電子工作
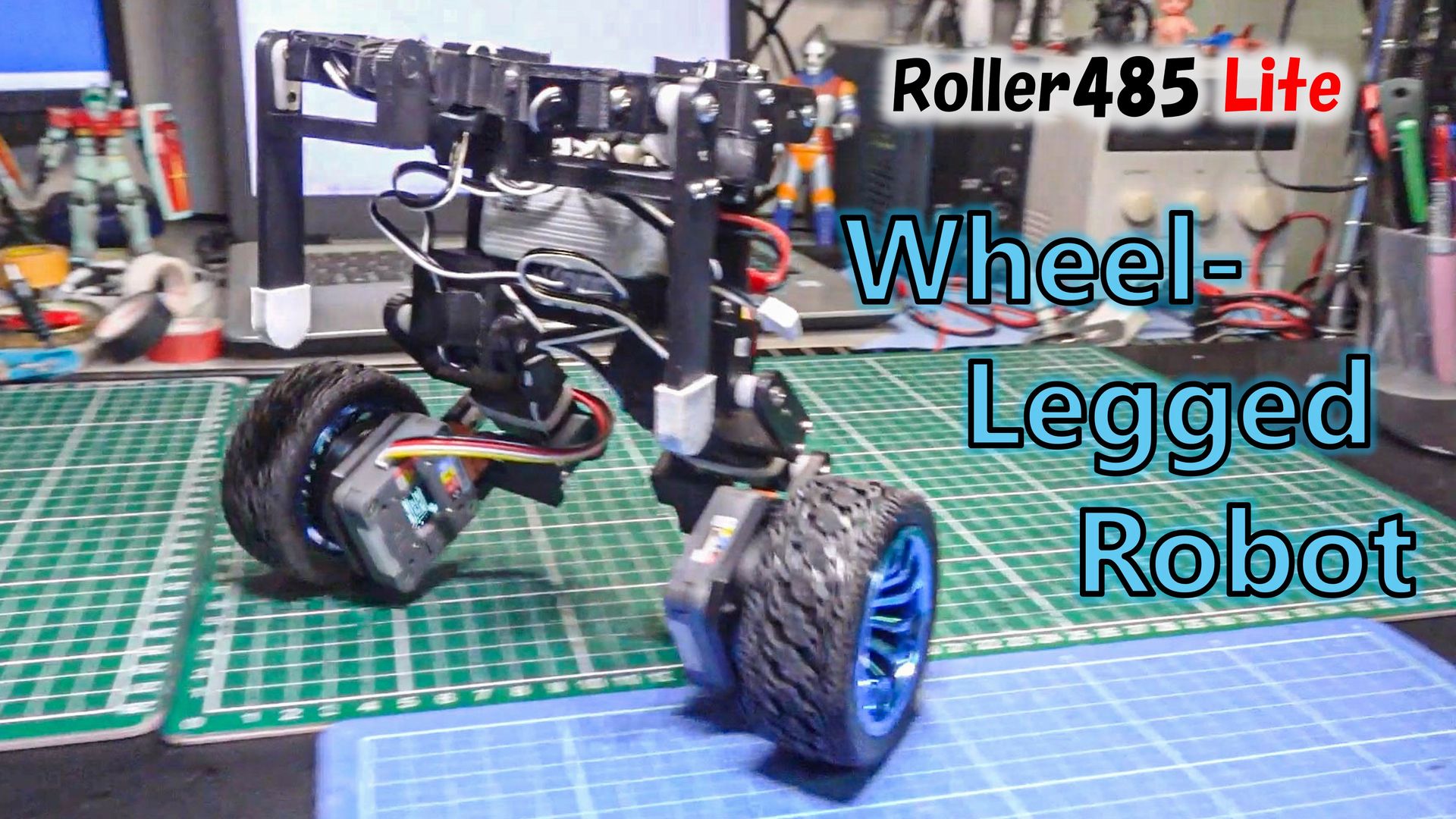
Roller485 で Wheel-Legged Robot
Roller485 Lite ユニットを用いて Wheel-Legged Robot を製作してみました。 以下の動画のようにスクッと立つ動作を実現してみたいと思っていて 高速応答可能なブラシレスモータ搭載のRoller485 の使用を検討してみます。 Swiss-Mi...
