Wheeled Quadruped Robot を作りたい3
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2024 |7日目
前回はモーションシーケンス生成アプリを作成して Wheeled Quadruped Robot の反転動作の確認をしました。
M5Stack社のブラシレスモータモジュール Rollerによるホイールだと重たく4輪での反転動作が実現できませんでした。
ここではホイール重量も加味して憧れのバク転動作検証を実施します。

目次
バク転動作
前回に引き続き 2輪の状態でバク転に挑みましたが、全然ダメでした。
1mmも後輪を上げられないの
タイヤ重いなぁ pic.twitter.com/xBMjX0i3aX
— HomeMadeGarbage (@H0meMadeGarbage) December 4, 2024
一旦ホイール全外し
一旦。Wheeled Quadruped Robot を作りたいとか言っといてアレだけど。。一旦ね。
前回製作したモーションシーケンス生成アプリで4脚ロボットによるバク転動作を確認します。
アプリで微調整しながら動作をブラッシュアップしました。
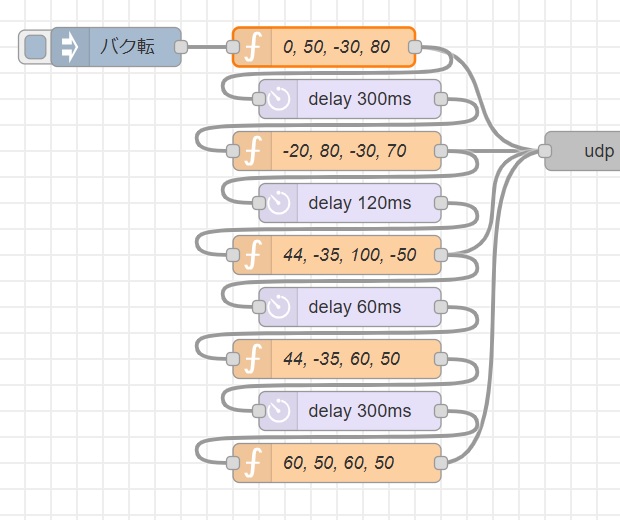
見てくださいこの美しきバク転動作を
モーションシーケンス生成アプリで足座標をUDPで送信して動作させているのですが、改めてバク転動作を実現できてしまうほどのリアルタイム性に驚きました。
UDP通信を活用したロボット制御は私の今後の人生をさらに豊かにしてくれそうです。
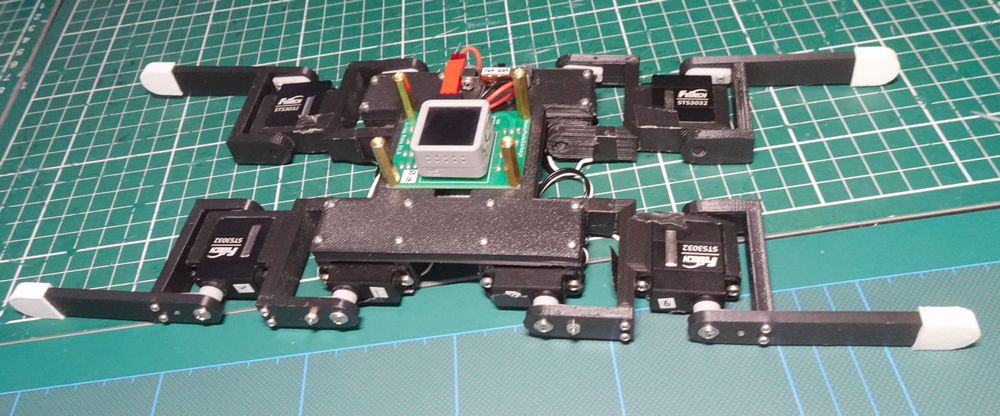
Wheeled Quadruped Robot
ただの4脚ロボットによるバク転動作を磨いてもしょうがないので、原点に戻ってシリアルサーボXL330によるホイールの Wheeled Quadruped Robot でバク転動作の検証をします。
原点回帰!
結局ホイールをXL330-M077-Tに戻した。。 pic.twitter.com/J0dZNMH74I
— HomeMadeGarbage (@H0meMadeGarbage) December 4, 2024
バク転動作
流石に簡単にはいかない。。けど浮いてはいる!
— HomeMadeGarbage (@H0meMadeGarbage) December 5, 2024
マイコン保護用に立ててるスペーサが折れるほどに何度も調整を繰り返しました。

簡単じゃないね。難しいわ。。もう少し関節サーボにトルクがあればって感じ
Wheeled Quadruped Robot pic.twitter.com/60SAn9oh4T
— HomeMadeGarbage (@H0meMadeGarbage) December 5, 2024
着地時の前足をもっと畳んで転がる感じにしてみた。
コレはバク転といって良いでしょうか??
うーんもうすこし頑張れそうだよなぁ 🙄
引き続き動作の検証を進めて素晴らしいバク転動作を実現させたいです。
こういう時にシミュレータがあればいいのかなぁ??この場合なら2D解析でイケそうだけどね。
おわりに
ここではバク転動作実現に向けてホイールの検討を実施して、当初のXL330によるホイールに戻しました。
精神を研ぎ澄ませてモーションを磨き Wheeled Quadruped Robot による完璧なるバク転を実現させたいです。
なんでこんなにバク転させたいのか分からなくなりかけてますが、覚めないうちに頑張ります。