4脚ロボットの製作
本記事にはアフィリエイト広告が含まれます。
4脚ロボットとしましては、これまでにロボット犬や Wheel-Legged Robot を製作しました。
これらの製作を経てあらためて4脚ロボットの検討を実施したいと思いたちました。
このクモ形式の足
前進後進で重心が変わらないので大変バランスが良い
もう少しつっこんで検討してみましょう pic.twitter.com/jUvB3zROex— HomeMadeGarbage (@H0meMadeGarbage) February 20, 2024
さて本製作でネクストレベルに行けるのでしょうか?
目次
ロボット犬の復旧
まずは以前製作したロボット犬を復旧させます。別製作に使用していたので再度部品をとって組みたてます。
冷凍小分けにしていた食材でカレーにします。#電子工作界の栗原はるみ pic.twitter.com/Ua3nww23Y4
— HomeMadeGarbage (@H0meMadeGarbage) February 26, 2024
無事に復旧
できた pic.twitter.com/aKUCOZkyRA
— HomeMadeGarbage (@H0meMadeGarbage) February 26, 2024
バク転動作もバッチリです。
お見事! pic.twitter.com/ej7kAMqlf6
— HomeMadeGarbage (@H0meMadeGarbage) February 26, 2024
シリアルサーボ通信基板の省略
本ロボットは足にシリアルサーボ STS3032 を使用しており、通信変換基板を介してUARTでマイコン制御しています。
