M5stack
姿勢制御モジュール 4重倒立挑戦2 ーリアクションホイールへの道48ー
HomeMadeGarbage Advent Calendar 2021 |15日目 前回 挑戦した姿勢制御モジュールの4段倒立。 このたび再挑戦しましたので報告します。 https://homemadegarbage.com/reactionwheel45 ...
Advent Calendar / 電子工作 2021.12.15 お父ちゃん ![]()

一脚 屈伸ロボ 爆誕
HomeMadeGarbage Advent Calendar 2021 |10日目 SHISEIGYO-2 Go 弐を応用して1脚ロボットを製作いたしましたので報告します。 https://homemadegarbage.com/shiseigyo-2go-2 サーボテスト ...
Advent Calendar / 電子工作 2021.12.10 お父ちゃん ![]()
タムラトウサクさん
HomeMadeGarbage Advent Calendar 2021 |9日目 エンジニアや研究者は使用技術や着想の引用元を明確にするべきである という教育を受けた 教育はされたが守るとは言っていない やりたいからやった むしゃくしゃしてやった ...
Advent Calendar / 電子工作 2021.12.9 お父ちゃん ![]()

特殊球体ホイール バランスロボット SHISEIGYO-2 Go 弐
HomeMadeGarbage Advent Calendar 2021 |7日目 以前製作した球体ホイールによるバランスロボットを改良いたしましたので報告いたします。 https://homemadegarbage.com/reactionwheel41 SHISEI...
Advent Calendar / 電子工作 2021.12.7 お父ちゃん ![]()
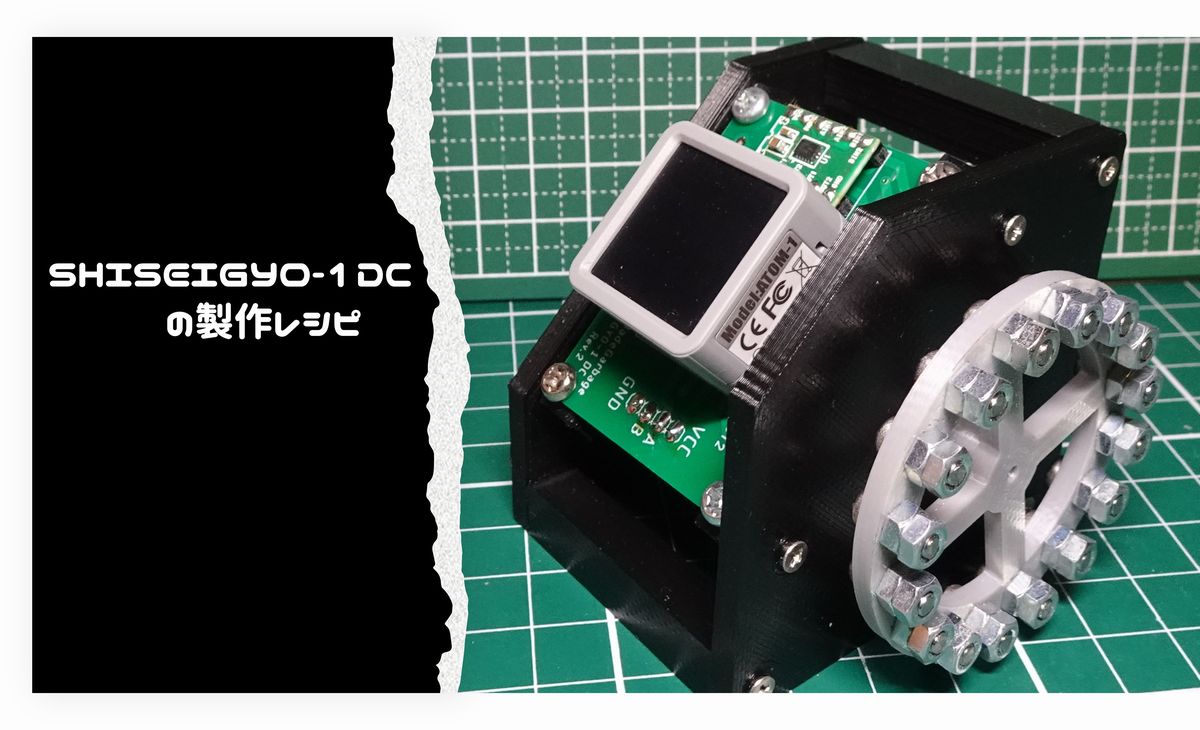
SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
HomeMadeGarbage Advent Calendar 2021 |1日目 手頃に姿勢制御装置を楽しみたいということで入手が容易な部品での製作を目指してミニ四駆モータを用いた SHISEIGYO-1 DC の開発を進めております。 前回はモータドライバの発熱によって長時間動作ができないこ...
