CAN通信
シリアルリンク 2足歩行ロボットの製作12 ー 完成 the FINAL ー
前回は かかとYaw軸や体幹Roll軸といった新しい機構の検証を実施しました。 https://homemadegarbage.com/seriallink11/ 改良は概ね良い結果が得られ大変に喜びました。 今回は最終仕上げとしまして、以前ヒザのブラシレスモータを BE410...
電子工作 2025.8.22 お父ちゃん ![]()

シリアルリンク 2足歩行ロボットの製作11 ー もろもろ改造 ー
前回はシリアルリンク 2足歩行ロボットのヒザモータをブラシレスモータ BE4108 380KVに変更して動作を確認しました。 https://homemadegarbage.com/seriallink10/ 今回はかなり踏み込んだ改造をもろもろ実施したので報告いたします。 &...
電子工作 2025.8.17 お父ちゃん ![]()

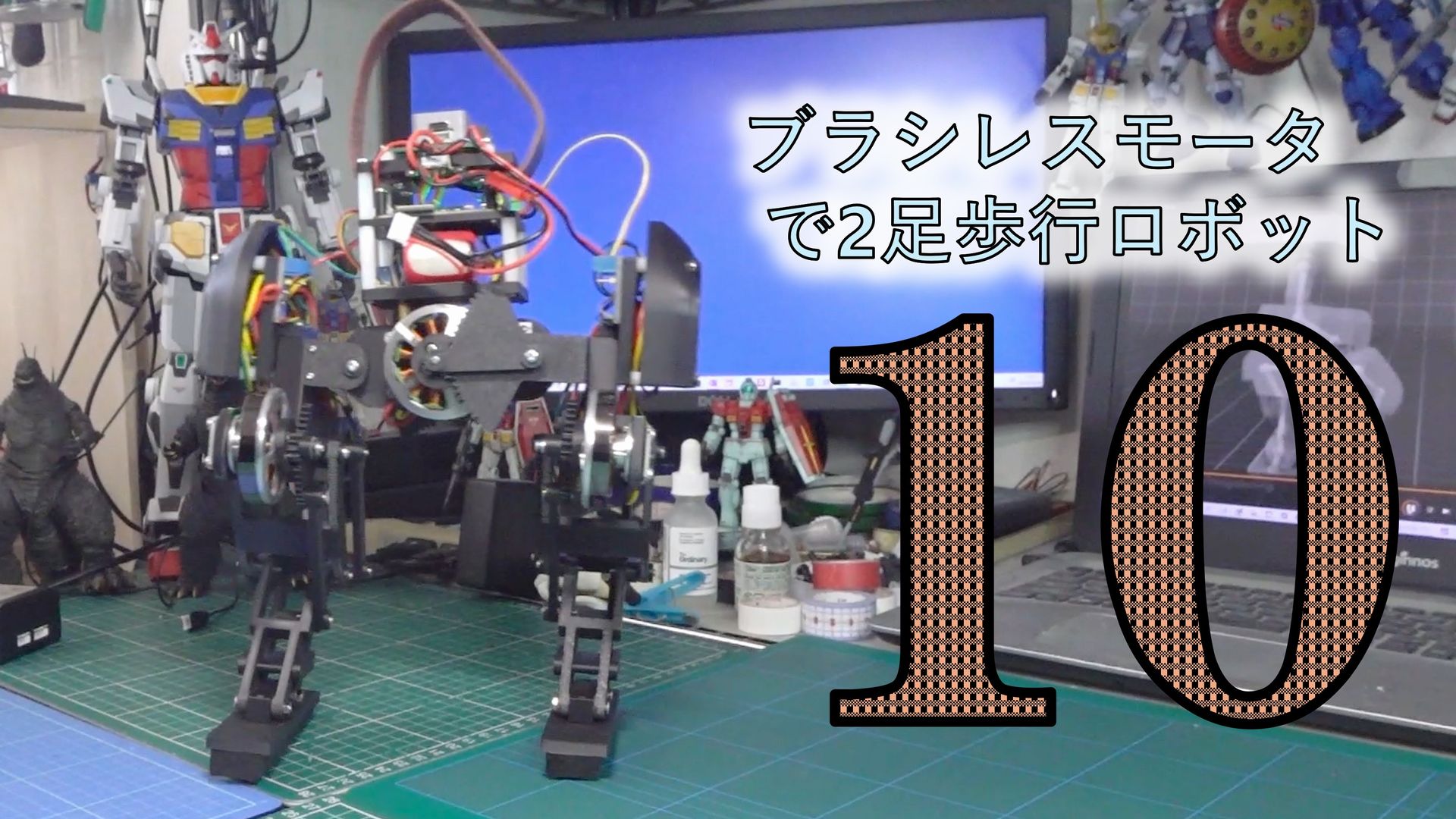
シリアルリンク 2足歩行ロボットの製作10 ー モータ変更 ー
前回は股関節ユニットのRoll軸をYaw軸に改造して、旋回動作を楽しみました。 https://homemadegarbage.com/seriallink09 シリアルリンクだとヒザモータの負担が大きく。もっとトルクやスピードを大きくしたいなと常々思っておりました。 &nbs...
電子工作 2025.8.9 お父ちゃん ![]()