UARTシリアル通信によってサーボとのデータ送受信が可能となりますが、本ロボットではサーボからのデータフィードバックは使用していません。
そこでここでは直接サーボにデータ送信できる以下のライブラリを使用させていただき変換基板の省略を実施しました。。

シリアルサーボ通信変換基板を省略して、マイコンATOMS3で直接通信に変更
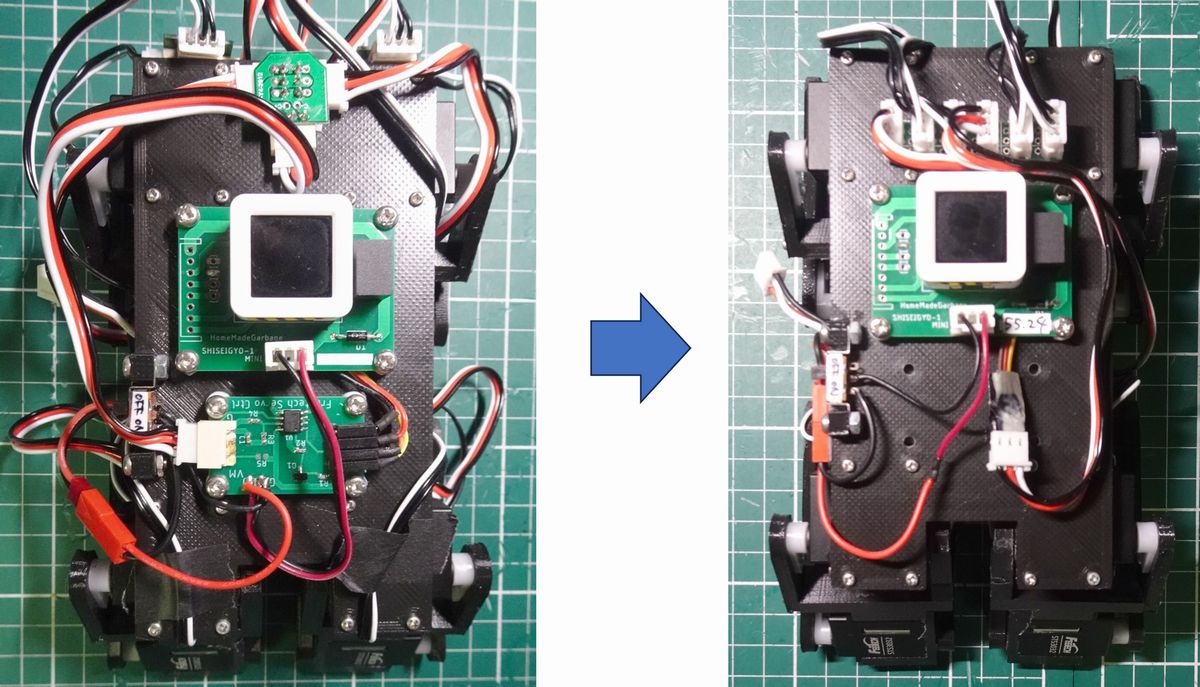
基板を省略しても問題なくこれまで通りの動作が確認できました。
シリアルサーボ ATOMS3直接駆動で動作問題なし
サーボからの受信を使っていないシーンでも変換基板使っていた時の俺は上手に笑えていなかった。今では目の前の景色すべてが違ってみえる pic.twitter.com/6pkDxptVvF
— HomeMadeGarbage (@H0meMadeGarbage) February 26, 2024

マイコン変更
マイコンとしてATOMS3を使用していますが、将来的にはPSコントローラとかで動かしたいのでATOM Matrixに変更します。
ESP32-S3はBLEのみでBluetooth Classicが使用できないためです。
ATOM Matrix で2軸傾斜計 pic.twitter.com/nyAjlvD0mA
— HomeMadeGarbage (@H0meMadeGarbage) February 26, 2024
ATOM Matrixでもこれまで同様の動作を確認できました。
将来的にはPSコントローラとかで動かしたいので