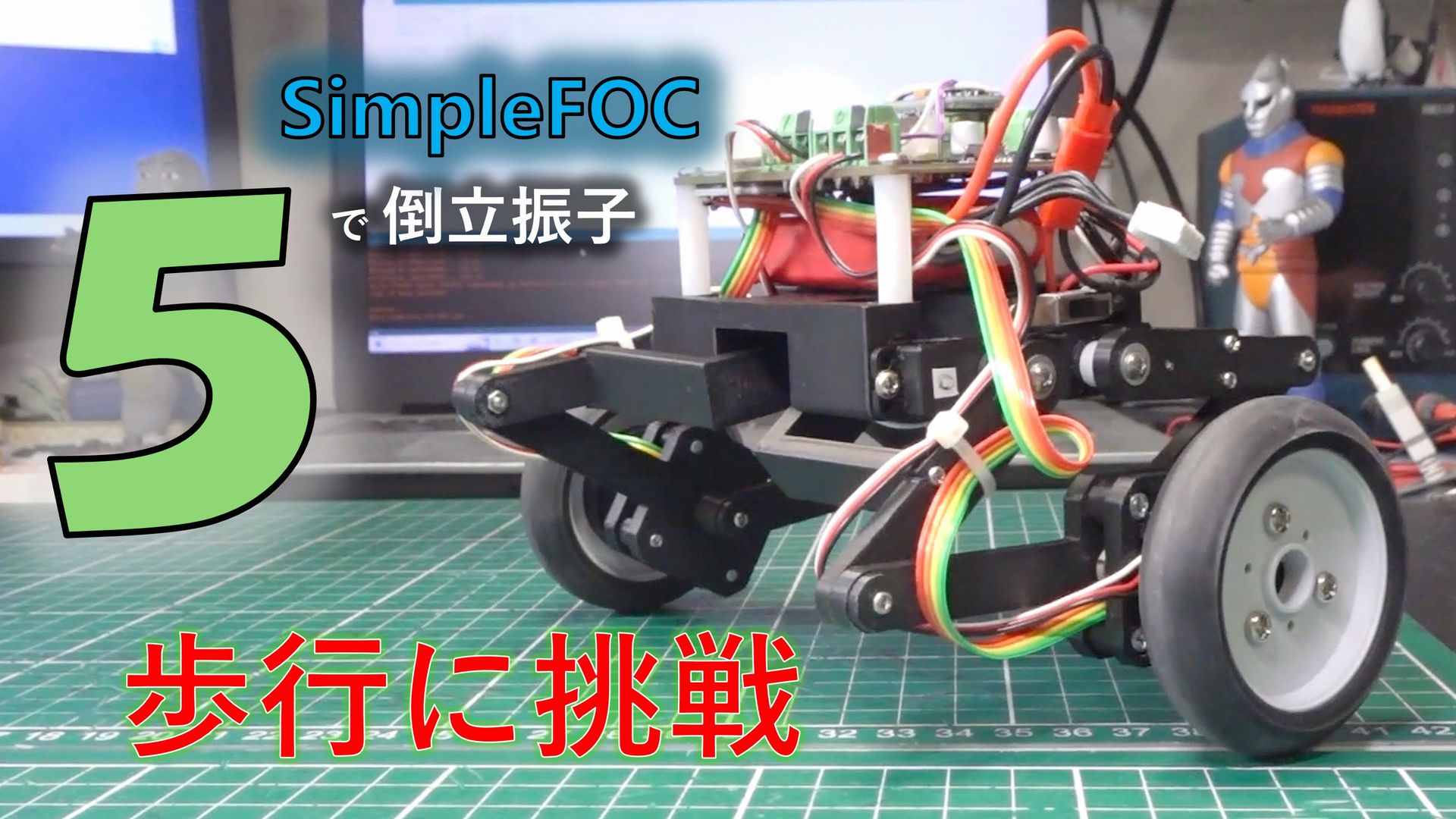
SimpleFOC で倒立振子5 歩行に挑戦
前回は5軸リンクによる屈伸型倒立振子を製作しました。 https://homemadegarbage.com/simplefoc12/ 足を上下に加えて前後にも動かせる特性を活かして今回は歩行に挑戦してみました。 足上げ まずは足上げの確認。 普通に足踏み...
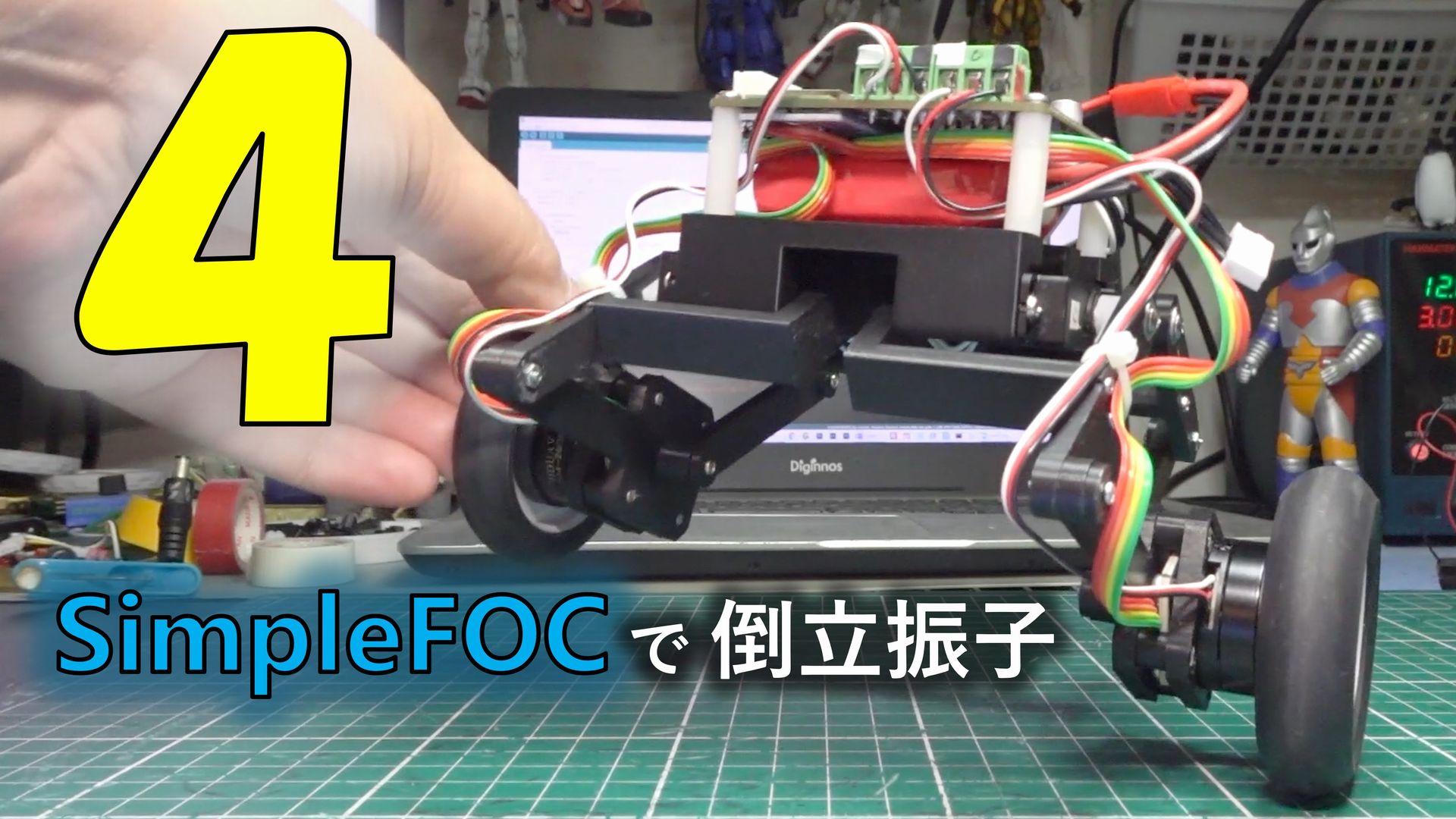
SimpleFOC で倒立振子4
ここ最近はSimpleFOCの勉強に凝っていて、先日もベクトル制御による倒立振子を楽しみました。 https://homemadegarbage.com/simplefoc11/ ↑ここで非常に応答の良い倒立振子を実現できたので、更に検証を進めます。 ...
