
Seeed XIAO
ついに達成!!! 8重倒立への道4
前回はSHISEIGYO-1の筐体を新造して、7重倒立の検討を実施しました。 https://homemadegarbage.com/reactionwheel78// ここでは安定的7重倒立を実現させて、ついに8重倒立に挑戦します。 8台のモジュール 今...
電子工作 2026.1.18 お父ちゃん ![]()




7重倒立に挑戦3 ついに実現!! ーリアクションホイールへの道75ー
現在挑戦中の7重倒立 https://homemadegarbage.com/reactionwheel74// 前回は6重倒立まで確認しました。 7重倒立 6/7クリア pic.twitter.com/62W9bQGo8p — HomeMadeGarbage...
電子工作 2025.1.28 お父ちゃん ![]()

3重点倒立 ーリアクションホイールへの道70ー
先日 SimpleFOCでのブラシレスモータ制御による3軸姿勢制御モジュールを製作しました。 https://homemadegarbage.com/simplefoc08/ これにより手元に3機の3軸姿勢制御モジュールがそろいましたのでちょっと余計なことをしてみました。 &n...
電子工作 2024.10.7 お父ちゃん ![]()

SHISEIGYO-3 DC Go がゆく ーリアクションホイールへの道69ー
ずーーっと3軸姿勢制御モジュールの活用方法を考えてきて答えを出せずにいたのですが、ドローン用の小型モータによる3軸モジュール SHISEIGYO-3 DC を完成させたのを機に実際に手を動かす勇気めいたものが湧いてきました。 https://homemadegarbage.com/reaction...
電子工作 2024.5.30 お父ちゃん ![]()
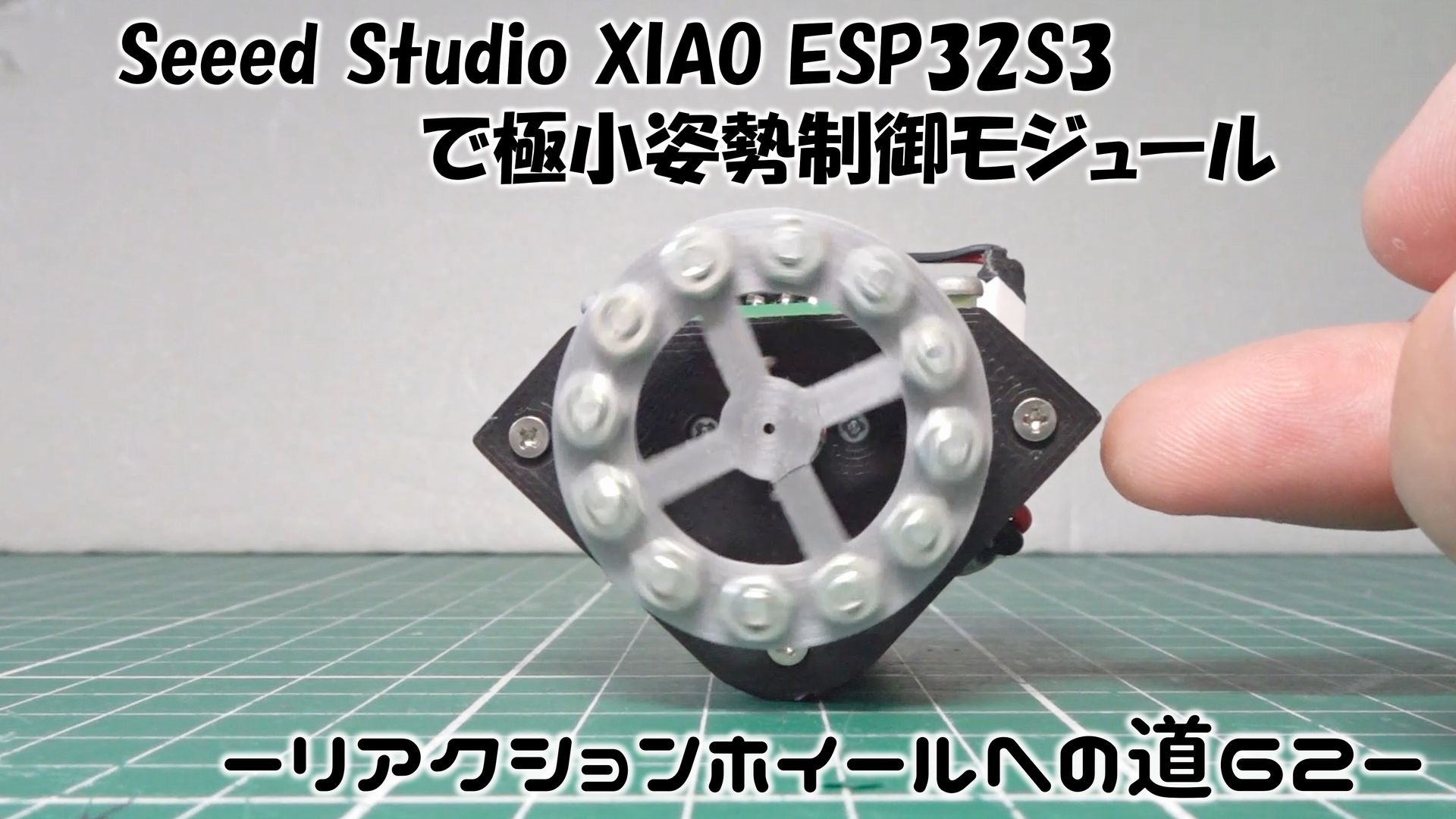
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
HomeMadeGarbage Advent Calendar 2023 |18日目 そろそろ多重倒立がしたくなってきました。たまに来るこの感情 現状の記録は5重。 https://twitter.com/H0meMadeGarbage/status/1640186881903042561 ...
Advent Calendar / 電子工作 2023.12.18 お父ちゃん ![]()
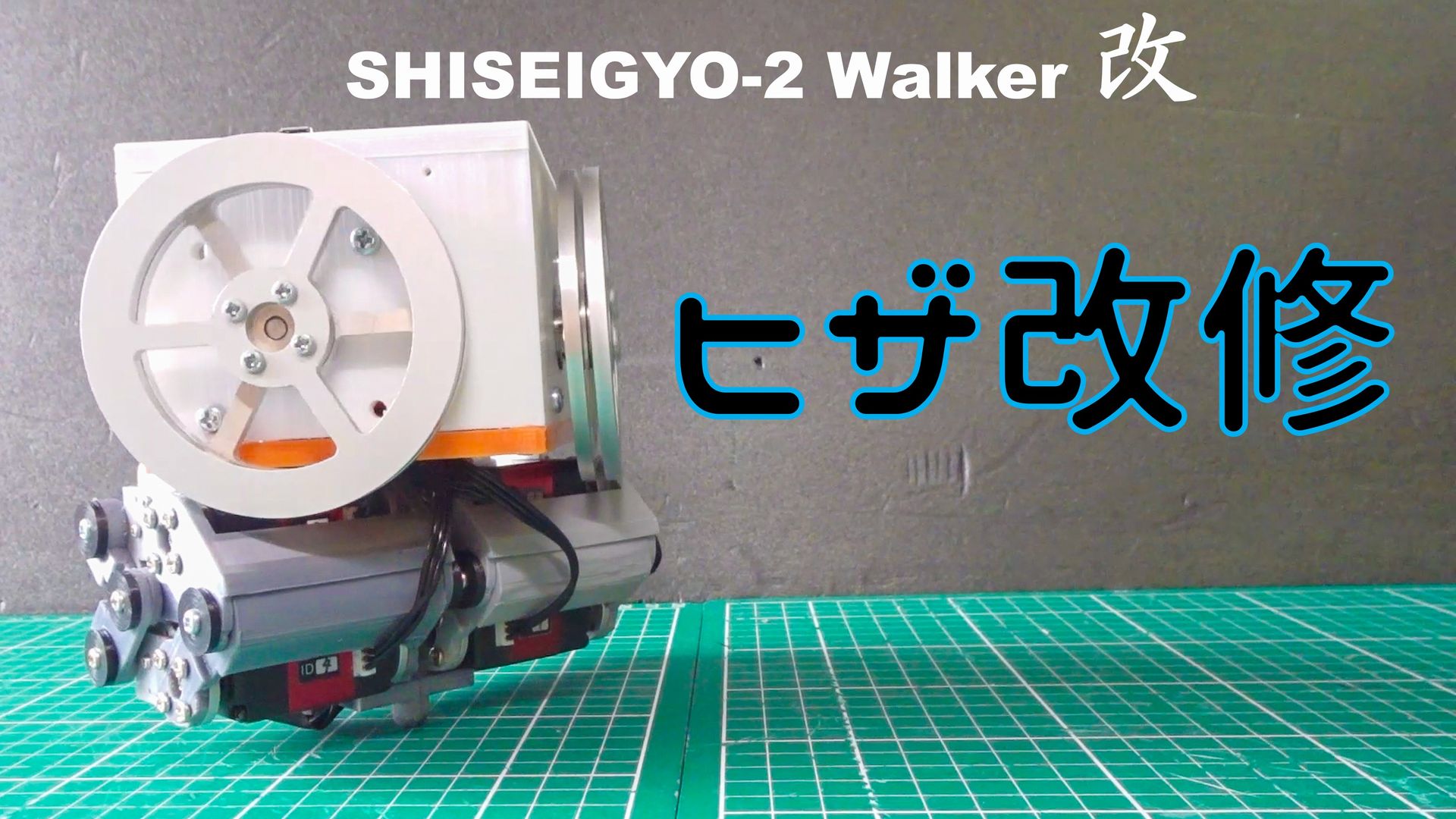
二足歩行ロボット SHISEIGYO-2 Walker 改 のヒザ改修
以前製作した二足歩行ロボット SHISEIGYO-2 Walker 改 ですが、 https://homemadegarbage.com/walker05// 関節がイジっているうちにグニャグニャになり うまく歩けなくなってしまいました。 https://twitter.com/H0me...
電子工作 2023.8.8 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-2 Walker 改 の検討2
前回は2軸のフライホイールによるバランスで倒立する2足歩行ロボット “SHISEIGYO-2 Walker 改” の実現に向けて足の製作を実施しました。 https://homemadegarbage.com/walker04/ ここでは製作した足を実装して歩行動作を確認します。 ...
電子工作 2023.3.23 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-2 Walker 改 の検討1
前回は足首にモータを追加して旋回動作を確認しました。 https://homemadegarbage.com/onewalkersan11/ 1軸のホイールによるバランスでは旋回動作が難しいという結論を得ましたので、 ここでは2軸の検討を実施しました。 2軸での...
電子工作 2023.3.20 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-1 Walker 参 改 5
前回はマイコンを削減してESP32単体で制御できるようにして、さらに24V DCDCモジュールの低価格化をはかりました。 https://homemadegarbage.com/onewalkersan10// ここでは足を改良して旋回動作できるようにしましたので報告します。 ...
