サーボモータ
2023年 SPRESENSE活用コンテスト への道⑧ ー平行犬ー
HomeMadeGarbage Advent Calendar 2023 |24日目 前回は 2023年 SPRESENSE活用コンテスト への応募に向けてBLE通信でサーボモータSTS3032ロボット犬の各種制御を楽しみました。 https://homemadegarbage.com/spre...
Advent Calendar / 電子工作 2023.12.24 お父ちゃん ![]()
2023年 SPRESENSE活用コンテスト への道⑦ ーBLE通信3ー
HomeMadeGarbage Advent Calendar 2023 |20日目 前回は 2023年 SPRESENSE活用コンテスト への応募に向けてサーボモータSTS3032でロボット犬を構成してSPRESENSEのマルチコア機能を使って動作を確認しました。 https://homema...
Advent Calendar / 電子工作 2023.12.20 お父ちゃん ![]()
2023年 SPRESENSE活用コンテスト への道⑥ ーマルチコア ロボット犬ー
HomeMadeGarbage Advent Calendar 2023 |16日目 前回は 2023年 SPRESENSE活用コンテスト への応募に向けてサーボモータSTS3032でロボット犬を構成して動作を確認しました。 https://homemadegarbage.com/spresen...
Advent Calendar / 電子工作 2023.12.16 お父ちゃん ![]()