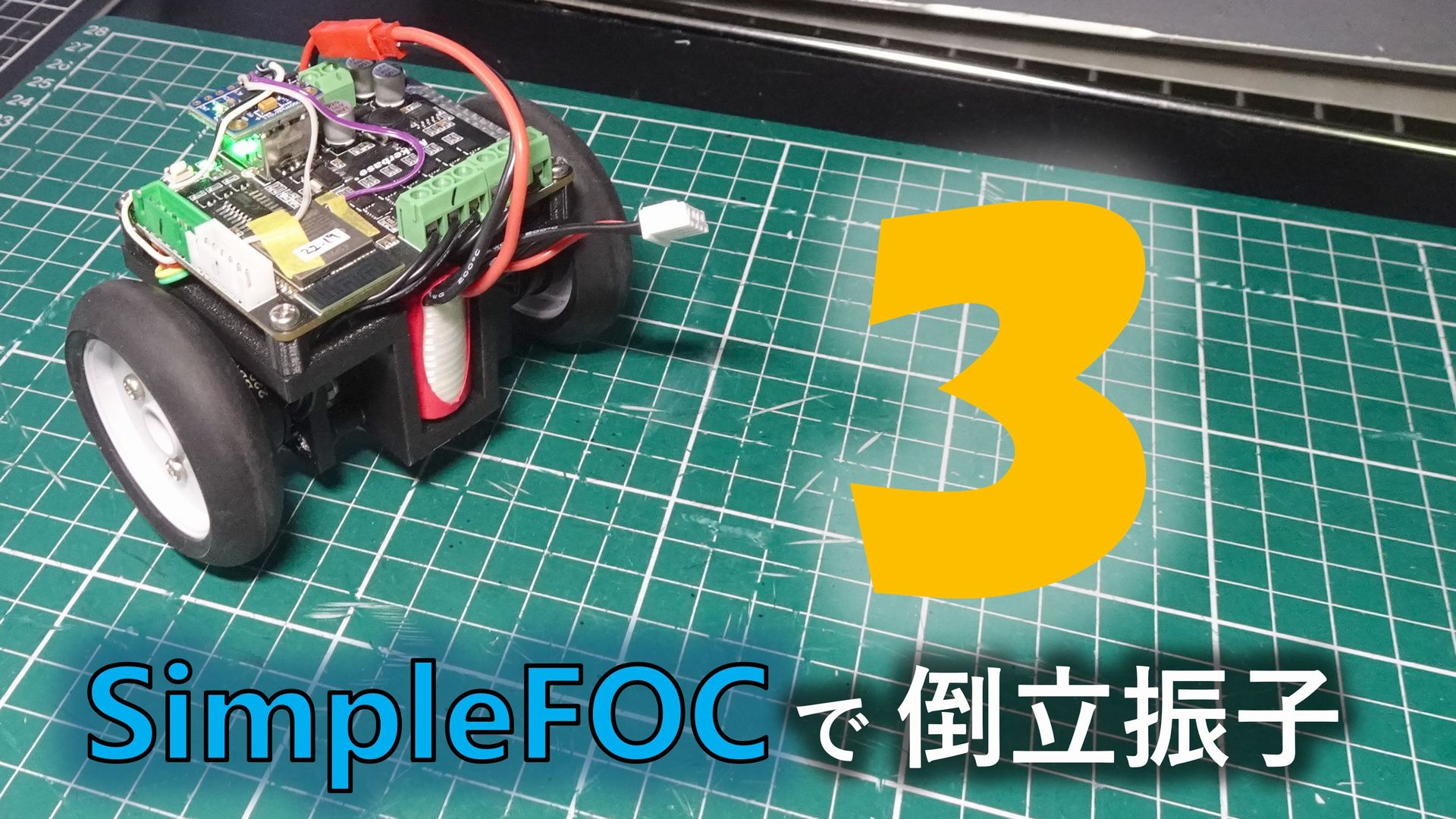
SimpleFOC で倒立振子3
SimpleFOCによる倒立振子ですが、前回の単体記事からI2Cマルチプレクサを追加したりベクトル制御にしたりと変更がありますので 一旦ここで現行の状態をまとめます。 https://homemadegarbage.com/simplefoc05/ 構成 ...