電子工作 2023.3.13 お父ちゃん ![]()
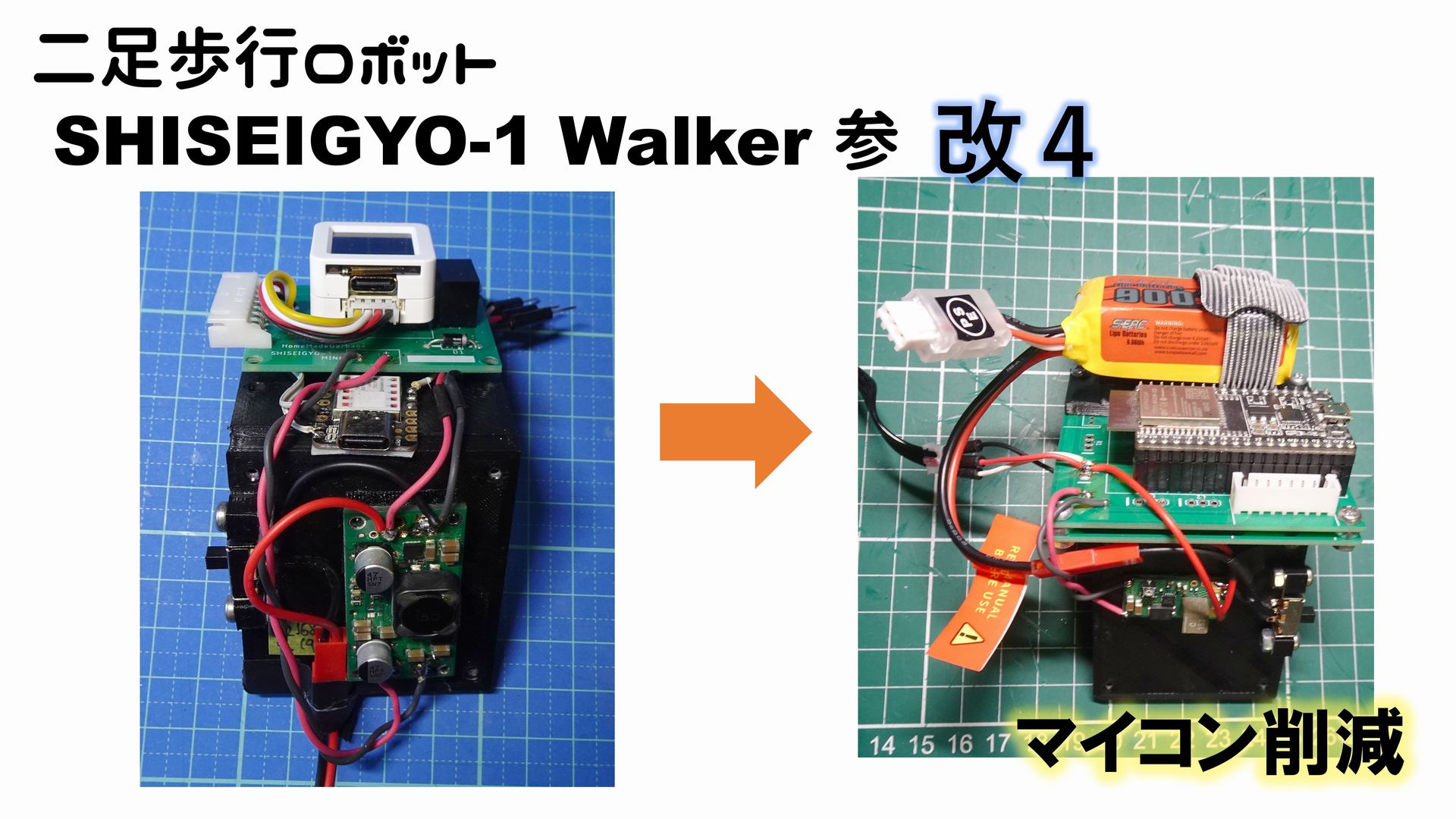
二足歩行ロボット SHISEIGYO-1 Walker 参 改 4
これまでSHISEIGYO-1 Walker 参 の改良版についてはマイコンを2台使用して制御していたが、今回削減をはかったので報告します。 https://homemadegarbage.com/onewalkersan09/ 従来システム構成 以下がこれまでの...