ATOMS3からATOM Matrixに変更 pic.twitter.com/qsRwXCQFP4— HomeMadeGarbage (@H0meMadeGarbage) February 27, 2024
足構成変更
いよいよ今回の目的である足の構成を変えた4脚ロボットの検証を実施します。
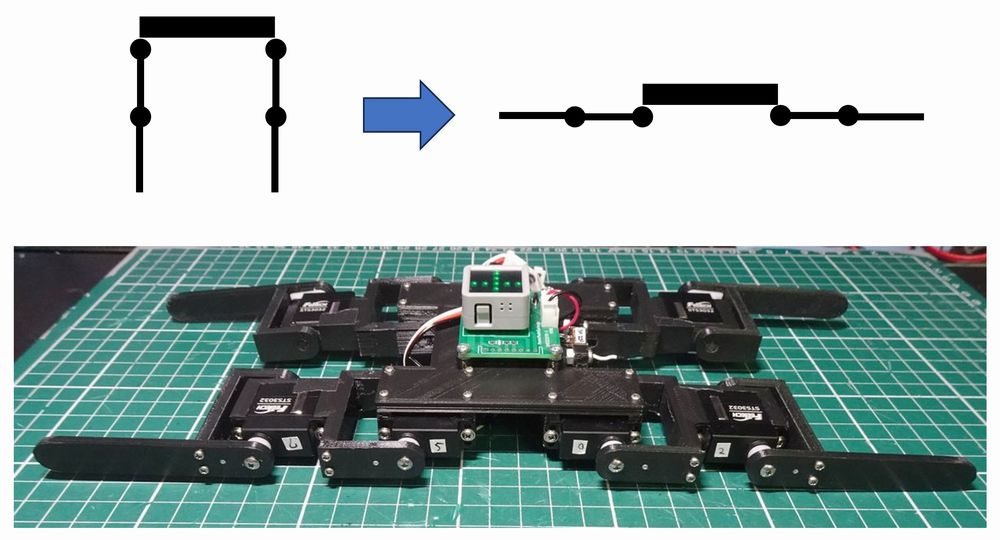
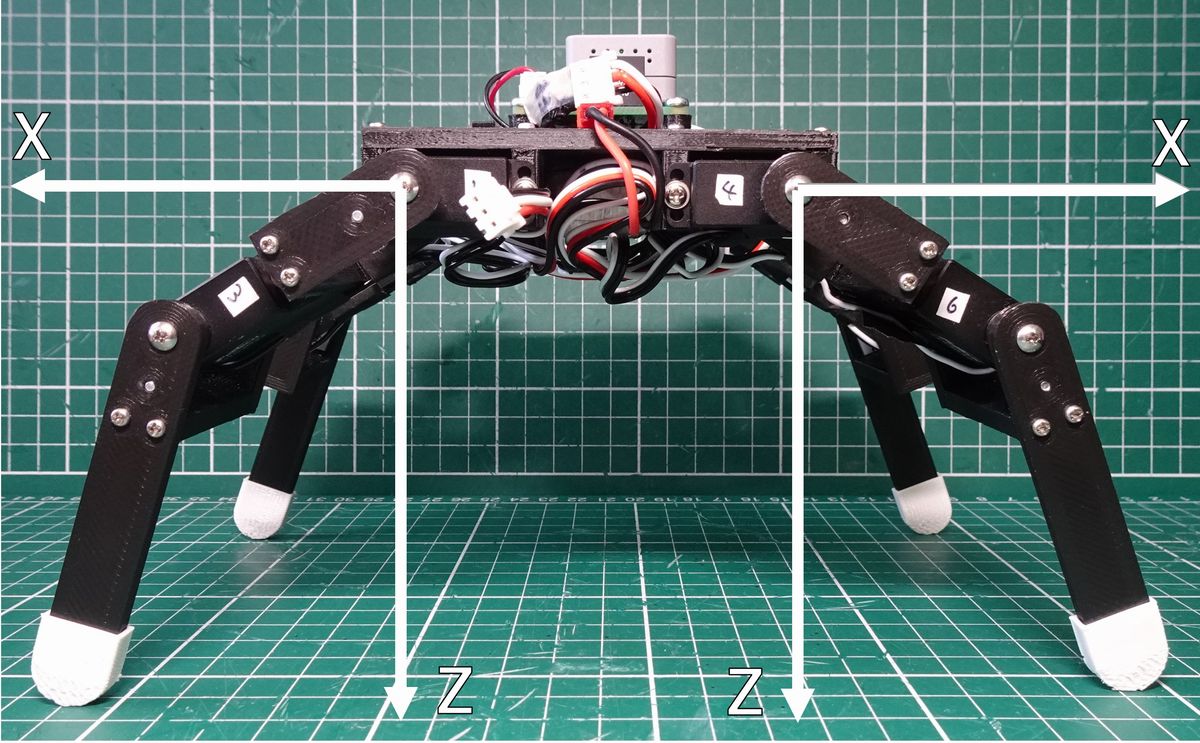
前方の足を逆関節にしてクモのような構成にします。
クモ型に変更 pic.twitter.com/9NlToIQrvA
— HomeMadeGarbage (@H0meMadeGarbage) February 27, 2024
クモ型の構成にすることによって前後対称性の恩恵を受け移動時のバランスが非常に良くなりました。
こういった4脚ロボットの場合 足の付け根にもサーボを追加してロール軸移動させやすくする場合が多いですが 今回の構成でも旋回動作はできております。
なによりサーボ8個で構成できるので経済的です。
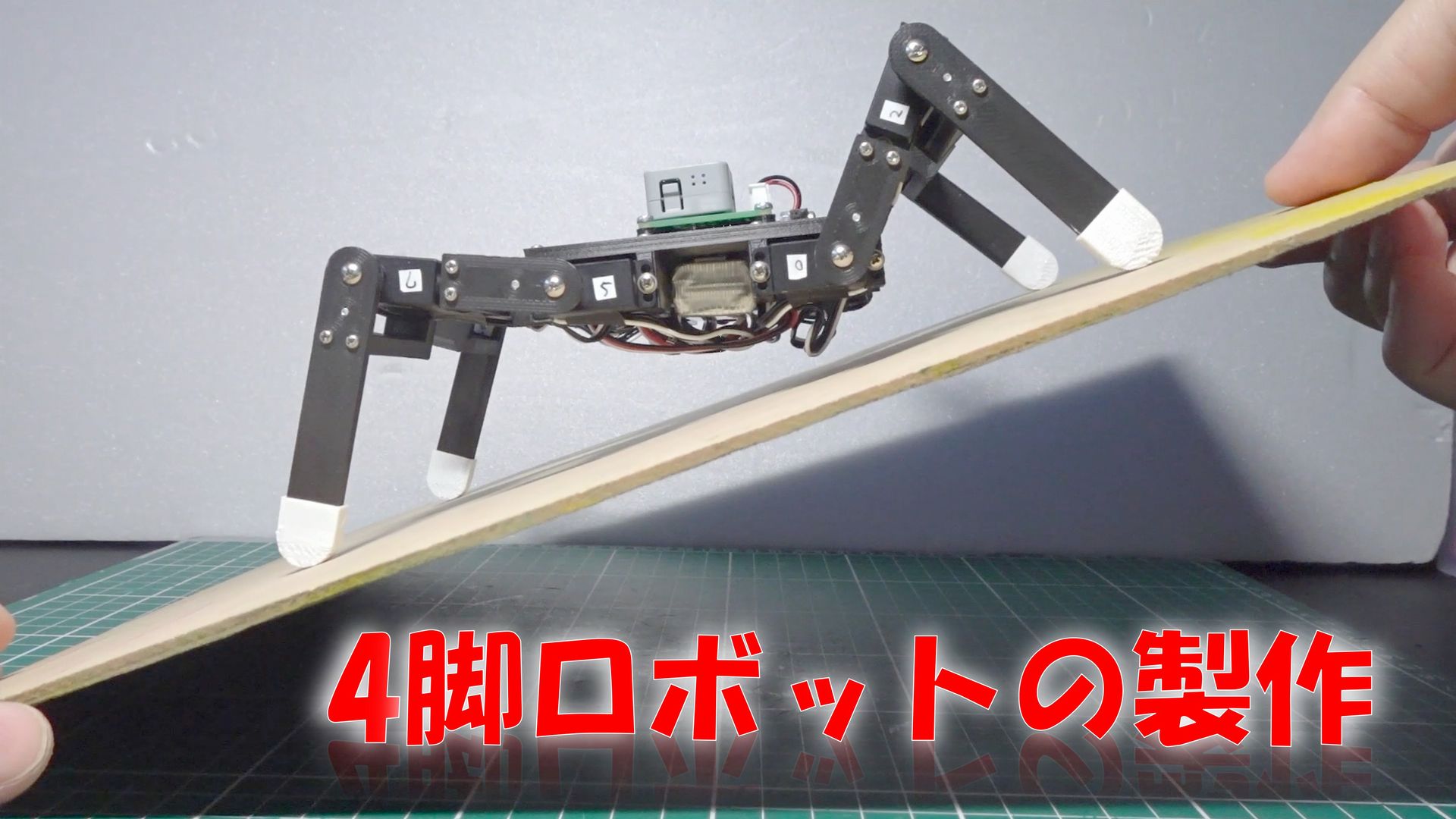
バランス動作も大胆に追従が可能です。
滑るから靴履かせた pic.twitter.com/YPpdEq3fbV
— HomeMadeGarbage (@H0meMadeGarbage) February 27, 2024
初期姿勢変更
初期姿勢 (すべてのサーボの指定角が0°) を以下のように変更しました。
初期姿勢の変更に伴い逆運動学の式も変更となります。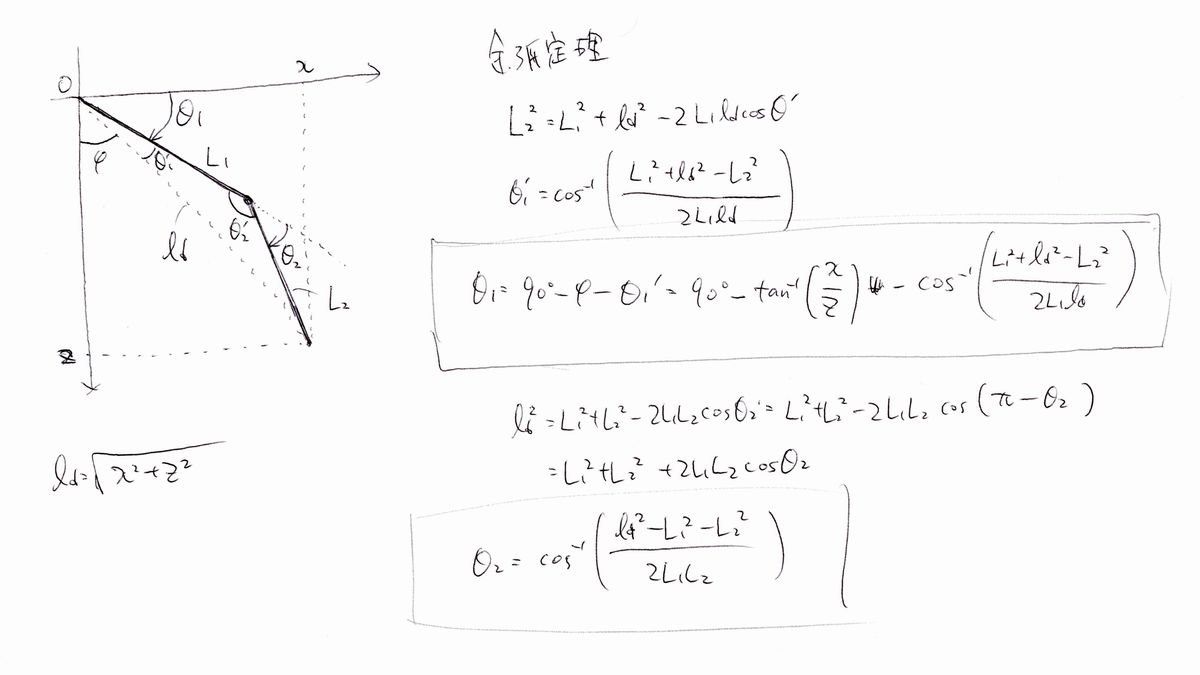