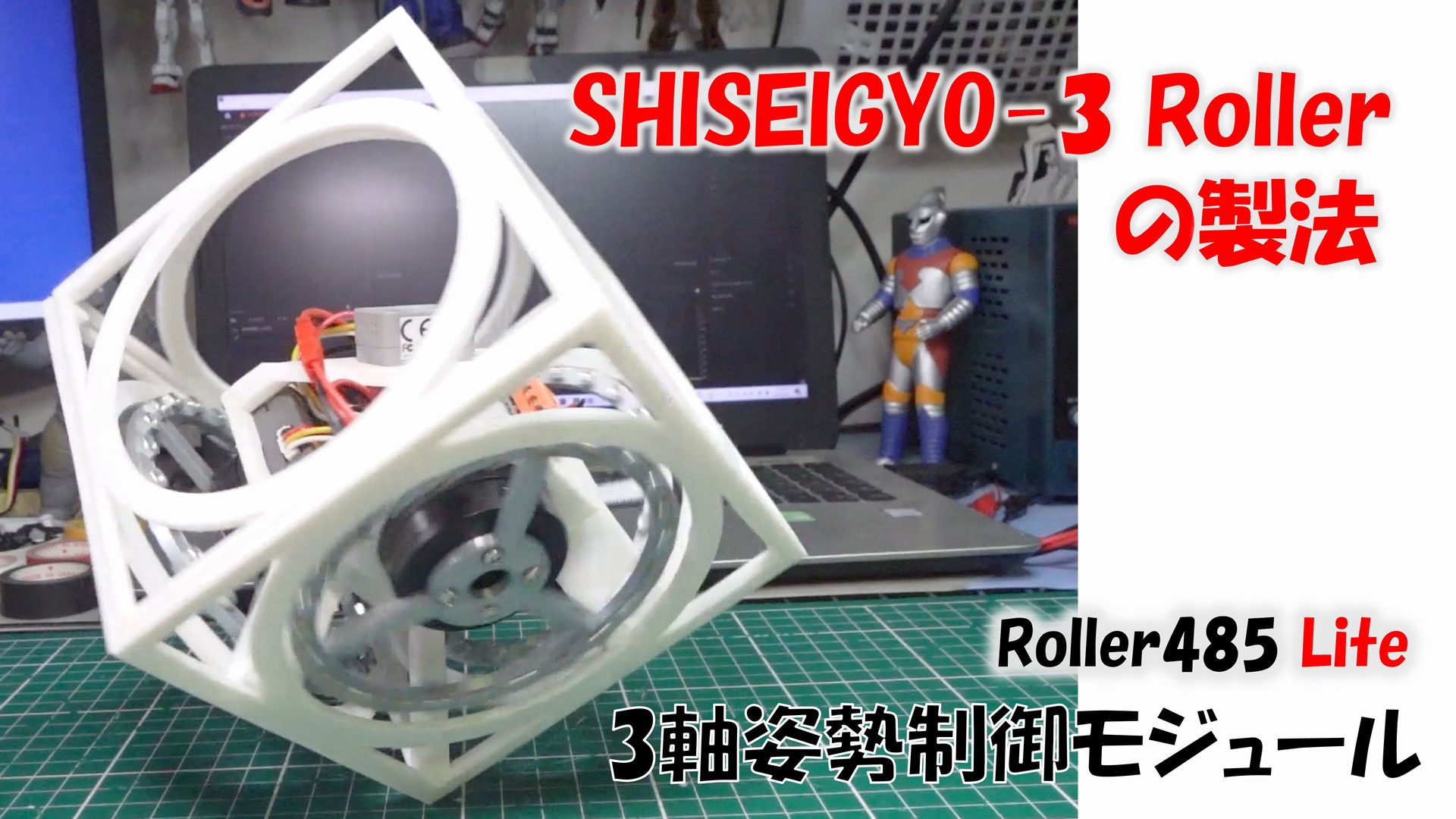
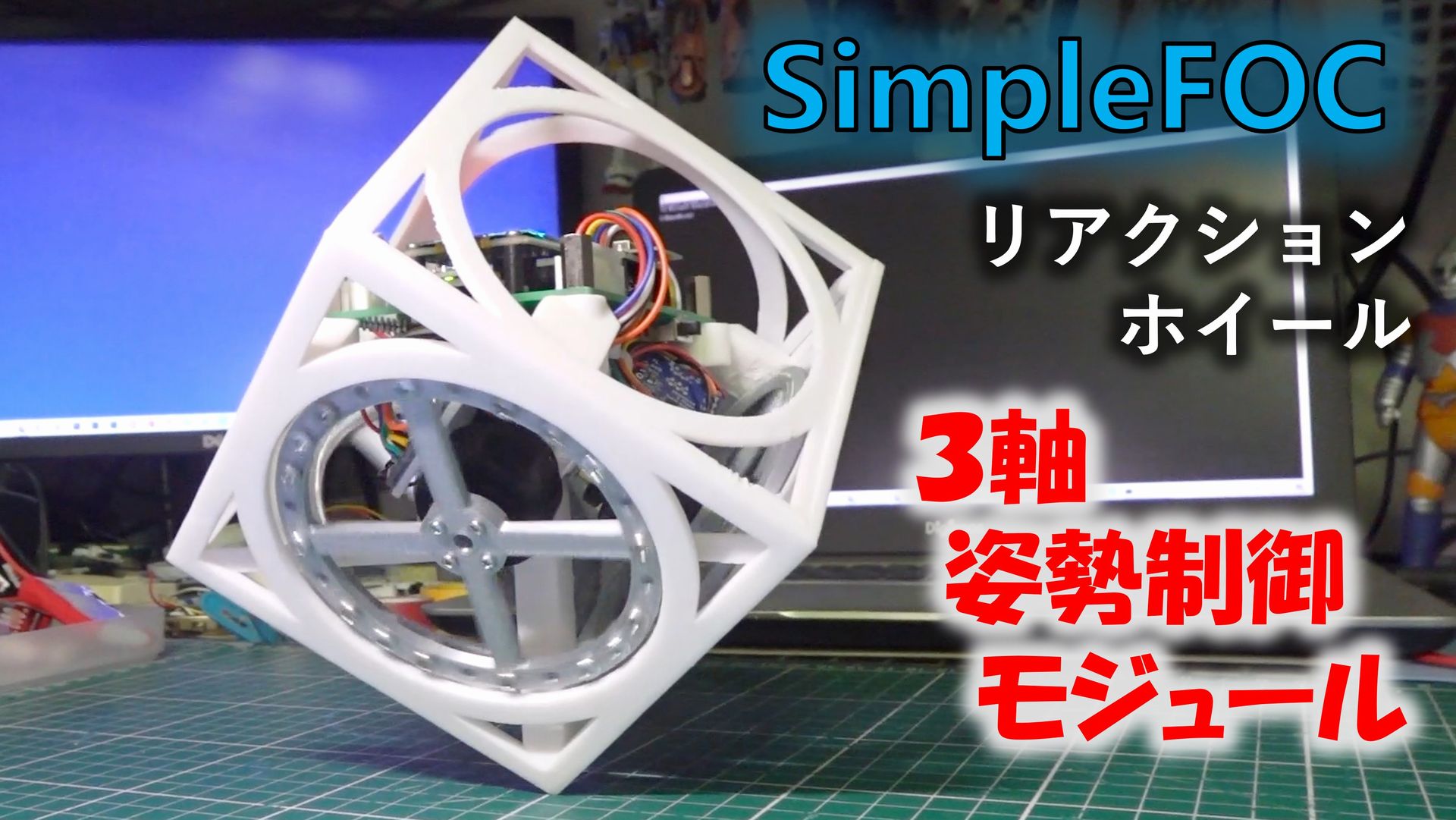
3軸姿勢制御モジュール SHISEIGYO-3 Roller の製法
はじめに SHISEIGYO-3 Roller はRoller485 Lite ユニットを用いた3軸姿勢制御モジュールです。 コントローラとしてIMU内蔵のATOM Matrixを使用し点倒立を実現します。 マイコン内蔵のRoller485 Lite ユニットを用いることで構成が非常にシン...
電子工作 2024.10.22 お父ちゃん ![]()

3軸姿勢制御モジュール SHISEIGYO-3 DC の製法