2023年 SPRESENSE活用コンテスト への道⑤ ーロボット犬ー
HomeMadeGarbage Advent Calendar 2023 |14日目 前回は 2023年 SPRESENSE活用コンテスト への応募用に提供いただいたBLEボード BLE1507 を用いてサーボモータのBLE通信遠隔操作を実施しました。 https://homemadegarba...
Advent Calendar / 電子工作 2023.12.14 お父ちゃん ![]()

2023年 SPRESENSE活用コンテスト への道④ ーBLE通信2ー
HomeMadeGarbage Advent Calendar 2023 |12日目 前回は 2023年 SPRESENSE活用コンテスト への応募用に各種サンプル部品を提供いただき、BLEボード BLE1507 を用いてスマホとの通信を確認しました。 https://homemadegarba...
Advent Calendar / 電子工作 2023.12.12 お父ちゃん ![]()
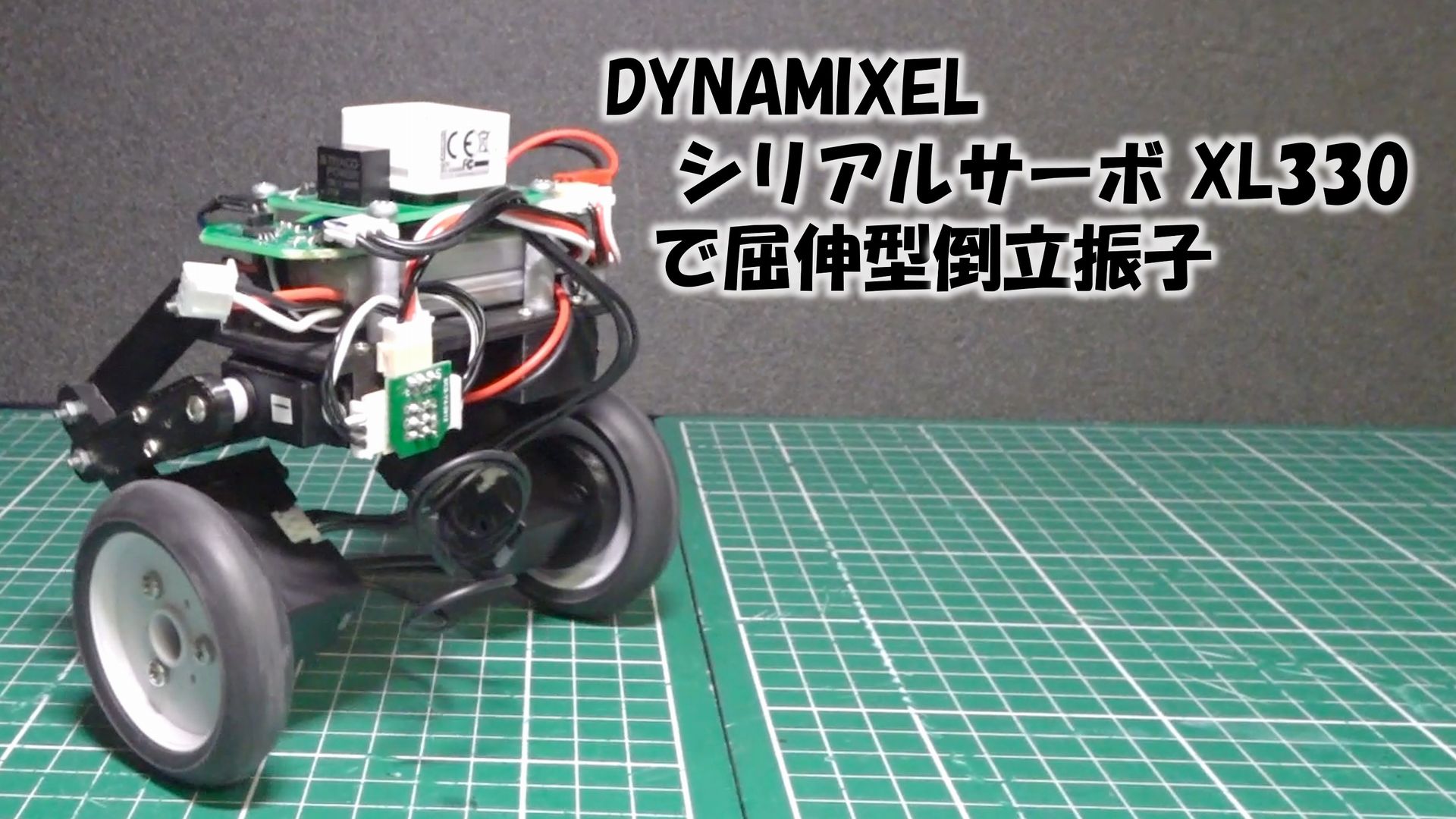
DYNAMIXEL シリアルサーボ XL330 で 屈伸型倒立振子
前回は DYNAMIXEL シリアルサーボモータ XL330-M077-T を用いて倒立振子を製作しました。 https://homemadegarbage.com/bala22 XL330-M077-T が非常に高速で応答性も良かったため、とても良い倒立振子が仕上がりました。 これに大変気を...
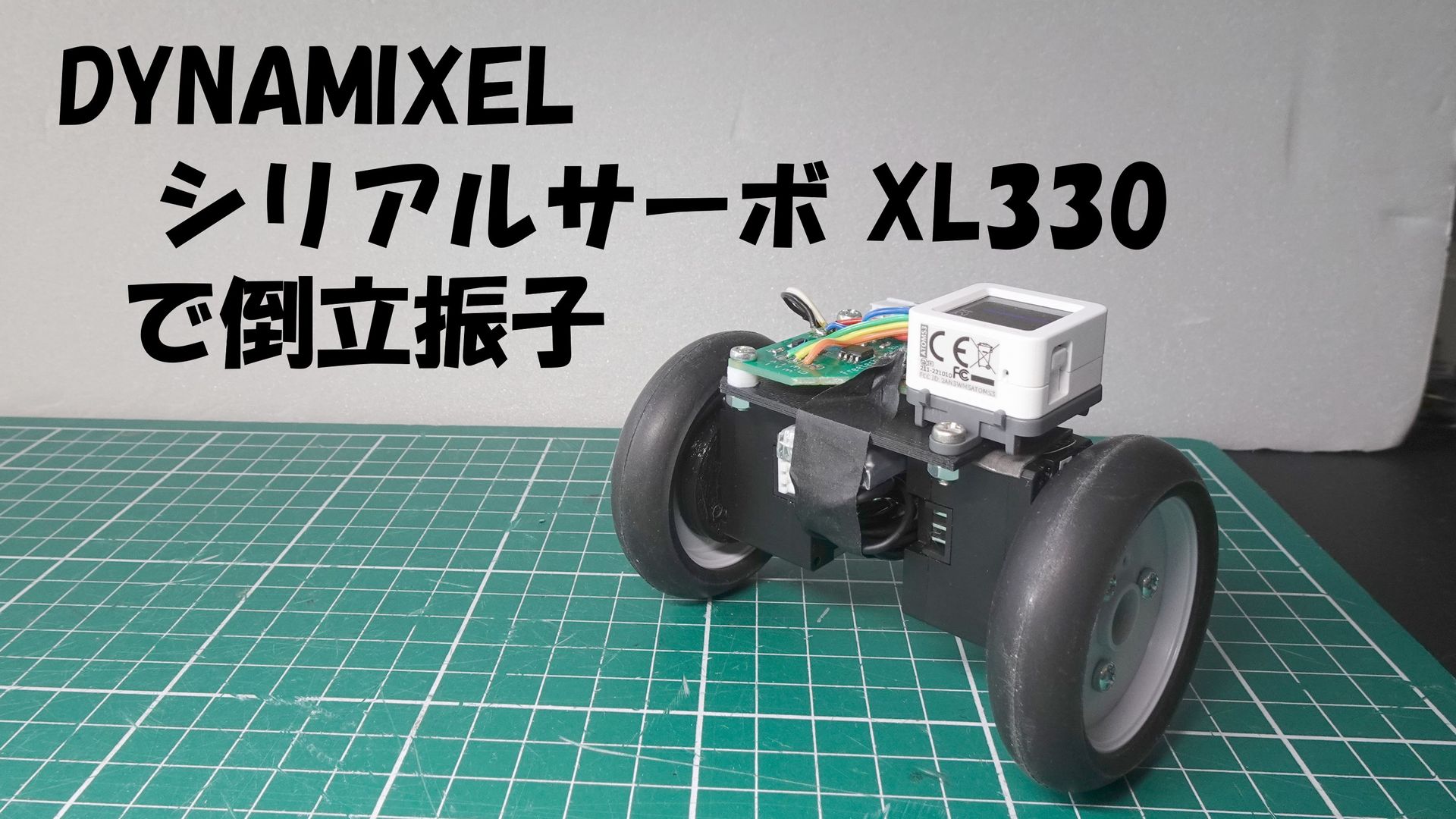