電子工作 2023.3.8 お父ちゃん ![]()
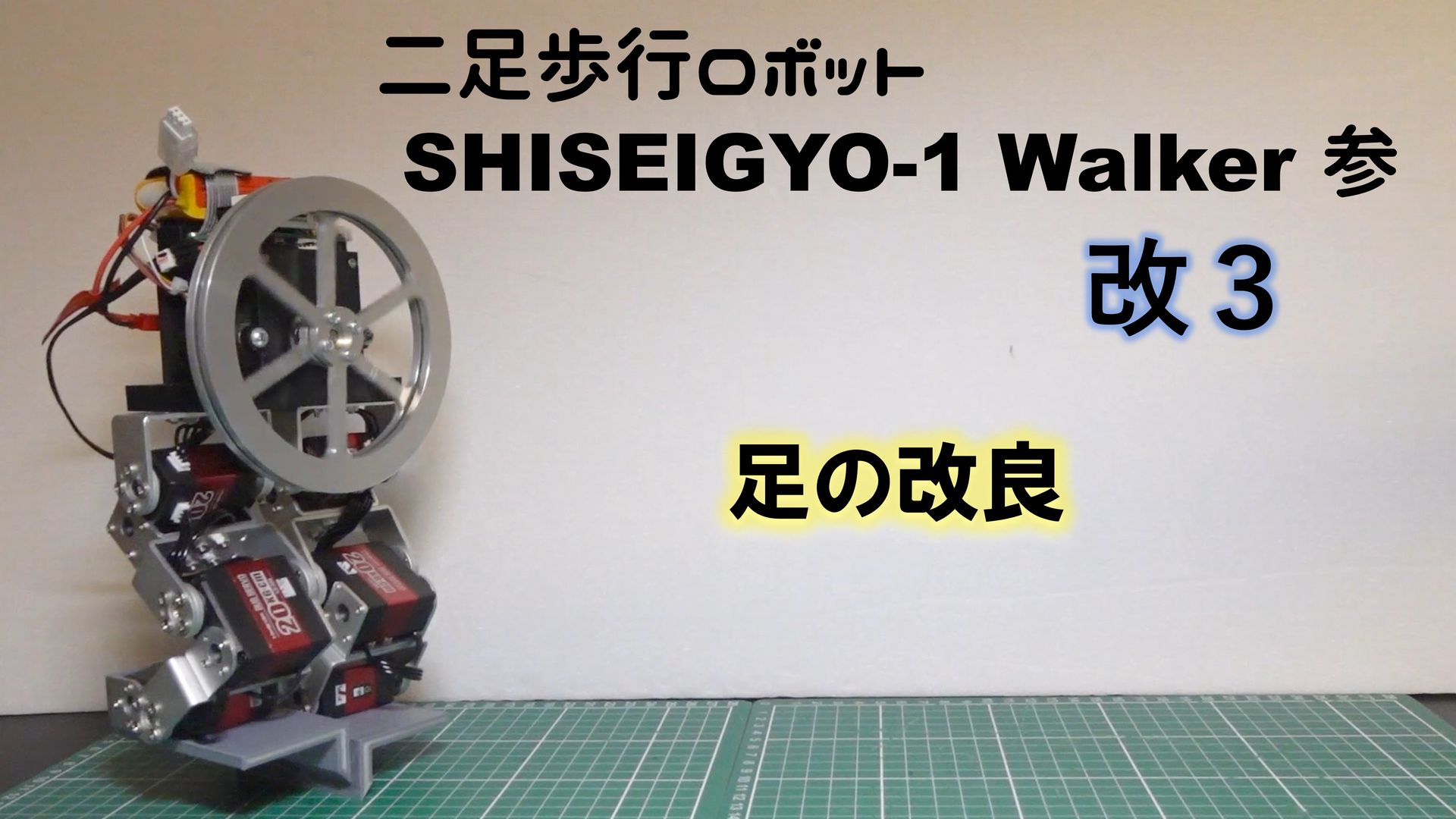
二足歩行ロボット SHISEIGYO-1 Walker 参 改 3
前回はSHISEIGYO-1 Walker 参 改 の足に平行リンク機構を導入しサーボ削減しての歩行動作を確認しました。 https://homemadegarbage.com/onewalkersan08// ここでは、通常の足に戻して再度歩行動作の検証を行いました。 ...