はじめに SHISEIGYO-3 DC は小型ドローンに使用されるコアレスモータを採用した 1辺82mmの小型3軸姿勢制御モジュールです。コントローラとしてIMU内蔵のATOMS3を使用し点倒立を実現します。 SHISEIGYO-3 DC coming soon... pic.twitte...
電子工作 2024.10.21 お父ちゃん ![]()
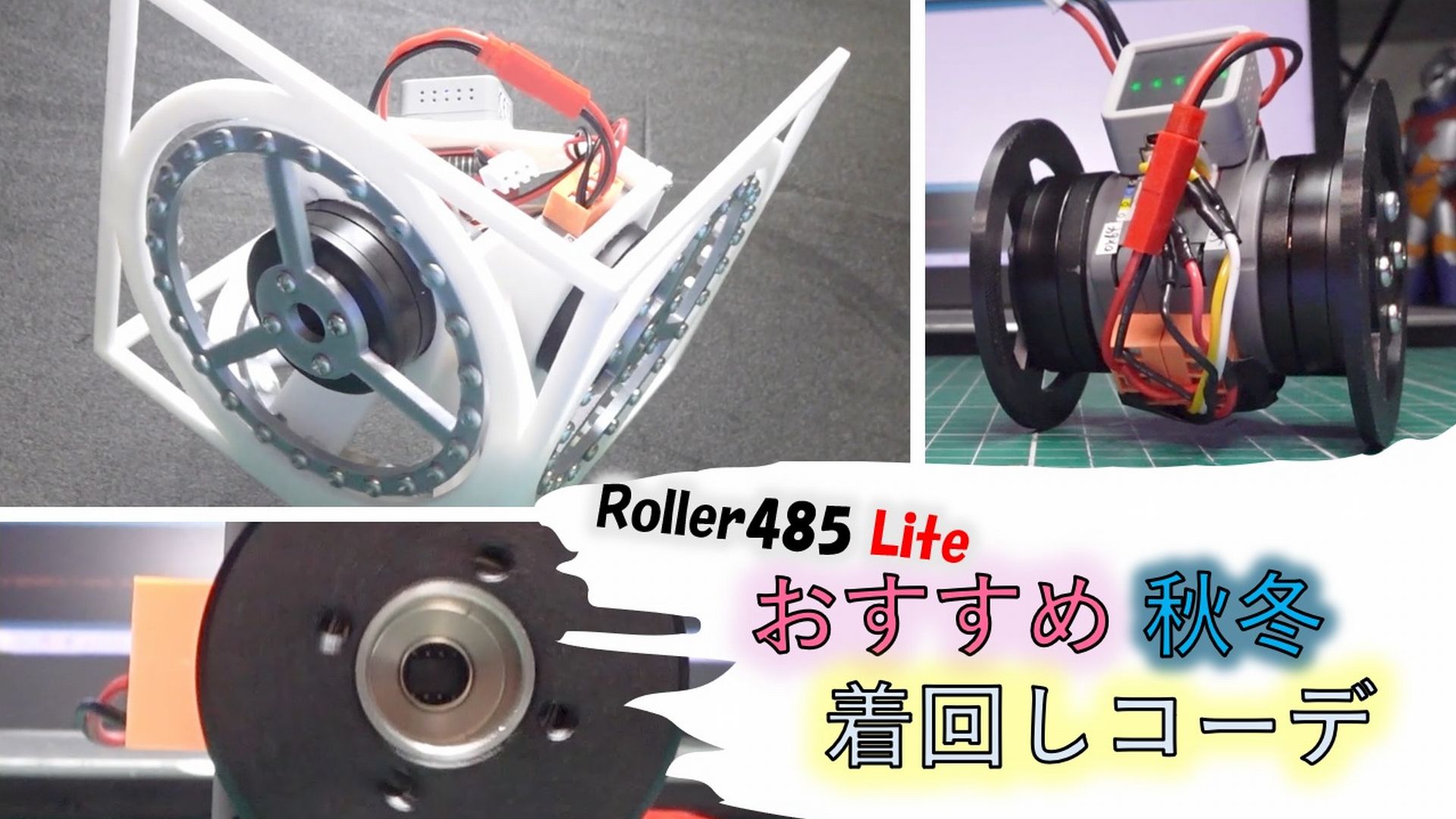
Roller485 Lite おすすめ秋冬着回しコーデ
M5Stack社よりマイコンSTM32内蔵のブラシレスモータユニットが発売されました。 [bc url="https://docs.m5stack.com/ja/unit/Unit-Roller485%20Lite"] 最近はSimpleFOCを活用したブラシ...
電子工作 2024.10.20 お父ちゃん ![]()

SimpleFOCによるベクトル制御への誘い