DYNAMIXEL シリアルサーボ XL330 で倒立振子
X (旧Twitter) で孔明さんよりもの凄い早いサーボモータが紹介されておりました。 https://twitter.com/eternalfriend17/status/1724053238213709954 DYNAMIXELシリーズ シリアルサーボモータ XL330-M077-T で回...

シリアルサーボ STS3032 の考察
これまでFeetech社製 シリアルサーボ STS3032を用いていろいろ製作してきました。 いろいろと私なりに分かったことをまとめます。 [bc url="https://akizukidenshi.com/catalog/g/gM-16311/"] STS30...
電子工作 2023.11.14 お父ちゃん ![]()

二足歩行ロボット SHISEIGYO-1 Walker 再考
先日、以前製作した二足歩行ロボット SHISEIGYO-1 Walker の動画をみてたら新鮮にいい動きだなと思いましたよ。 https://twitter.com/H0meMadeGarbage/status/1718142708714524859 https://homemadegarbag...
電子工作 2023.11.7 お父ちゃん ![]()

ロボット犬つくってバク転させてみた
前々からやってみたいと思っていたロボット犬のバク転を実現するべく頑張りましたので報告します。 これやってみたいよなー ミニぷぱでも試したことあるけど、サーボのトルクや足の構造上で無理でした。 https://twitter.com/H0meMadeGarbage/statu...
