二足歩行ロボット SHISEIGYO-1 Walker 参 改
本記事にはアフィリエイト広告が含まれます。
以前 製作した SHISEIGYO-1 Walker Jr. の足のブレードの距離を開けてみたところ。。。
SHISEIGYO-1 Walker Jr.
足を1枚のブレード状につけてないといけないと思っていたけど
離してもいけるなぁ
IDRS (倒立角動的再調整システム) が効いてると思う。
どれだけ離せるべか可能性ひろがる pic.twitter.com/wygR46vQdQ
— HomeMadeGarbage (@H0meMadeGarbage) February 12, 2023
特に問題なく歩行できることが分かりました。
左右の足の接地線の距離が離れると歩行のたびに大きく重心位置が変わりますが、
リアクションホイールに仕込んでいるIDRS (倒立角動的再調整システム) がうまく効いてバランスを保持しているようです。
IDRS (倒立角動的再調整システム)については以下参照ください。
倒立角動的再調整システム
Inverted angle Dynamic Readjustment System (IDRS)
の効能を示す動画を製作いたしました。実に良いシステム(*’ω’*)#リアクションホイールへの道 pic.twitter.com/tIv2cx5zKj
— HomeMadeGarbage (@H0meMadeGarbage) December 1, 2020
この結果を受けて、リアクションホイールでバランスをとる二足歩行ロボットを再検証しましたので報告します。
目次
SHISEIGYO-1 Walker 参 で検討
SHISEIGYO-1 Walker 参 を用いて足の構成の再検討を実施します。
足先を1直線状に動かしてモデル歩きのような動作をするロボットです。
足は高トルクのシリアルサーボLX-244で構成しています。
足構成検討
とりあえず、ロール用の最上部サーボを取り除いて固定してみました。
現実のロボティクス pic.twitter.com/pgkIyiHKST
— HomeMadeGarbage (@H0meMadeGarbage) February 13, 2023
この足先の形状では、明らかにうまくいきそうもありません。
足先製作
足先をL字状のブレードにしてみました。
片方クックできた。
少し可能性感じる。 pic.twitter.com/IQc5ypvurS— HomeMadeGarbage (@H0meMadeGarbage) February 13, 2023
片足のみですが、倒立も問題ないようです。
この形状であれば、左右の足の距離も大きく開くこともありません。
両足製作し足踏み動作を確認しました。
なんかドムみたいだ pic.twitter.com/MY7DZcdQvM
— HomeMadeGarbage (@H0meMadeGarbage) February 15, 2023
足踏みによって接地する足が変わっても、IDRS機能によってバランスが保たれています。
またSHISEIGYO-1 Walker 参 ではESP32のデュアルコアを用いて1台でフライホイールと足のサーボモータを制御していましたが、ここでは処理精度向上のためにESP32を2台使用してホイールとサーボをそれぞれ制御しています。
歩行
歩行動作を確認しました。
ゆっくりで姿勢は低い状態ですが無事に歩行動作を実現できました!!
モデル歩きなんて難しい方法ではなく最初からこうすれば良かった。。。ww
歩行メソッドは SHISEIGYO-2 WalkerやSHISEIGYO-1 Walker Jr.に適応したものと同様で正弦波で振動を抑えて制御しております。
システム構成
フライホイールとサーボモータの制御のためにESP32を2個使用しておりましたが、冗長でもったいないためシステムを再構成しました。
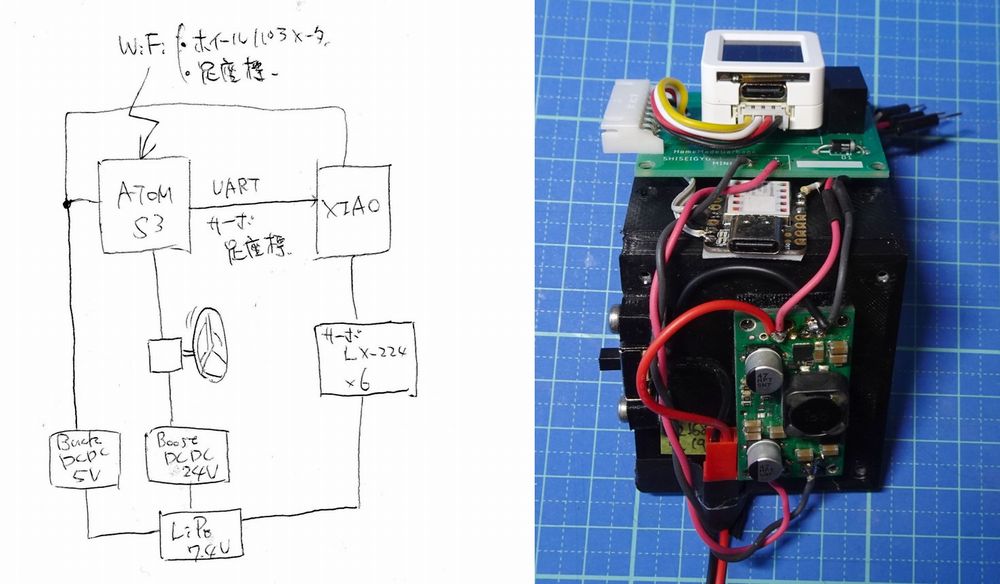
ATOMS3でフライホイールを制御し、Seeed XIAOで足のサーボモータ(6個)を制御するようにしました。
ATOMS3をAPモードにしてWiFiでブラウザからホイールの制御パラメータや足の座標や動作モードを指示します。
ATOMS3とXIAOはUARTで通信します。
電源には2セルのLiPoバッテリを使用します。
動作
更新したシステム構成で歩行動作確認
二足歩行ロボット
SHISEIGYO-1 Walker 参 改
爆誕#robot #robotics pic.twitter.com/Co4PDtpKqL— HomeMadeGarbage (@H0meMadeGarbage) February 16, 2023
無事に動作しました。
このロボットを”SHISEIGYO-1 Walker 参 改”と命名!
足の高さを上げて、更に歩行速度も上げてみました。
いい感じ!姿勢がよくなり人間に近づきましたね。
更に足をのばしてみました。
二足歩行ロボット pic.twitter.com/A7hrD1LGcc
— HomeMadeGarbage (@H0meMadeGarbage) February 16, 2023
こちらはまだ調整が必要そうです。。
おわりに
ここではSHISEIGYO-1 Walker 参 の足の構成を再検討し、2足歩行動作を実施しました。
現状では片足3個づつのサーボモータをしようしていますが、平行リンク機構を適応すれば片足サーボ2個で足を構築できます。
ロール用のサーボモータを追加すれば更に豊かな動作が実現できるかもしれません。
こいつは忙しくなりそうだゼ
家でロボットに歩かれるとジャマだ pic.twitter.com/2KTwAggQLD
— HomeMadeGarbage (@H0meMadeGarbage) February 16, 2023