ブラシレスモータで2足歩行ロボット1 ー 足製作 ー
本記事にはアフィリエイト広告が含まれます。
前回はブラシレスモータと歯車の組み合わせによって非常に具合の良いサーボ動作が確認できました。
ブラシレスモータサーボによって高速屈伸が実現。
倒立振子 ジャンプ pic.twitter.com/w9yRI3lR0x
— HomeMadeGarbage (@H0meMadeGarbage) January 28, 2025
これに気を良くした私はブラシレスモータによるサーボで2足歩行ロボットを制作しようと思い立ったのです。

目次
MKS ESP32 FOC V2.0
ブラシレスモータのコントローラとして MKS ESP32 FOC V2.0 を購入してみた

V1.0には馴染みがあったのですがV2.0は最近発売されたようで変更点がいくつかありました。
MKS ESP32 FOC V2.0入手
外部インターフェースのコネクタがなじみのうすい型で
困るKH-A1252RS-4Phttps://t.co/omvOe0YJlP pic.twitter.com/jenxfuT4pk
— HomeMadeGarbage (@H0meMadeGarbage) January 9, 2025
USBがCコネクタとなり、電流センサに変更がありました。
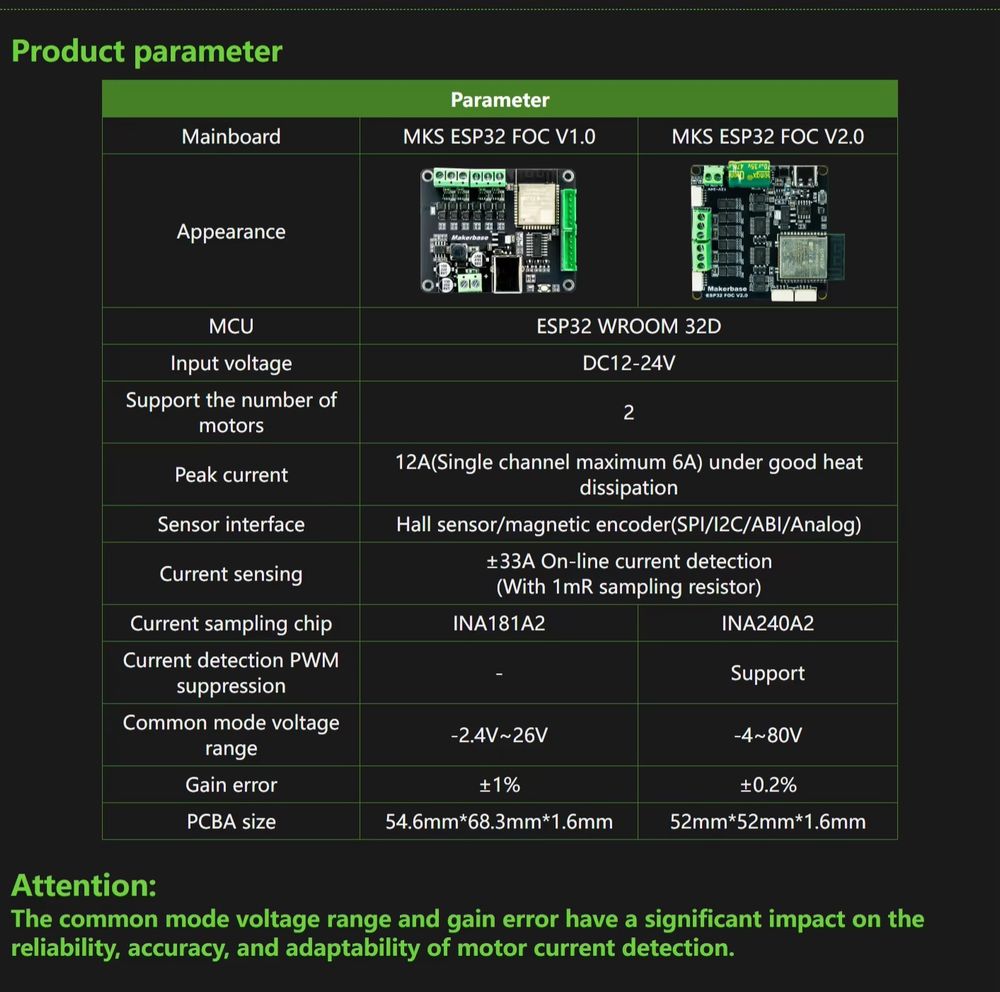
USBシリアル変換ICとしてCH340Kが採用されWinPCの場合はドライバのインストールが必要です。
以下を参考にドライバインストール
V1.0はモータ電源を供給しないとUSBシリアル書き込みができませんでしたが、
V2.0はUSB給電で書き込みができるようになったので不便さは改善されています。
GitHub
https://github.com/makerbase-motor/MKS-ESP32FOC
動作
MKS ESP32 FOC V2.0 に2個のブラシレスモータをつないでFOC動作を楽しみました。
PSコントローラのジョイスティックでモータの角度をコントロールしています。
また何かを pic.twitter.com/1TTrx87Jt7
— HomeMadeGarbage (@H0meMadeGarbage) January 29, 2025
ブラシレスモータ 5010 360KV

磁気エンコーダ
[amazonjs asin=”B0CWPPFYHX” locale=”JP” title=”12ピース AS5600 磁気エンコーダ 磁気誘導角度測定センサーモジュール 12ビット 高精度”]