シリアルリンク 2足歩行ロボットの製作9 ー Yaw軸検討 ー
前回はセンシングによる半自動歩行動作の検証を楽しみました。 https://homemadegarbage.com/seriallink08/ モータギアをチタン製にしたので壊れる心配もなく思う存分検証を進めることができました。 チタニウムを3Dプリントってどういうことなん...
電子工作 2025.8.5 お父ちゃん ![]()
シリアルリンク 2足歩行ロボットの製作8 ー モーション検討 ー
前回は JLC3DP サービスでチタン製歯車を製作し、ロボに導入して味見してみました。 https://homemadegarbage.com/seriallink07/ 歯車の具合は非常によく、欠けるなどの心配もなくなりました。 思う存分動作検証できるようになったのでご報告さ...
電子工作 2025.8.3 お父ちゃん ![]()

シリアルリンク 2足歩行ロボットの製作7 ー メタル歯車検討 ー
前回は 0.2mmノズル でPLAとPETGフィラメントの歯車を3Dプリントして検討いたしました。 https://homemadegarbage.com/seriallink06// ロボットのヒザモータに0.2mmノズル製歯車を導入し、ロボット動作の検討と並行して強度評価を実...
電子工作 2025.7.22 お父ちゃん ![]()

シリアルリンク 2足歩行ロボットの製作6 ー 歯車検討 ー
前回はブラシレスモータを用いた4自由度 シリアルリンク機構の2足歩行ロボットの歩行動作の再検証し、正弦波による周期動作を確認しました。 https://homemadegarbage.com/seriallink05/ 歯車が壊れる このロボットの検証をする際にモータの歯車...
電子工作 2025.7.16 お父ちゃん ![]()

シリアルリンク 2足歩行ロボットの製作5 ー 歩行動作2 ー
前回はブラシレスモータを用いた4自由度 シリアルリンク機構の2足歩行ロボットの歩行動作の検証をしました。 https://homemadegarbage.com/seriallink04/ ここではさらに歩行について検証します。 ロボ起動 ロボの起動 pic.twitte...
電子工作 2025.6.26 お父ちゃん ![]()

