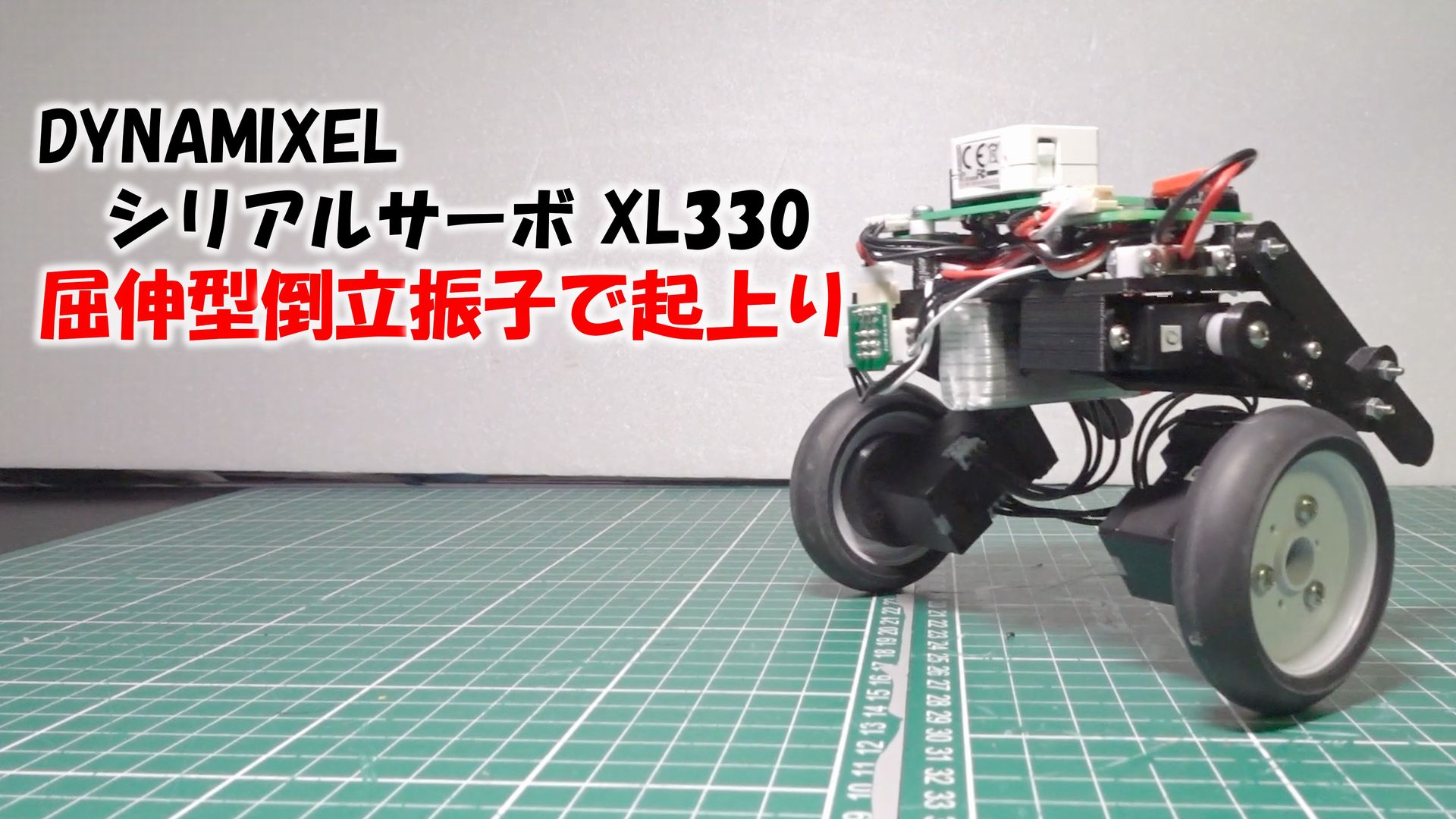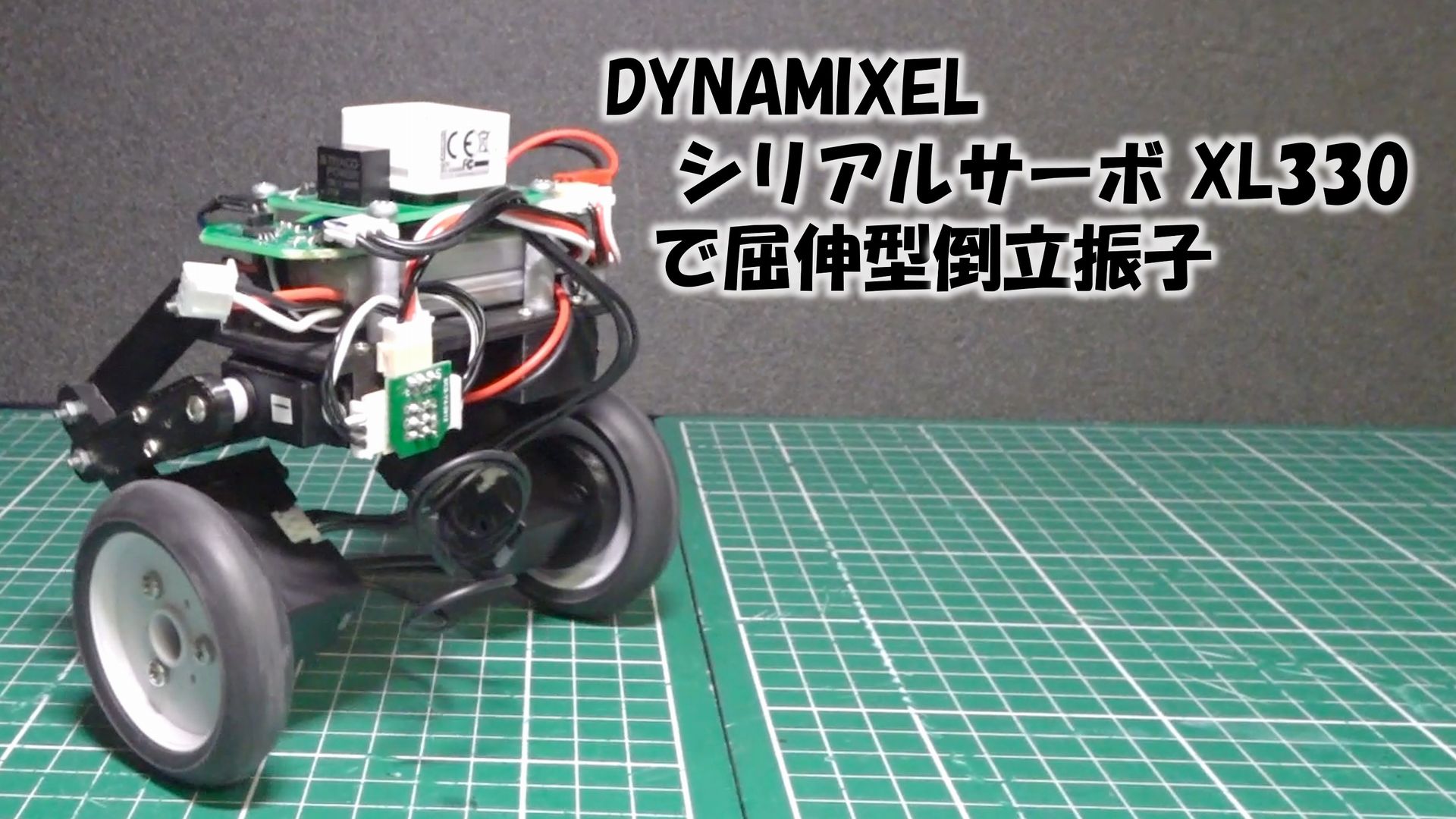
DYNAMIXEL シリアルサーボ XL330 で 屈伸型倒立振子
本記事にはアフィリエイト広告が含まれます。
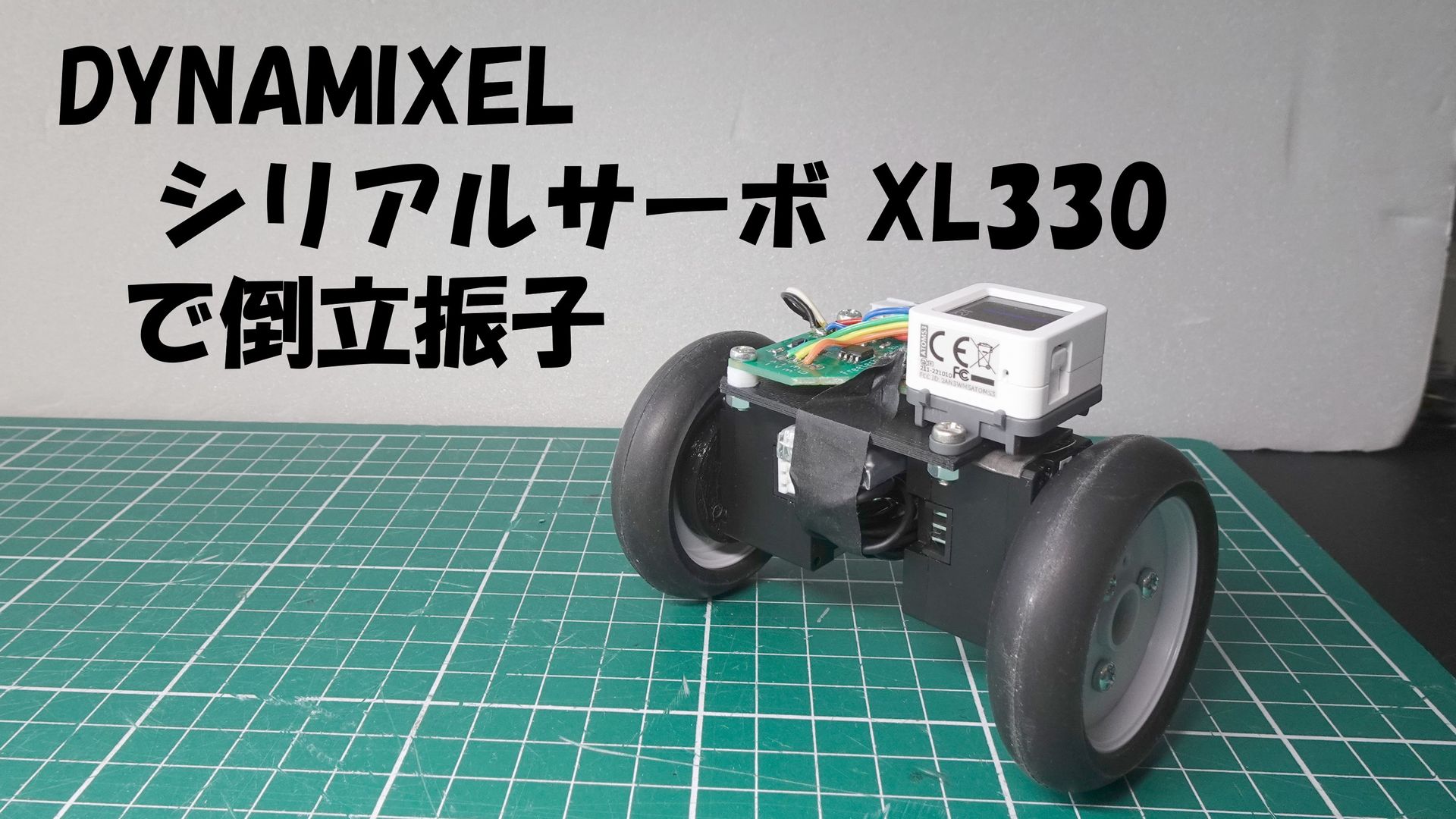
前回は DYNAMIXEL シリアルサーボモータ XL330-M077-T を用いて倒立振子を製作しました。
XL330-M077-T が非常に高速で応答性も良かったため、とても良い倒立振子が仕上がりました。
