
逆運動学
ロボット犬『Mini Pupperミニぷぱ』ATOM Matrix で動作再検討
前回はコントローラにATOM Matrixを採用してIMUセンサによるバランス制御を実現しました。 https://homemadegarbage.com/minipupper07/ ここではさらに動作の検証を進めましたので報告いたします。 バク転 ↑この...
電子工作 2022.2.15 お父ちゃん ![]()

ロボット犬『Mini Pupperミニぷぱ』を ATOM Matrix で堪能
前回はミニぷぱのコントローラにESP32を採用し、足を自由自在に制御できるようになり4足歩行についての理解を深めました。 https://homemadegarbage.com/minipupper06/ ここではコントローラにIMUを内蔵したATOM Matrixを使用してみましたので報告いた...
電子工作 2022.2.14 お父ちゃん ![]()

ロボット犬『Mini Pupperミニぷぱ』ESP32で歩行動作検討2
前回はESP32で4本の足の制御を実現し4足歩行を学びました。 ここでは更に深堀します。 https://homemadegarbage.com/minipupper05/ 電源コードレス化 前回は5V ACアダプタから電源供給していましたが、ミニぷぱのバッテリ...
電子工作 2022.2.12 お父ちゃん ![]()

ロボット犬『Mini Pupperミニぷぱ』ESP32で歩行動作検討1
前回はラズパイ4とミニぷぱ専用基板での制御を一旦諦め、邪道ですがESP32での逆運動学による足制御を実施しました。 https://homemadegarbage.com/minipupper04// 前回は足1本のみで動作確認しましたが、ここでは足4本を動かして歩行動作を確認しましたので報告い...
電子工作 2022.2.12 お父ちゃん ![]()

ロボット犬『Mini Pupperミニぷぱ』逆運動学で足制御
前回は足を自由に動かすための準備として、ラズパイ4のOS吟味等実施しました。 https://homemadegarbage.com/minipupper03/ ここではさらにカスタマイズを進めて足を逆運動学で自由自在に制御できるようになりましたので報告いたします。 ...
電子工作 2022.2.11 お父ちゃん ![]()

歩行検討2 -シリアルサーボと距離を詰めたい俺7-
前回からシリアルサーボ (KRS3301)を用いて製作した足ロボットの歩行の検討を始めました。 https://homemadegarbage.com/krs06/ [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-3...
電子工作 2022.1.13 お父ちゃん ![]()
歩行検討1 -シリアルサーボと距離を詰めたい俺6-
前回は製作した足を逆運動学で制御して各足を任意の座標に動かせるようにしました。 https://homemadegarbage.com/krs05// ここからはいよいよ歩行の検討にはいります。 足踏み運動 歩行の前にまずは以前に順運動学でやった足踏みを逆運動学...
電子工作 2022.1.11 お父ちゃん ![]()
足を逆運動学で制御 -シリアルサーボと距離を詰めたい俺5-
前回はシリアルサーボ (KRS3301)を用いて製作した足で足踏み動作を実現しました。。 https://homemadegarbage.com/krs04// [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-330...
電子工作 2022.1.10 お父ちゃん ![]()
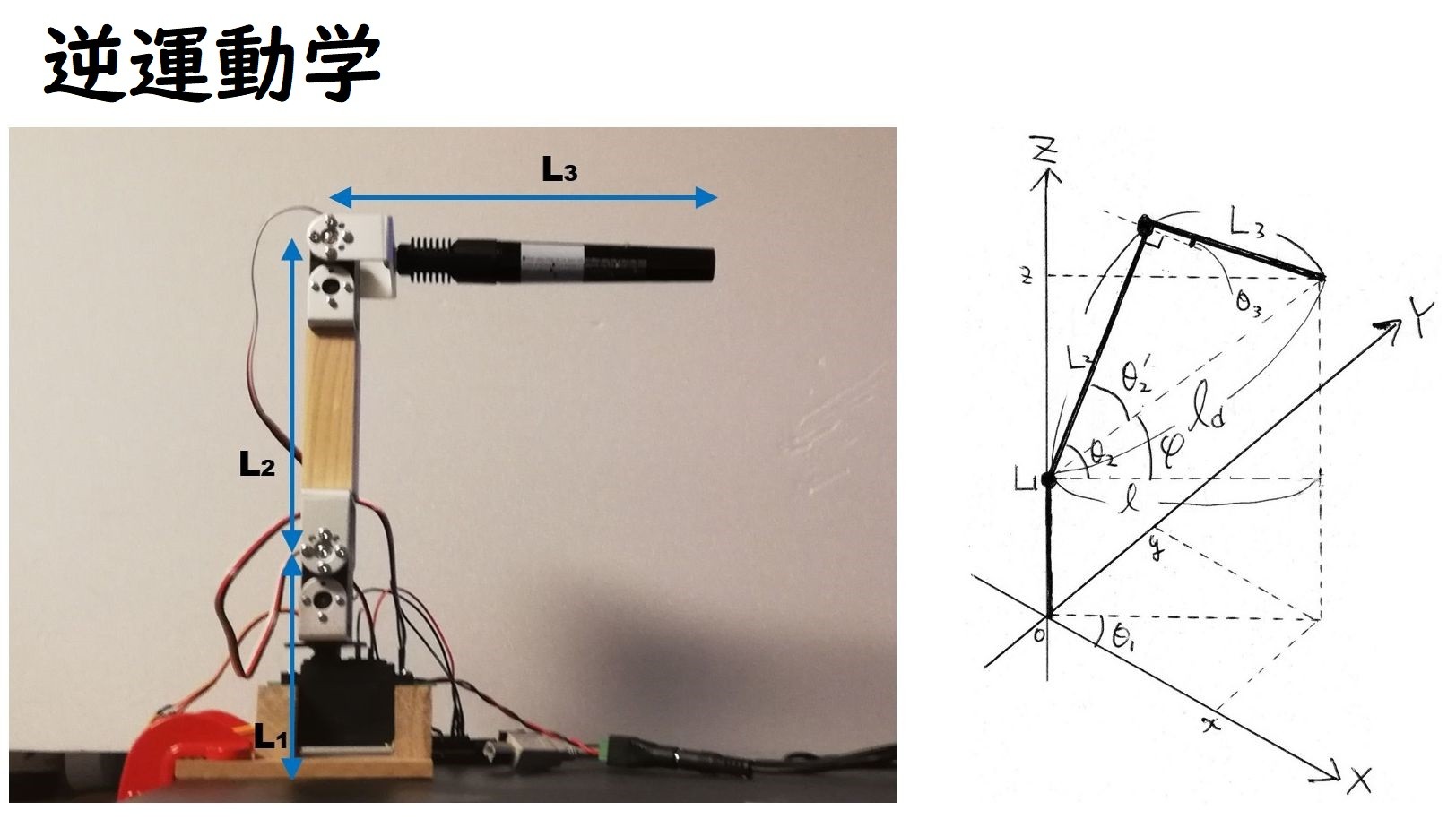
逆運動学 で制御 ーロボットアーム自作への道2ー
さて今回は前回作ったロボットアームを本格的に動かしていきたいと思います。 以下の書籍で逆運動学なるものを知りましたので、その逆運動学でロボットアームを制御します。 [amazonjs asin="427422211X" locale="JP" title="ROBO-ONEにチャレンジ! 二足歩...
Advent Calendar / ロボットアーム / 電子工作 2019.12.9 お父ちゃん ![]()