電子工作 2023.10.20 お父ちゃん ![]()
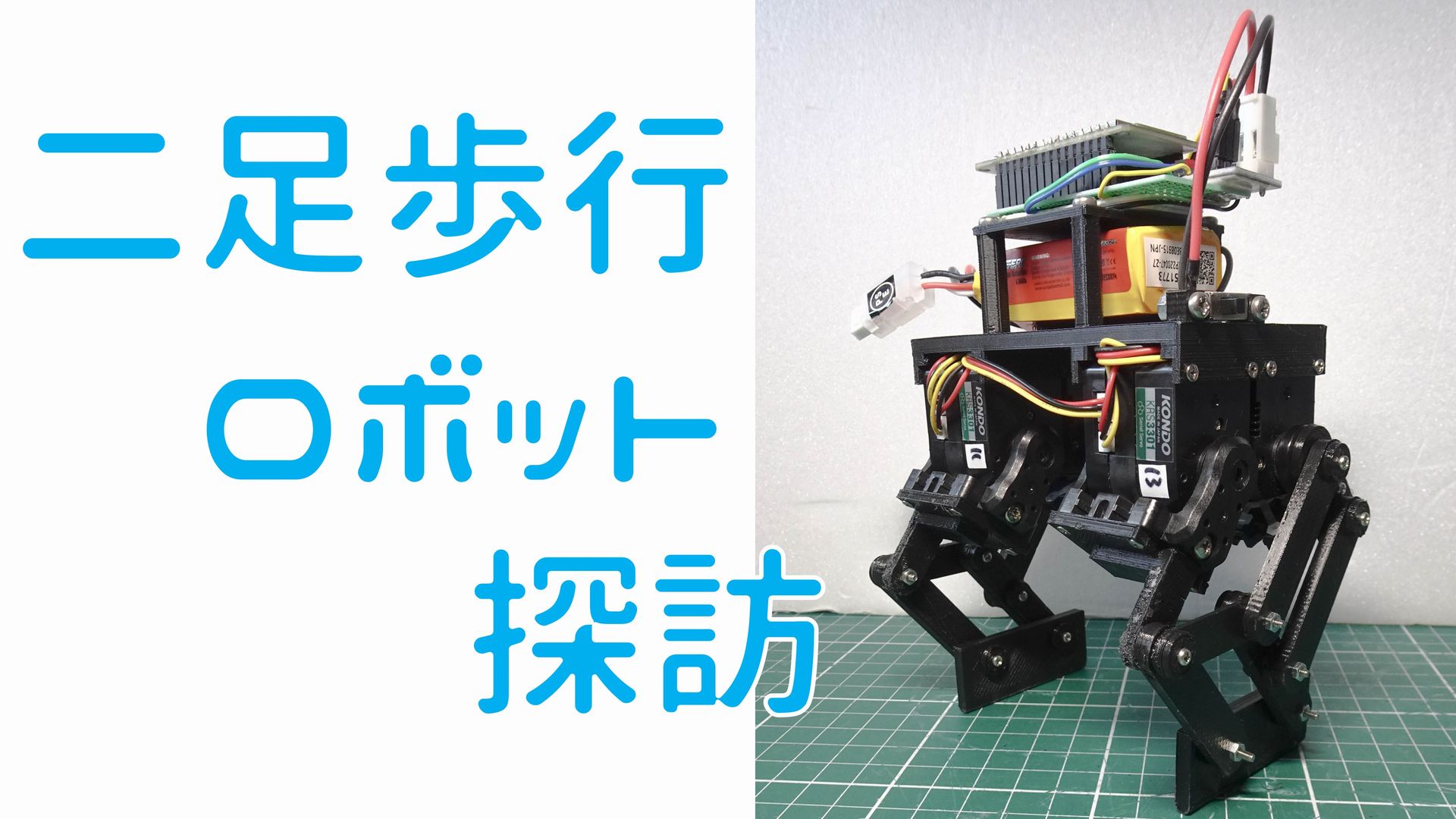
二足歩行ロボット 探訪
X (旧Twitter) にて面白いロボットを目にし、改めて二足歩行ロボットを調査・製作してみたくなりました。 https://twitter.com/H0meMadeGarbage/status/1708976352165298456 考察と方針 コチラのロボッ...