これに大変気をよくした私は屈伸型への応用に取り組みましたので報告いたします。
目次
屈伸型倒立振子
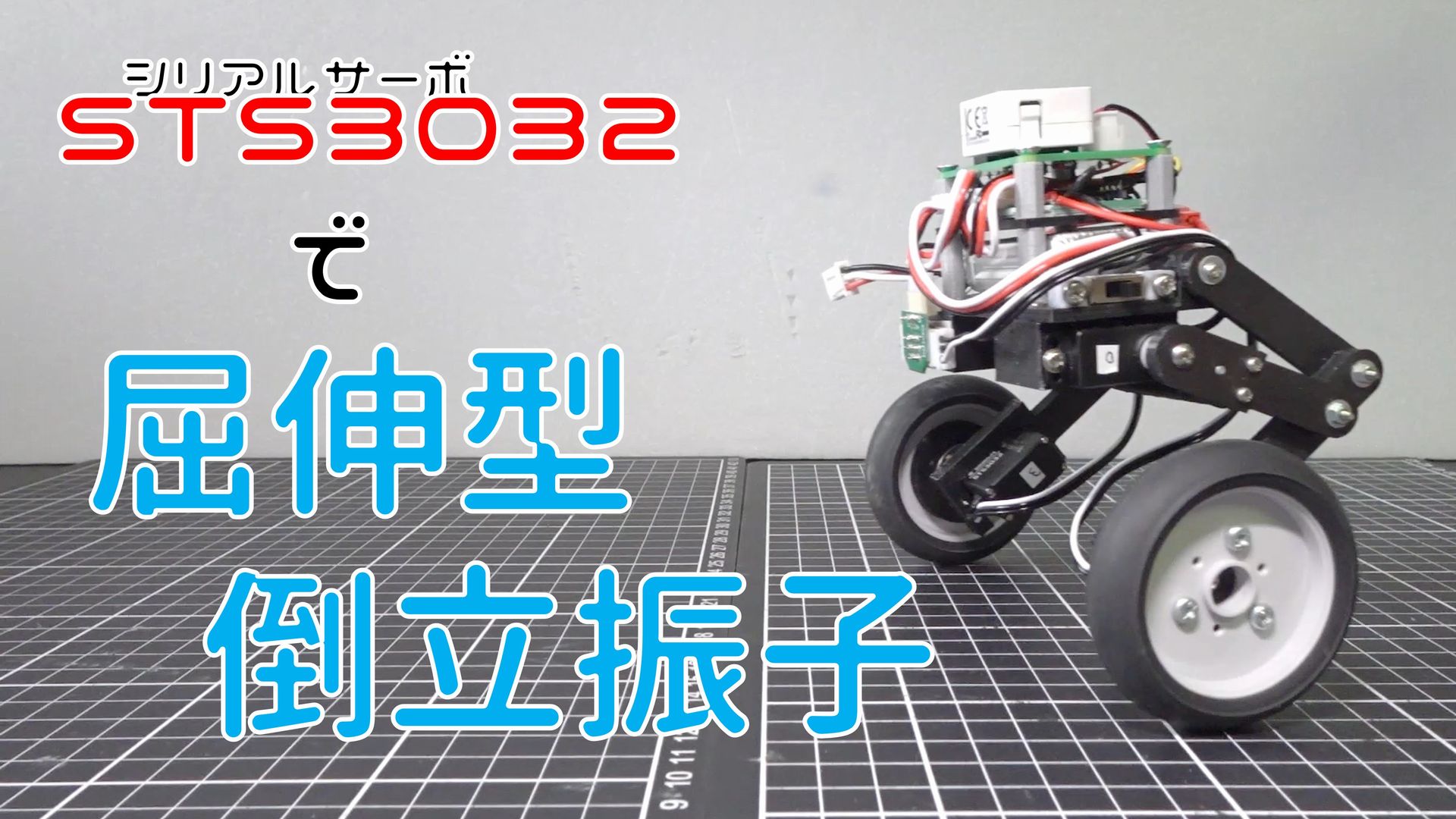
屈伸型の倒立振子は以前 Feetechのシリアルサーボ STS3032を用いて製作しました。
ここで若干ホイール回転速度不足を感じていたので、ホイール駆動用サーボをXL330に替えてみようと思います。

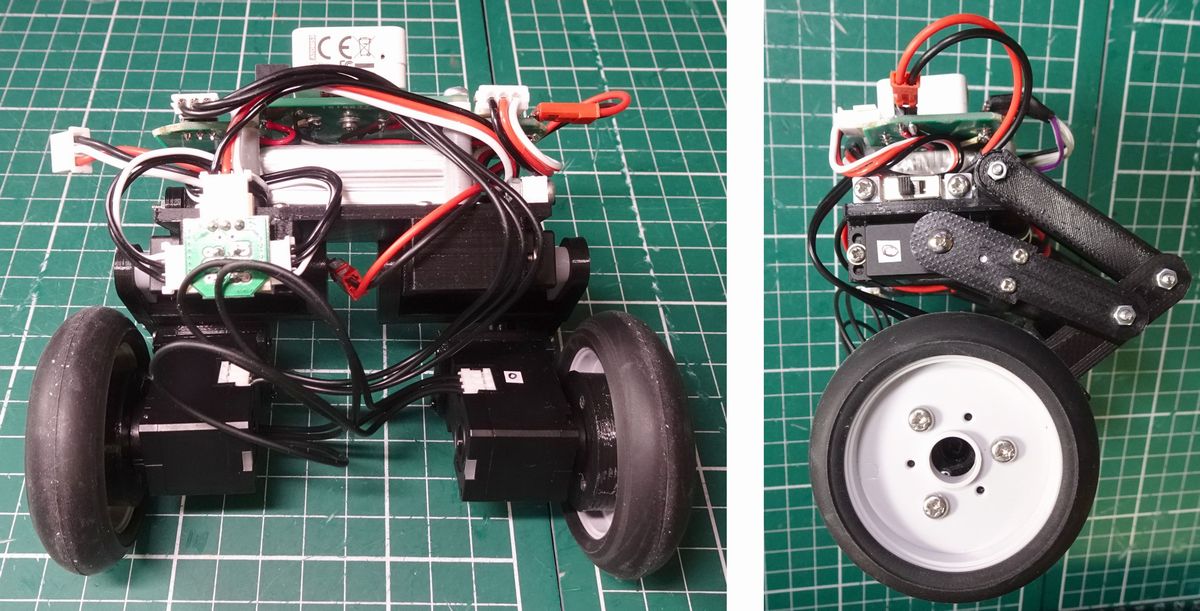
組立て