前回はSimpleFOCで複数モータのI2Cマルチプレクサでの同一I2Cバスによるエンコーダ回転監視動作を確認しました。 https://homemadegarbage.com/simplefoc09/ 倒立振子や3軸姿勢制御モジュールで動作確認したのですがいずれも電流センスなしのクローズドルー...
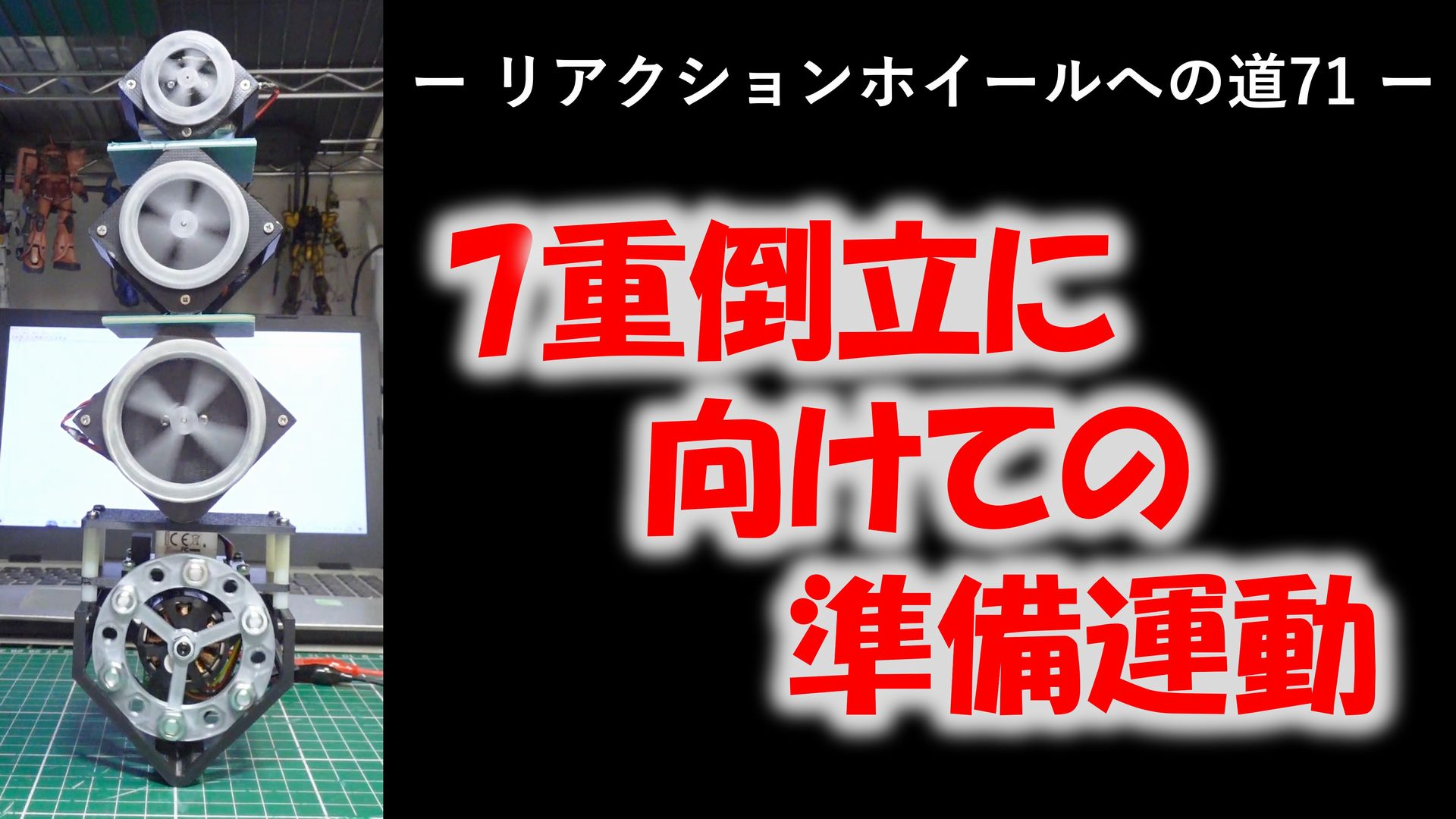
7重倒立に向けての準備運動 ーリアクションホイールへの道71ー
最近はもっぱらSimpleFOCでブラシレスモータを回すことにハマっております。 色々なブラシレスモータで1軸姿勢制御モジュールも製作しました。 https://homemadegarbage.com/simplefoc07 強力なドローンモータを用いて多重倒立も実現できました...