電子工作 2023.10.8 お父ちゃん ![]()
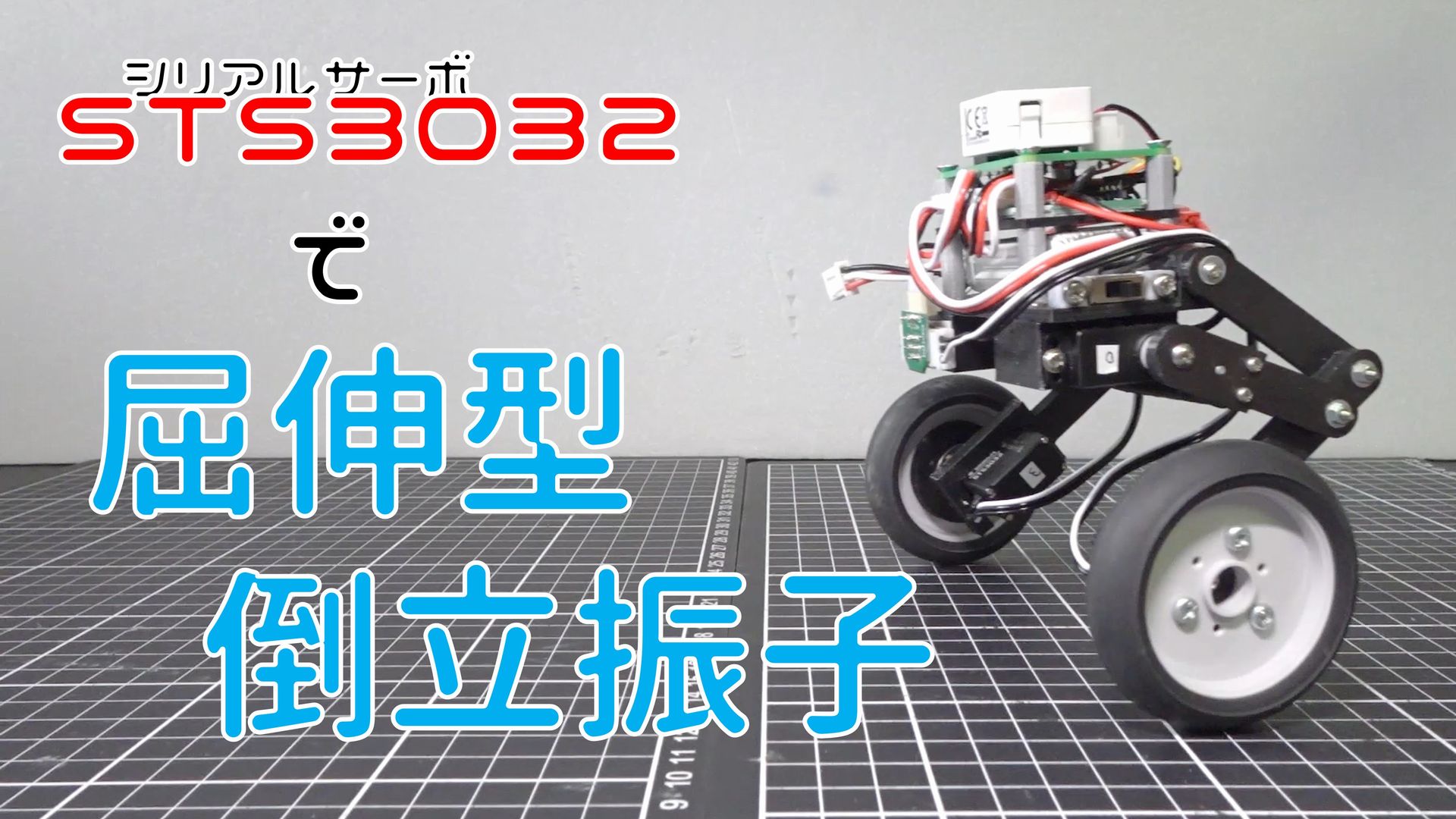
シリアルサーボ STS3032 で屈伸型倒立振子
前回はホイール駆動用にギアドモータを採用した屈伸型倒立振子を製作しました。 https://homemadegarbage.com/bala20/ ギアドモータの応答性に若干もたつきがあり縦横無尽に操作とはいきませんでした。 エンコーダなどを追加して回転速度をガッチリセンスすれ...