Advent Calendar / 電子工作 2021.12.1 お父ちゃん ![]()
SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
DCモータを用いたSHISEIGYO-1 DC につきまして色々試しましたので報告いたします。 [amazonjs asin="B07YMVLNN1" locale="JP" title="タミヤ ミニ四駆 グレードアップパーツ No.487 トルクチューン2モーターPRO 15487"] &n...
電子工作 2021.11.6 お父ちゃん ![]()
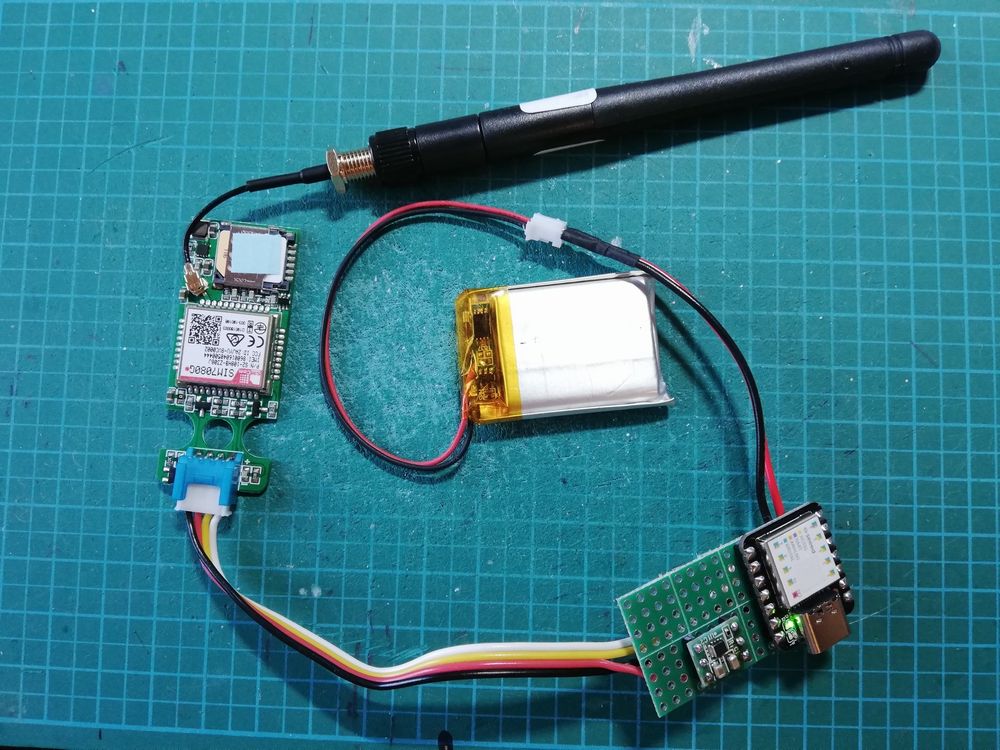
M5Stack UnitCatM 位置情報送信システムの省電力化
前回はUnitCatM で通信基地局位置情報を取得して長期運用を試してみました。 https://homemadegarbage.com/catm06/ 30分おきに位置情報をサーバに送る仕様で、400mAhのLiPoバッテリで121時間動作しました。 ここでは消費電力を低減して更に長期の動作...
IoT 2021.11.2 お父ちゃん ![]()

姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
前回は ミニ四駆用の小型モータを用いた姿勢制御モジュール (SHISEIGYO-1 DC) の実現を報告させていただきました。 https://homemadegarbage.com/reactionwheel44 以前、姿勢制御モジュールの3重倒立に挑戦いたしました。 ...
電子工作 2021.10.31 お父ちゃん ![]()
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
前回はついにDCモータを使用した1軸 姿勢制御モジュール SHISEIGYO-1 DC が実現され、喜びの報告をさせていただきました。 https://homemadegarbage.com/reactionwheel43 ここではSHISEIGYO-1 DC の更なる検証・改善...
電子工作 2021.10.23 お父ちゃん ![]()

DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
常々 姿勢制御モジュールを小型化したいと考えており、重たくサイズもそこそこのブラシレスモータの使用がネックとなっておりました。 ここでは姿勢制御モジュールを小型化をめざしてDCモータの使用を検討してみましたので報告いたします。 DCモータ 小型で入手性のよいDCモ...
電子工作 2021.10.16 お父ちゃん ![]()
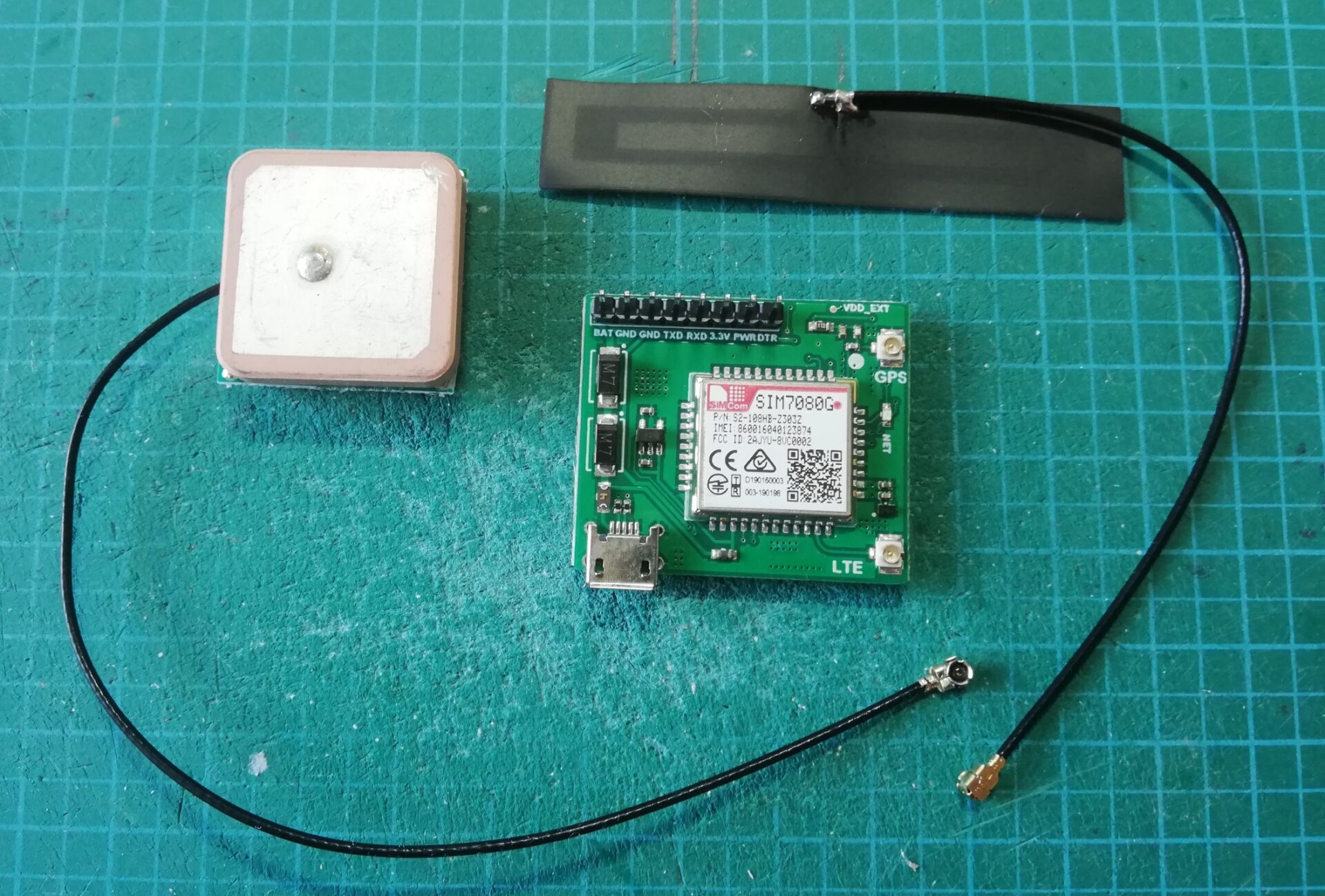
M5Stack UnitCatM 番外編 SIM7080G EVAボードを楽しむ
これまではM5Stack製の SIM7080G CAT-M/NB-IOT Unitをつこて色々検証してきました。 [bc url="https://shop.m5stack.com/products/sim7080g-cat-m-nb-iot-unit?variant=4049380216030...
IoT 2021.10.9 お父ちゃん ![]()

M5Stack UnitCatM で運用とエイジング
前回は通信基地局の位置情報取得について記載いたしました。 https://homemadegarbage.com/catm05#%E5%AE%9F%E9%A8%93%E7%B5%90%E6%9E%9C 目標 本件の目標は以下の通りです。 格安データSIM探...
IoT 2021.10.6 お父ちゃん ![]()