電子工作 2023.2.24 お父ちゃん ![]()
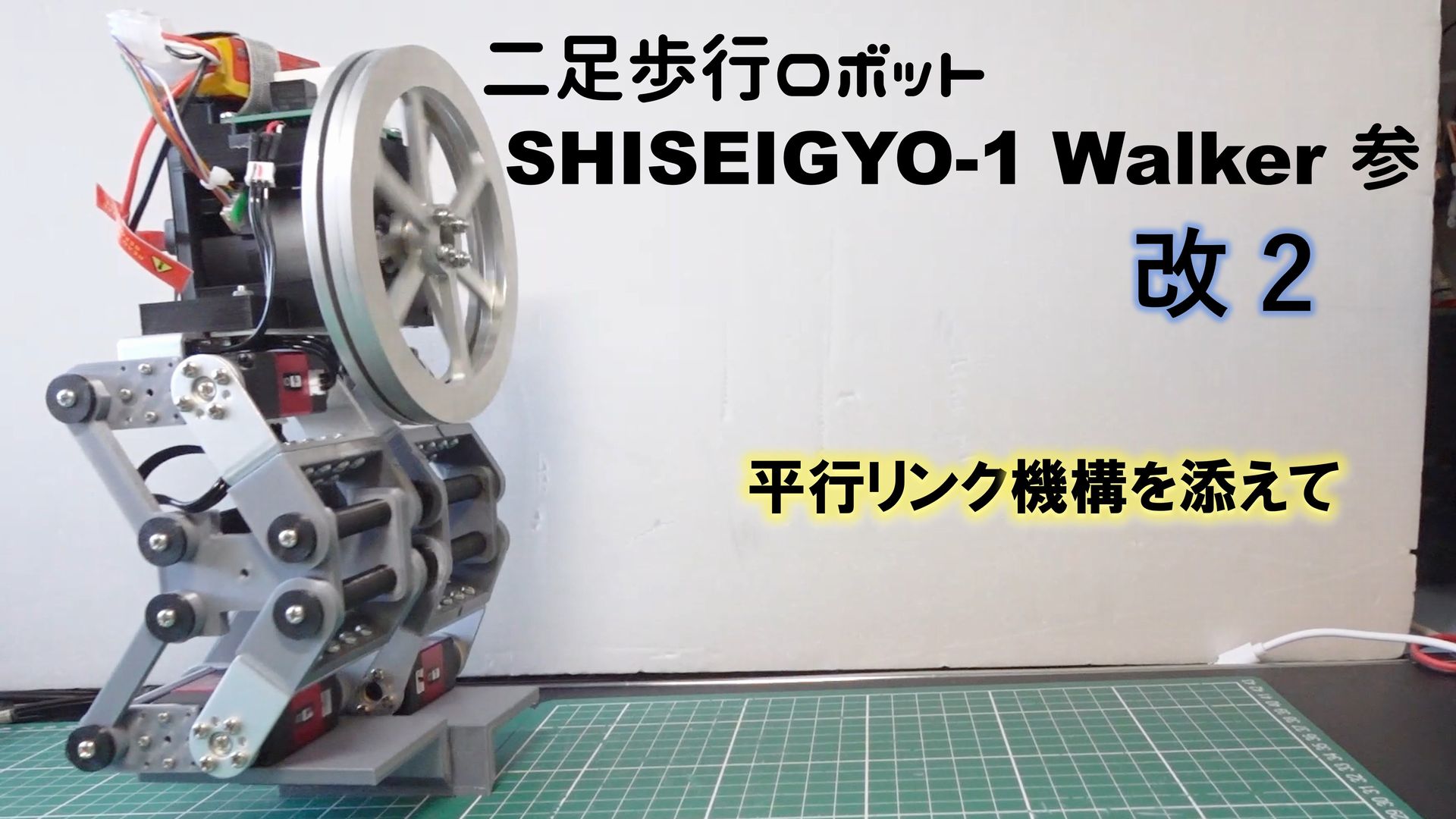
二足歩行ロボット SHISEIGYO-1 Walker 参 改 2
前回はSHISEIGYO-1 Walker 参 の足の構成を再検討し、2足歩行動作を実施しました。 https://homemadegarbage.com/onewalkersan07/ ここでは更に足の構成を再々検討しましたので報告します。 平行リンク機構検討 ...
電子工作 2023.2.22 お父ちゃん ![]()