QDDモータでロボット
ー ROBSTRIDE 05 ー
本記事にはアフィリエイト広告が含まれます。
前回はQDD ロボットモータ ROBSTRIDE 05 を入手し もろもろおいじりして基本動作を理解しました。

ここでは前回の姿勢制御モジュールに続いて足ロボを製作してQDDモータの性能を楽しみました。

目次
MuJoCo
足はMuJoCoで物理Sim.をかましながら Fusion360 で調整・設計することにしました。
MuJoCoで簡易的に動作確認 (モータのモデルパラメータは適当)
#MuJoCo pic.twitter.com/becPV0d7X2
? HomeMadeGarbage (@H0meMadeGarbage) September 11, 2025
リンク機構で足を構築
まさかねぇ#MuJoCo pic.twitter.com/bfs8BehrdQ
? HomeMadeGarbage (@H0meMadeGarbage) September 11, 2025
SIm.上でモータ角度を1クリックで動かして バク転成功
かなり高速回転で現実的ではないが足の構造としてはイケてそうなのでコレで設計Fix。
実機
設計した足パーツを3Dプリントして組み立てました。
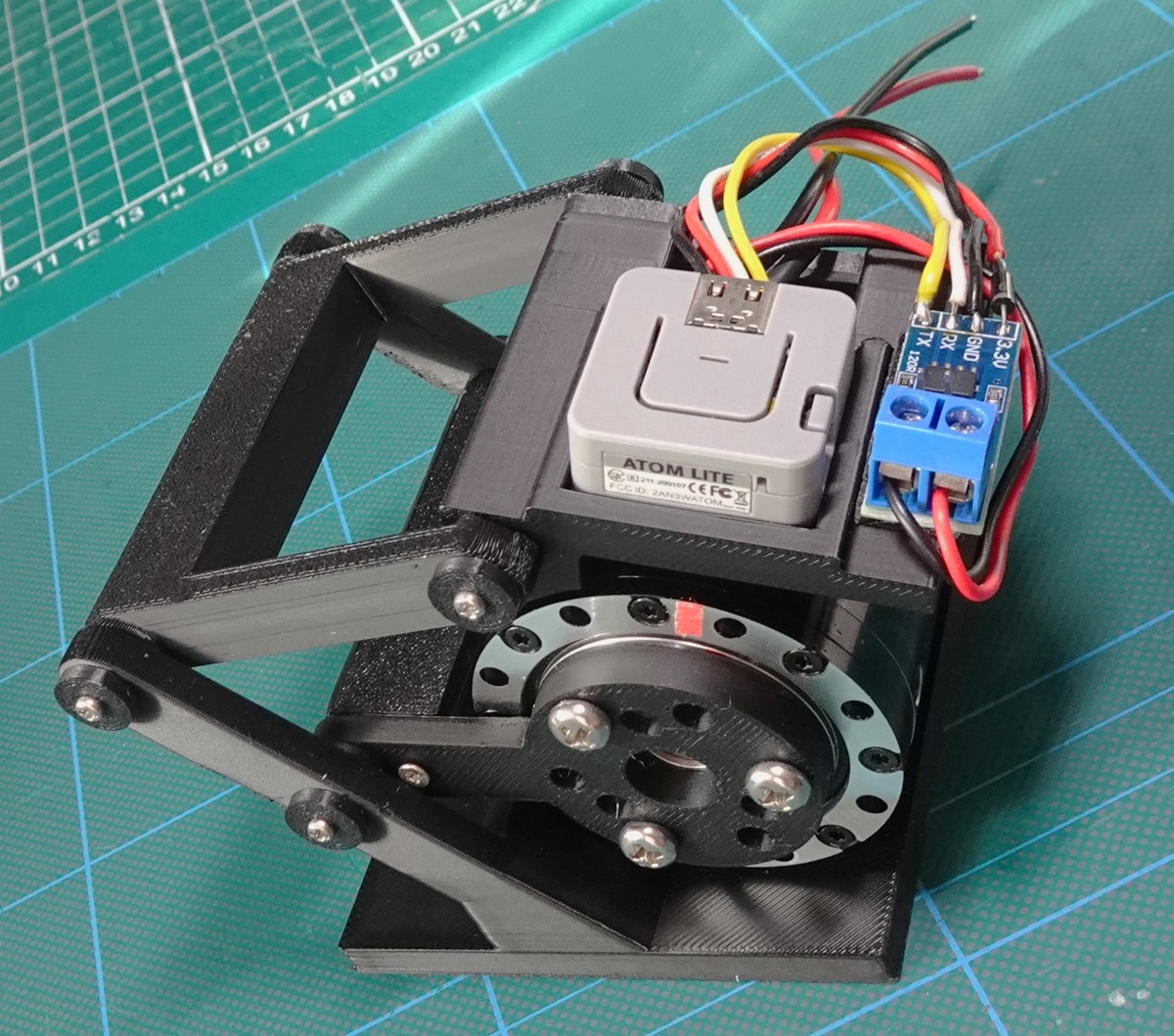
コントローラはM5Stack ATOM

CANモジュールを介してQDDモータ ROBSTRIDE 05と会話

Sim2Real
モータの角度指定回転で実機動作確認
ROBSTRIDE 05 pic.twitter.com/qbUQksZyeC
? HomeMadeGarbage (@H0meMadeGarbage) September 12, 2025
上のMuJoCo Sim.ではモータ角度を一瞬で回しているのでバク転したけど
実機ではさすがにバク転できませんでした。
まぁ電源配線とかも邪魔だし。。
ROBSTRIDE 05 には角度指定回転は上限 50deg/sの速度制限がありましたが、
上の動作はそこまで高速ではなく電源電圧 15Vではこんなもんなのでしょう。
そこで 家にある安定化電源の最大電圧 37Vで再実験
おしい!ROBSTRIDE 05 定格の48Vを印加できればSim. 同様にバク転しそうですね。
バク転へのこだわり
足を伸ばしてのバク転は無理そうなので、動作シーケンスを組んでバク転を実現させます。
こうなりゃ意地です。
あーやっぱ QDDだわ pic.twitter.com/HaIIFnCm2G
— HomeMadeGarbage (@H0meMadeGarbage) September 12, 2025
できた!
足を伸ばしてジャンプ後に空中で足を縮めて、角運動量保存則で角速度を稼ぐ手法で実現させました。
トルクはもちろんQDDの高速応答にも舌鼓を打たせていただきました。
これでもSim2Realやってみた
ROBSTRIDE 05
Sim2Real#MuJoCo pic.twitter.com/bLwjjhxxC1— HomeMadeGarbage (@H0meMadeGarbage) September 13, 2025
このSim2Realは実機にSim.のモータモデルのパラメータ (Kpとか回転速度)をすり合わせるバックアノテート的な目的ね
おわりに
はっきり言うわ。
もう完全にQDDの時代だね
入手して数日で違う景色何度も見せていただきました。
今後は電源が課題かなぁ。。。
48Vとかちょっと取り扱いたくない。サージケアとか大変そう(;´・ω・)
実際15Vでもきつい。。 ついに4セルLiPoバッテリに手を出すか? パワーDCDCで昇圧か?
まぁゆっくり考える。
あと本筋とはズレるけど、この度 MuJoCo でクローズドループ リンク機構のSim.が出来たことが収穫として大きかったです。
MuJoCoでリンク機構
できるっちゃあ できるな pic.twitter.com/4TxqGxfCth— HomeMadeGarbage (@H0meMadeGarbage) September 11, 2025
引き続き、いろいろ学びながらやっていきたいと思います。