屈伸用にSTS3032 を使用し ホイール用にXL330を使用するため、それぞれ駆動用に変換基板を2個搭載しています。
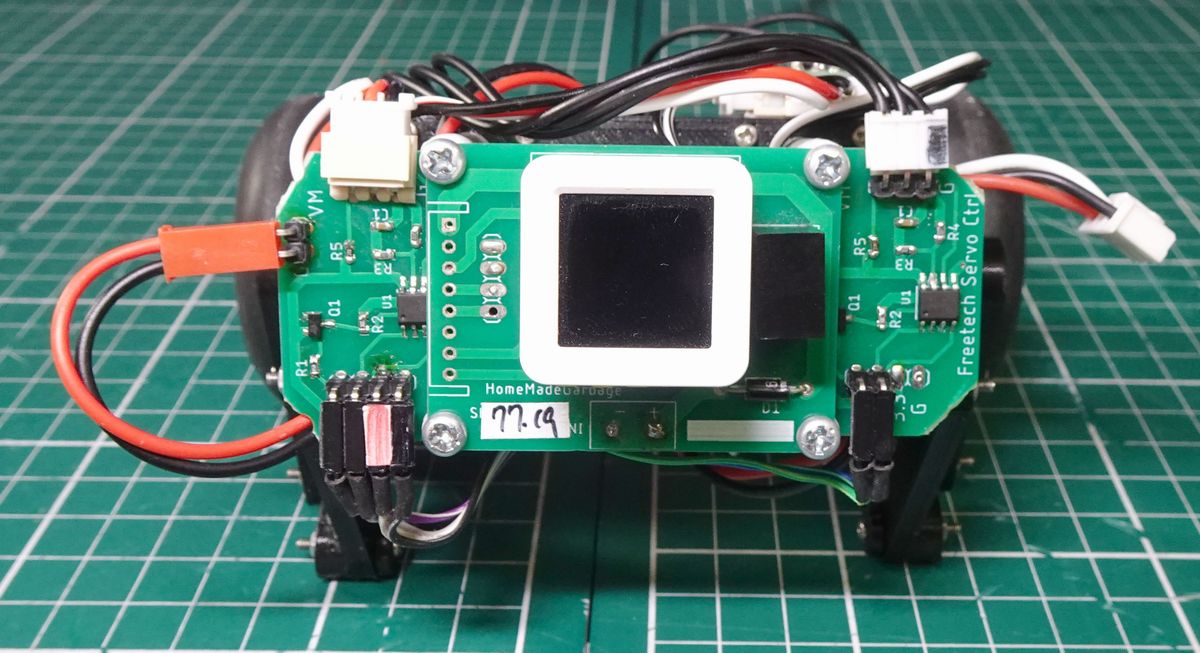
電源には2セルのLiPoバッテリを使用

STS3032にはバッテリをそのまま電源として使用して、コントローラのATOMS3とXL330には5Vに降圧して電源供給しました。
動作
無事に動作
DYNAMIXELとFeetechのちゃんぽん pic.twitter.com/0Iol45FZv8
— HomeMadeGarbage (@H0meMadeGarbage) November 24, 2023
調整してジャンプ動作も確認できました 。
少しだけのジャンプ pic.twitter.com/024t4IE8fQ
— HomeMadeGarbage (@H0meMadeGarbage) November 26, 2023
ジャンプ pic.twitter.com/ZA8cXOE4xl
— HomeMadeGarbage (@H0meMadeGarbage) November 27, 2023
屈伸型でもXL330の性能が発揮され自由自在の移動動作が実現できました。
おわりに
ここではホイール駆動用にXL330を採用して屈伸型倒立振子を製作しました。
高性能サーボ XL330のおかげで大変良い仕上がりとなりました。
FeetechとDYNAMIXELのシリアルサーボを同時に使用するという あまり行儀が良いとは言えない構成ですが、それもまた面白いなと感じております。
シリアルサーボはUART通信で回転制御やセンシングができるので部品点数や配線が減って非常に便利です。
さらに倒立振子まで実現できるとあれば最高と言って良いのではないでしょうか。
しばらくこのXL330に頼ることになりそうです。