Wheeled Quadruped Robot を作りたい6
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2024 |15日目
前回は Wheeled Quadruped Robot によるバク転動作の検証を実施し、見事に達成いたしました。
機体軽量化のために2輪駆動にするという違法すれすれのドーピングはかましましたが。。。
ここでは起上り倒立について検証をいたしましたので報告します。

目次
起上り倒立
以前の倒立は以下のように前傾姿勢でちょっと起上り感に欠けるものでした。
私の作った倒立振子はこういうことができます pic.twitter.com/AyrRiC5YXa
— HomeMadeGarbage (@H0meMadeGarbage) April 1, 2024
モーションシーケンス生成アプリ
本プロジェクトで活用しているNode-RED モーションシーケンス生成アプリで起上り動作を検証します。
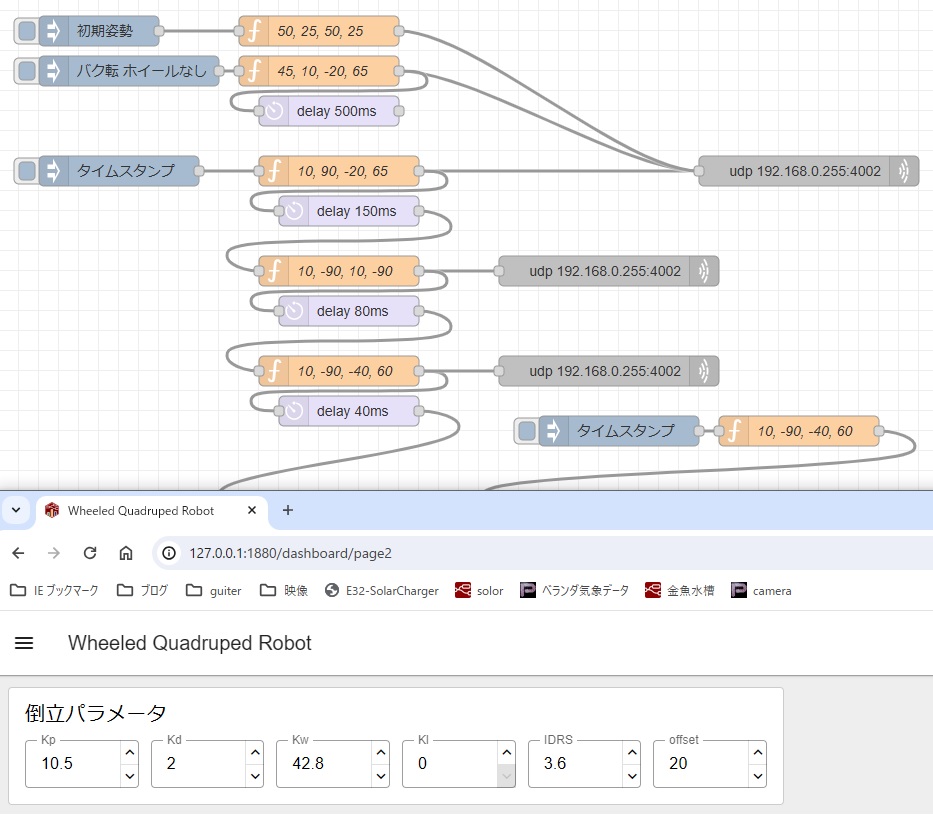
UDPで足座標送信に加えて、Node-RED Dashboard 2.0によるUIでの倒立パラメータの調整も行います。
動作検証
とりあえずモーションシーケンス生成アプリで以前の倒立動作を確認しました。
従来の起上りシーケンス
もっと起上ってる感を演出したい pic.twitter.com/tvgCE0keoo— HomeMadeGarbage (@H0meMadeGarbage) December 13, 2024
問題なく倒立動作を確認。
アプリに問題ないようですので直立動作を目指します。
なかなか難しい。。。
いや人生かよ pic.twitter.com/89ThVOYi3z
— HomeMadeGarbage (@H0meMadeGarbage) December 14, 2024
起上りの際の前足の納め方をゆっくりにするなど細かい動作をアプリで調整しながら確認し、理想の起き上がり動作を実現することができました。
Wheeled Quadruped Robot
立った立った水の上 pic.twitter.com/DhRZGCnGdc— HomeMadeGarbage (@H0meMadeGarbage) December 14, 2024
前傾姿勢ではなくボディが垂直気味に倒立できています。
おわりに
ここでは Wheeled Quadruped Robot の起上り倒立動作の検証を行いました。
関節サーボ STS3032、ホイールサーボ XL330-M077-T によるWheeled Quadruped Robotで起上り直立倒立ができたことは大変うれしいです。
さて紆余曲折だらけでしたが Wheeled Quadruped Robot によるバク転と起上り直立動作を実現することができました。
共にモーションシーケンス生成アプリでPCからUDP通信で動作指定していますので、動作を全てマイコンに焼いて独立で動けるロボットに仕上げたいです。
次回いよいよ最終回!
またお会いいたしましょう。