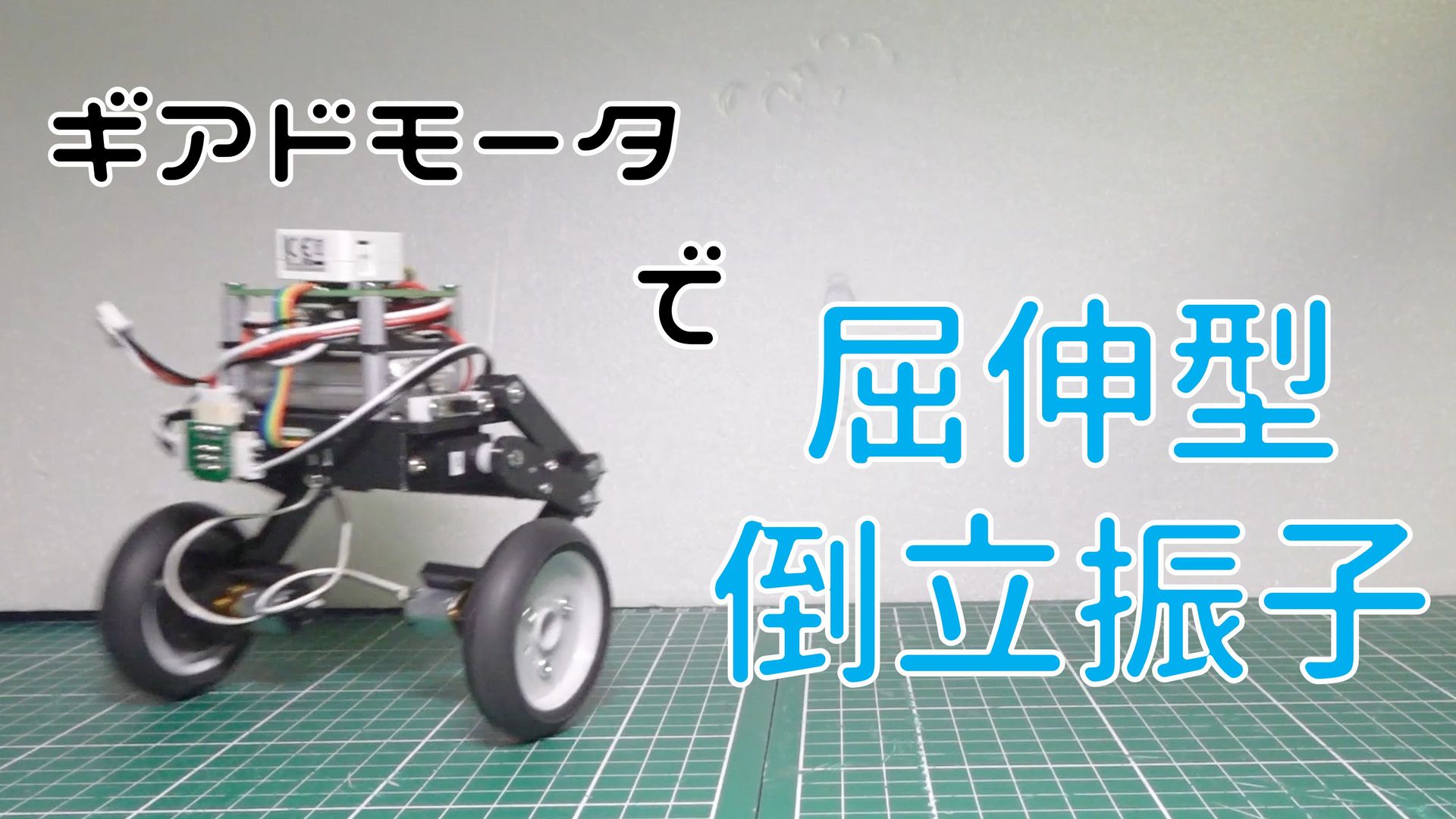
ギアドモータで屈伸型倒立振子
以前 ギアドモータを用いて倒立振子製作を楽しみました。 https://homemadegarbage.com/bala16// 小型で軽いのでギアドモータで屈伸型の倒立振子の製作も試してみました。 筐体製作 屈伸型の筐体を3Dプリントで製作しま...

Wheel-Legged Robot ホイレグくん
ここ最近は倒立振子製作に力を入れておりました。 https://homemadegarbage.com/bala18// https://twitter.com/H0meMadeGarbage/status/1693568479520260488 こちらの屈伸型倒立振子を製作した際に、いつか4...