シリアルリンク 2足歩行ロボットの製作4 ー 歩行動作 ー
これまでロボの強化学習について検討してきました。 学習に耐えうるモデルを制作し、中腰バランス動作を実機検証しました。 https://homemadegarbage.com/rl07/ 静止状態でのバランス動作実現までにかなり時間がかかり、ここから歩行実現となると一生かけてもで...
電子工作 2025.6.20 お父ちゃん ![]()
シリアルリンク 2足歩行ロボットの製作3 ー 足踏み動作 ー
前回はブラシレスモータを用いたシリアルリンク機構の足を有する2足歩行ロボットとして4自由度の2脚ロボを完成させました。 https://homemadegarbage.com/seriallink02 ここでは足踏み動作の検討を実施しましたので報告いたします。 ...
電子工作 2025.5.2 お父ちゃん ![]()
シリアルリンク 2足歩行ロボットの製作2 ー 機体完成 ー
この度 ブラシレスモータを用いた高自由度のシリアルリンク機構の足を有する2足歩行ロボットの完成を目指しプロジェクトをキックオフしました。 https://homemadegarbage.com/seriallink01/ まず4自由度の足で動作確認するべく、前回は片足を完成させま...
電子工作 2025.4.28 お父ちゃん ![]()
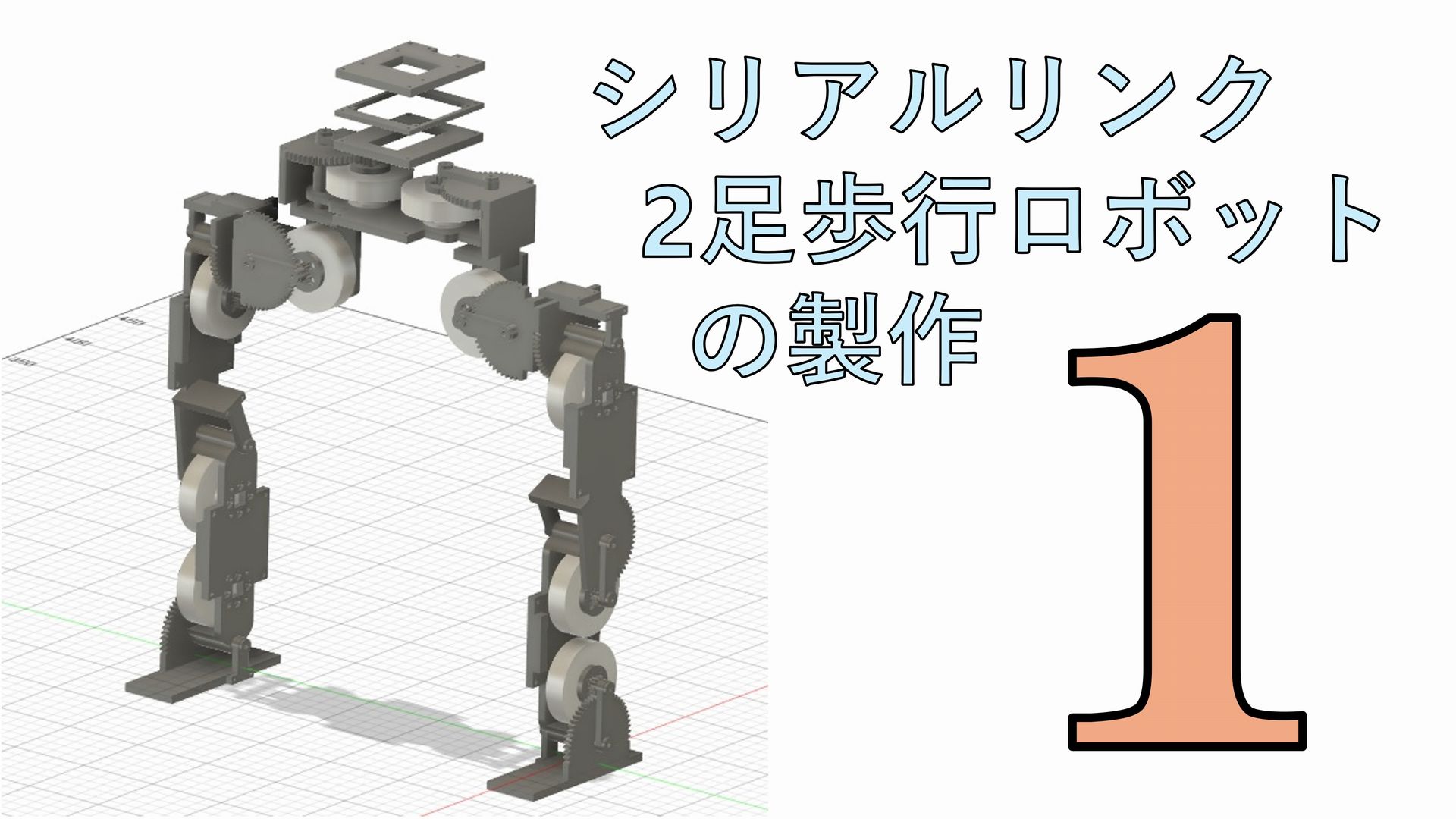
シリアルリンク 2足歩行ロボットの製作1 ー キックオフ ー
先日はブラシレスモータ活用の習作として2足歩行ロボットを製作しました。 https://homemadegarbage.com/robottrip14 ブラシレスモータの応答性の良さと電流によるトルクセンシングによって物理に応答した生き生きとした動作が実現でき大変満足致しました。...
電子工作 2025.4.23 お父ちゃん ![]()

ブラシレスモータで2足歩行ロボット12 ー はじめての金属加工 ー
前回はブラシレスモータを用いた2足歩行ロボットの動作検討を実施して、現行の3自由度の足としては満足いく結果を得ることができました。 https://homemadegarbage.com/robottrip13// 家のドロイドや。かわええやろ ...
電子工作 2025.4.11 お父ちゃん ![]()

ブラシレスモータで2足歩行ロボット11 ー 動作検討3 ー
前回は足底に低反発スポンジを採用することでスムーズな足運動動作を実現することができました。 https://homemadegarbage.com/robottrip12/ 歩行もしっかり足を上げてスムーズにできるようになりました。 ...
電子工作 2025.4.7 お父ちゃん ![]()
ブラシレスモータで2足歩行ロボット10 ー 動作検討2 ー
前回はCAN通信を導入してモータトルクによるウェイトシフト検知での足踏み動作を確認しました。 https://homemadegarbage.com/robottrip11// 足踏み 念願のモータトルクからウェイトシフト検知して足切換自動化 やっとできたわ。 pic.t...
電子工作 2025.3.29 お父ちゃん ![]()