M5Stack UnitCatM で位置情報取得
前回はシステムの消費電力測定とデータSIMの契約について記載いたしました。 https://homemadegarbage.com/catm04#%E7%9B%AE%E6%A8%99 目標 本件の目標は以下の通りです。 格安データSIM探して契約:IIJmioに決定 ...
IoT 2021.9.28 お父ちゃん ![]()

M5Stack UnitCatM の 消費電力とデータSIM契約
前回はコントローラにSeeduino XIAOを選定し、通信動作を確立しました。 https://homemadegarbage.com/catm03#%E7%9B%AE%E6%A8%99 目標 本件の目標は以下の通りです。 格安データSIM探し...
IoT 2021.9.25 お父ちゃん ![]()
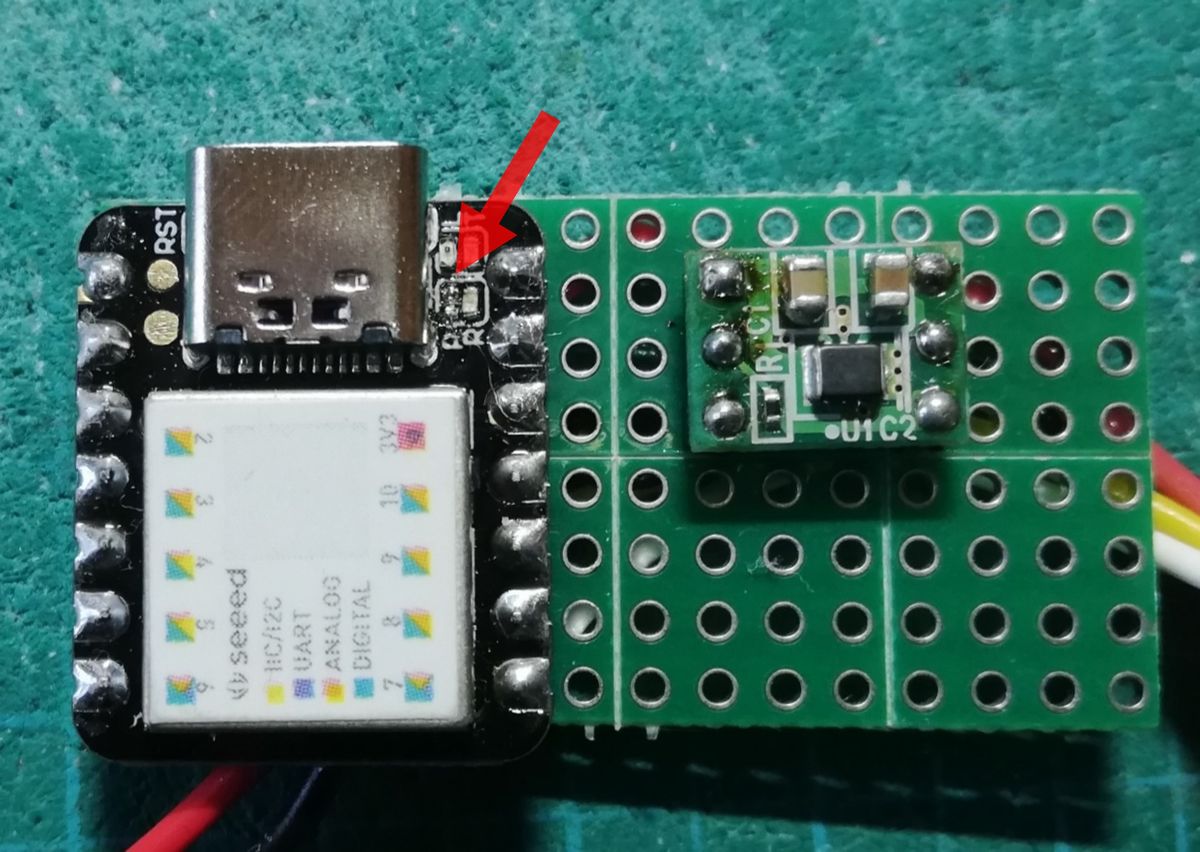
M5Stack UnitCatM を Seeeduino XIAO で制御
前回はUnitCatM によるHTTP通信を確認しました。 https://homemadegarbage.com/catm02 ここではUnitCatM を制御するマイコンの検討を行いました。 目標 本件の目標は以下の通りです。 格安データSIM探して...
IoT 2021.9.19 お父ちゃん ![]()