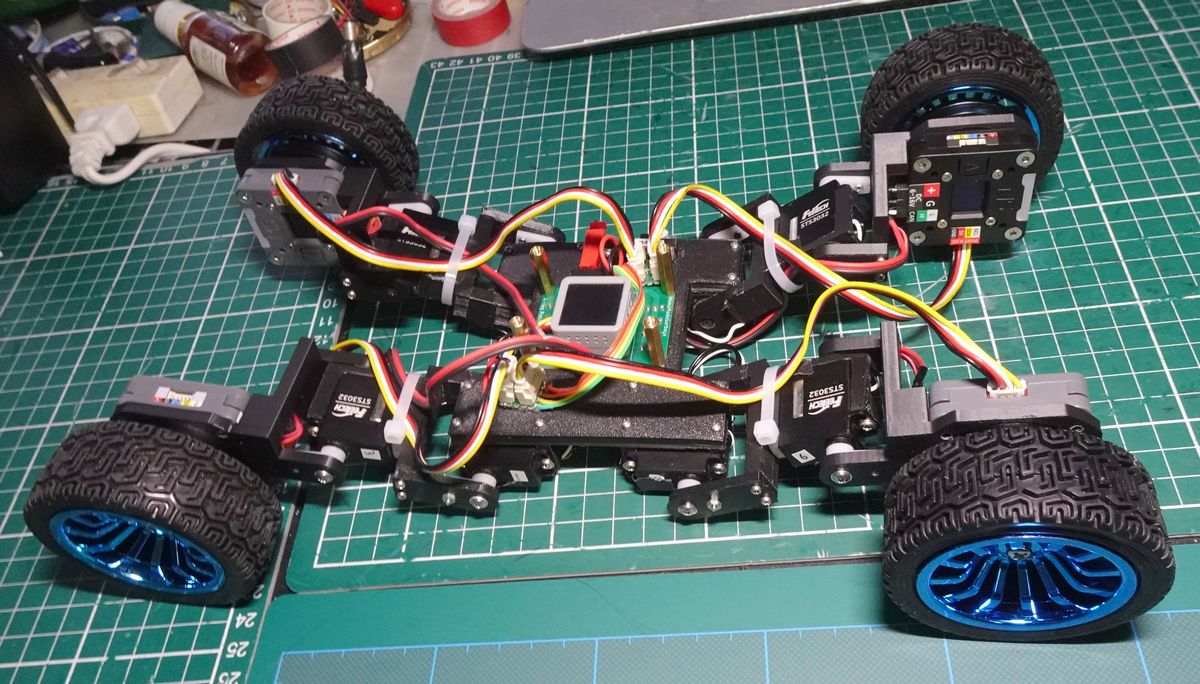
ちなみに関節に8個のサーボモータSTS3032を使用しています。

基本動作
4輪4脚による基本動作を確認します。
歩行動作
Wheeled Quadruped Robot
歩行時はタイヤブレーキかけたほうがいいな pic.twitter.com/6waIEUbOyl— HomeMadeGarbage (@H0meMadeGarbage) December 1, 2024
Rollerによるホイール動作も確認でき、宴会芸 “動く歩道逆走する人” も実現できました。
動く歩道逆走する人 pic.twitter.com/5V0MFk1stR
— HomeMadeGarbage (@H0meMadeGarbage) December 1, 2024
おわりに
ここでは素晴らしい Wheeled Quadruped Robot の実現に向けて、M5Stack社のブラシレスモータユニットRollerで4厘ロボットを製作しました。
基本的なホイール駆動と歩行動作は確認できましたので最終目標のバク転実現に向けて作業を進めていきます。
引き続き何卒宜しくお願い致します。