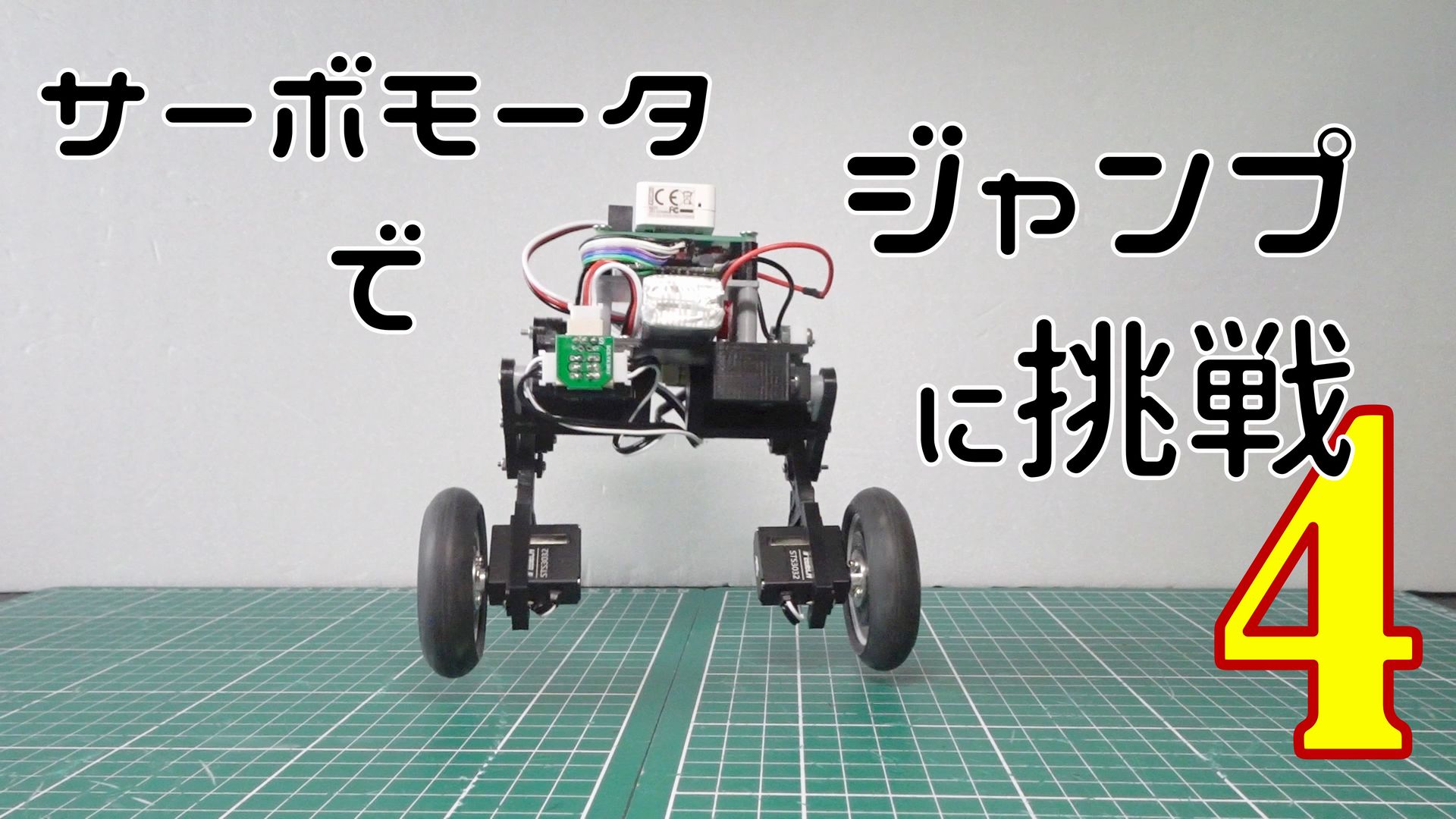
サーボモータでジャンプに挑戦4
前回はシリアルサーボ STS3032を用いての屈伸倒立振子を製作し、ジャンプ動作の確認を行いました。 https://homemadegarbage.com/bala17// しかし残念ながらジャンプ後の着地は実現できませんでした。 ホイール用モータ 倒立振子の...