各足の付け根を原点として、高さと前後の座標を指定して上記の式で運動させます。
初期姿勢を変更したことによって機体の反転時にサーボ指定角度の符号変えるだけで同じ座標指定シーケンスでの動作制御が可能となります。
こういうシステムはいかがでしょう pic.twitter.com/tX6xMcjye7
— HomeMadeGarbage (@H0meMadeGarbage) February 28, 2024
ひっくり返しても pic.twitter.com/uYKXFydtXd
— HomeMadeGarbage (@H0meMadeGarbage) February 28, 2024
4脚ロボット動作
もろもろ変更を加えて、現状で私が最も良い構成と考える4脚ロボットが完成いたしました。
ロボット犬と同様にバク転も可能です。
あえてイヌネコをモティーフにしないことで ここまで自由になれた pic.twitter.com/yAJB0RStsk
— HomeMadeGarbage (@H0meMadeGarbage) February 28, 2024
おわりに
ここでは4脚ロボットの再検討を実施し、現状の私の範囲内での最適解が出せたかなと思っております。
bacteriophage pic.twitter.com/TwgchkKrPX
— HomeMadeGarbage (@H0meMadeGarbage) February 28, 2024
今後は物理コントローラによる制御やサーボのグレードを下げた廉価版の検証など進めていきたいと考えております。
それではまた