電子工作 2024.10.12 お父ちゃん ![]()
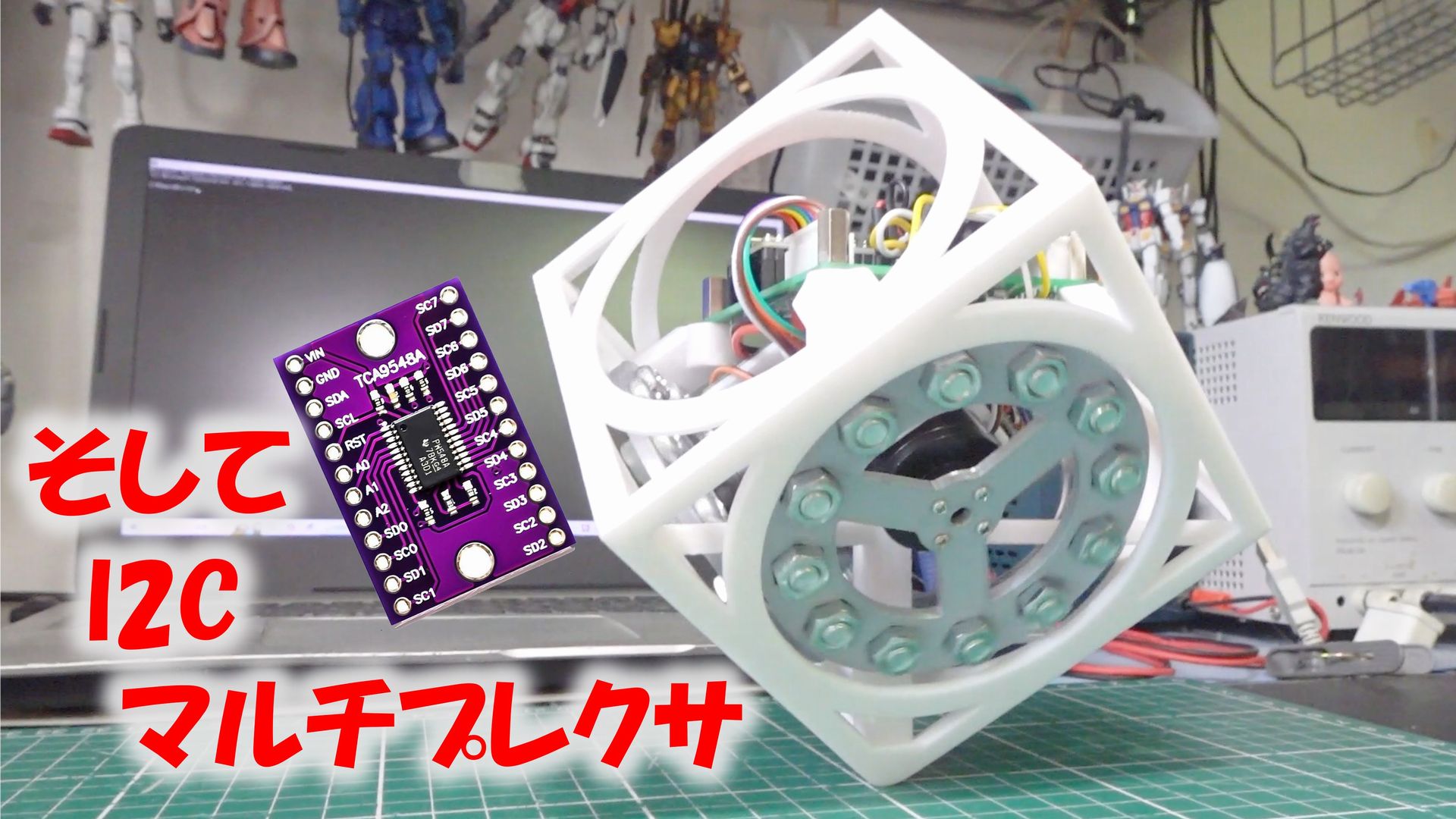
そして I2Cマルチプレクサ
これまでSimpleFOCによるブラシレスモータ制御で倒立振子やリアクションホイール姿勢制御モジュールなどの製作を楽しんできました。 モータを複数制御する際はエンコーダとしてA/B相出力のあるAS5601を使用してきました。 A/B相出力ではパルスカウンタで回転を検知するため異常回転時に絶対位置...