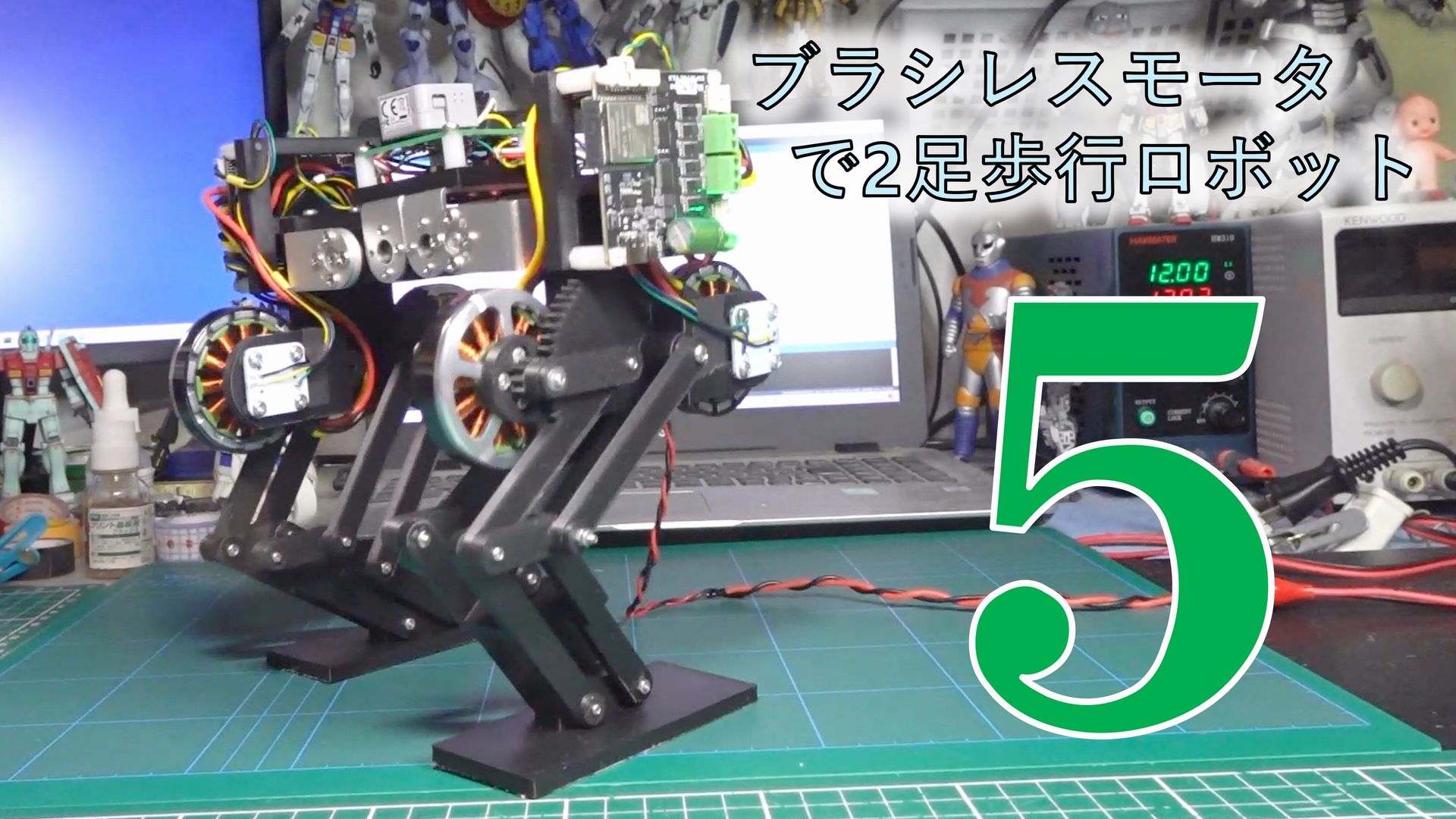
足作製
差動駆動型リンク機構による足を構築しました。
ええ感じ
ロボットDJせぎょ太郎 pic.twitter.com/HTKQk77mRt
— HomeMadeGarbage (@H0meMadeGarbage) January 30, 2025
逆運動学
PSコントローラのジョイスティックで足先の座標を指定する逆運動学による制御も確認。
高速応答が実に心地よいです。
逆運動学 pic.twitter.com/rVjlMGxtY3
— HomeMadeGarbage (@H0meMadeGarbage) January 30, 2025
差動駆動型リンク機構による逆運動学は以前履修済み
おわりに
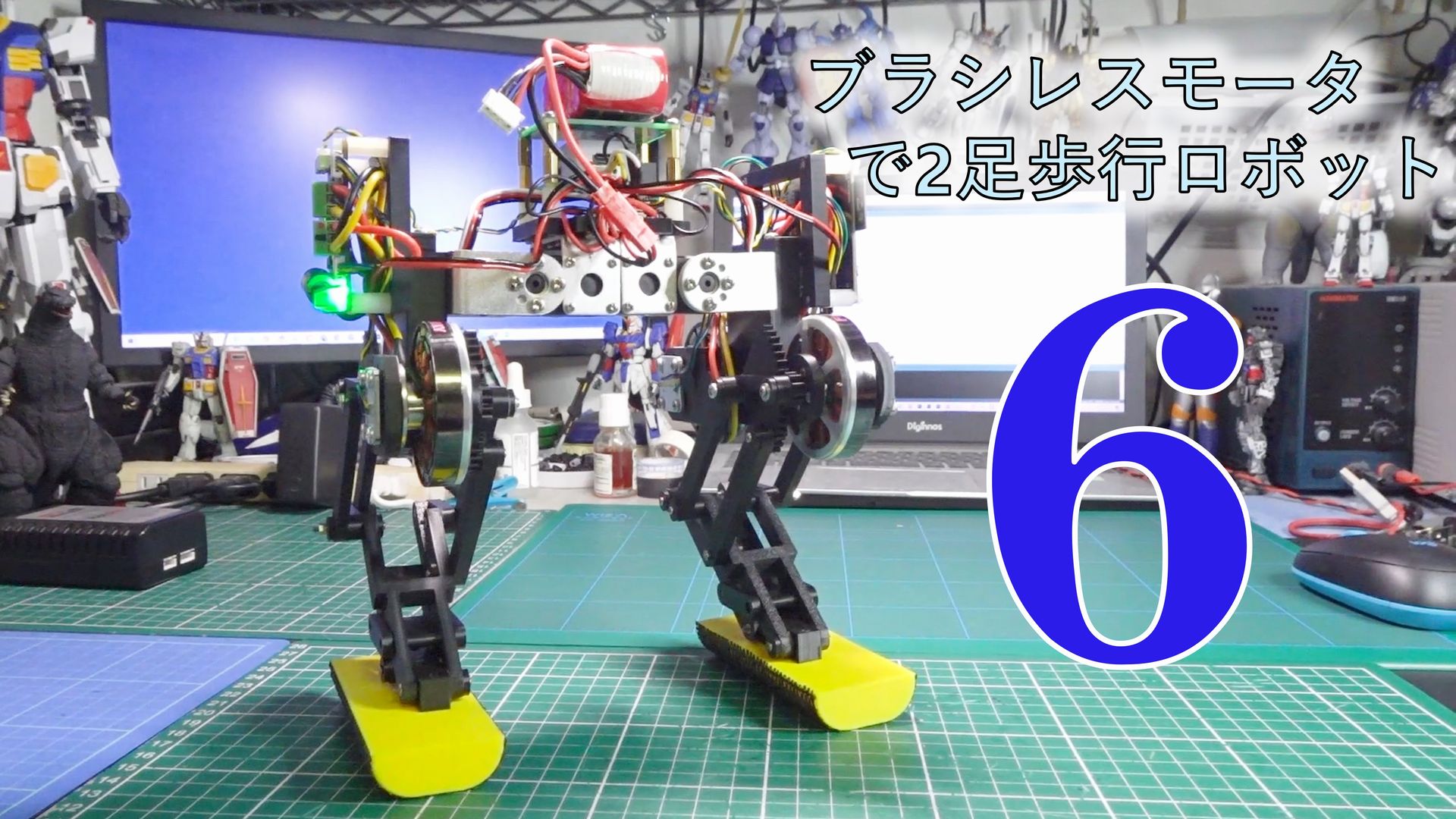
なかなか良い足ができたので是非もう一本製作して次回は2足歩行の検証を実施したいです。
あー両足で味わいたいわ pic.twitter.com/Qnftit6FFQ
— HomeMadeGarbage (@H0meMadeGarbage) January 30, 2025
コントローラ追加注文中なのですが、春節中でなかなか発送されませんね。。。