3重点倒立 ーリアクションホイールへの道70ー
先日 SimpleFOCでのブラシレスモータ制御による3軸姿勢制御モジュールを製作しました。 https://homemadegarbage.com/simplefoc08/ これにより手元に3機の3軸姿勢制御モジュールがそろいましたのでちょっと余計なことをしてみました。 &n...
電子工作 2024.10.7 お父ちゃん ![]()
SimpleFOC で3軸姿勢制御モジュール
前回までにSimpleFOCによるブラシレスモータの制御での1軸姿勢制御モジュールの製作・動作確認を実施しております。 https://homemadegarbage.com/simplefoc07 ここではコレを発展させてホイール3軸での点倒立姿勢制御モジュールの製作を実施しま...
電子工作 2024.10.4 お父ちゃん ![]()

SimpleFOC でリアクションホイール姿勢制御モジュール2
前回はSimpleFOCによるリアクションホイール姿勢制御モジュールの制御を楽しみました。 https://homemadegarbage.com/simplefoc06/ モータはジンバル用の小型ブラシレスモータを使用しました。 [amazonjs asin="B09JZ56...
電子工作 2024.9.30 お父ちゃん ![]()

SimpleFOC でリアクションホイール姿勢制御モジュール
前回はSimpleFOCライブラリを用いてブラシレスモータを制御し倒立振子を製作しました。 https://homemadegarbage.com/simplefoc05/ ここではリアクションホイールによる姿勢制御モジュールを製作したので報告いたします。 ...
電子工作 2024.9.25 お父ちゃん ![]()
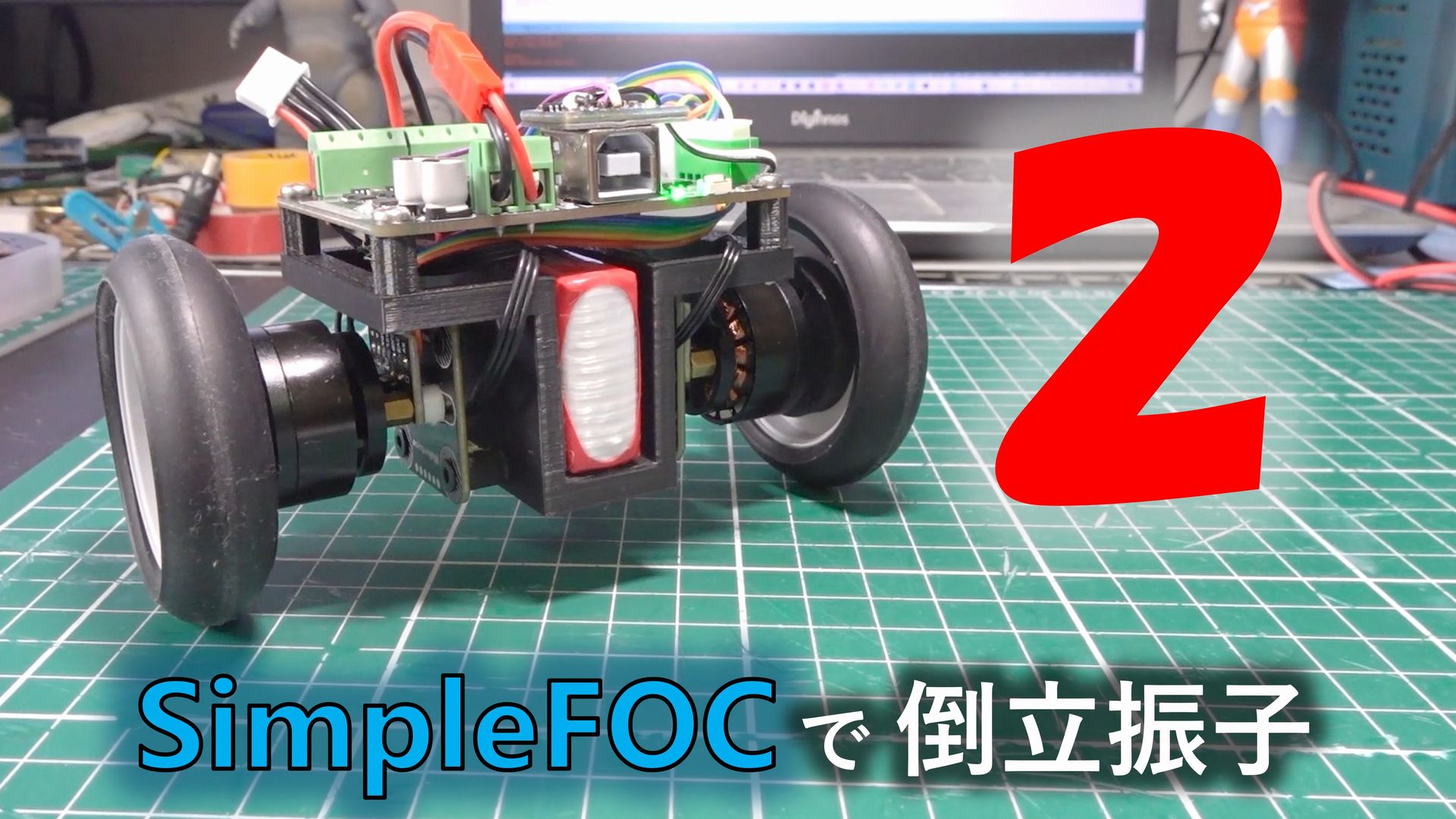
SimpleFOC で倒立振子2
前回はSimpleFOCによる倒立振子をESP32搭載のMakerbase社製のコントローラを後いて検証いたしました。 https://homemadegarbage.com/simplefoc04 Makerbase社製のコントローラ ここでは前回の問題点...