サーボモータ
Wheeled Quadruped Robot を作りたい2
HomeMadeGarbage Advent Calendar 2024 |5日目 前回は4輪4脚ロボット Wheeled Quadruped Robot の実機製作を行い、基本動作である歩行や走行動作を確認しました。 https://homemadegarbage.com/wheel-leg...
Advent Calendar / 電子工作 2024.12.5 お父ちゃん ![]()
Wheeled Quadruped Robot を作りたい1
HomeMadeGarbage Advent Calendar 2024 |4日目 足先がタイヤのロボットの製作をたびたび実施しております。 https://homemadegarbage.com/wheel-leg03/ 最近は2輪ではありますがRoller485 を使用し...
Advent Calendar / 電子工作 2024.12.4 お父ちゃん ![]()

PS4コントローラ で ロボティクス
前々からやってみたいと思っていたゲームコントローラによるロボット制御に挑戦してみました。 PS4コントローラとESP32連動 以下の記事を参考にPS4コントローラとESP32の連動を試しました。 [bc url="https://gijin77.blog.jp/archives/...
電子工作 2024.7.18 お父ちゃん ![]()
二足歩行ロボット 歩行再考
以前製作した二足歩行ロボットをあらためておいじりしたいと思いたちました。 https://homemadegarbage.com/robottrip01 前回は以下のようにロボットの歩行の検証を実施しました。 更に歩行について研究しましたので報告いたします。...
電子工作 2024.5.9 お父ちゃん ![]()
Wheel-Legged Robot はロボットの王様です
今回は Wheel-Legged Robot について考えました。 Wheel-Legged Robotは過去に何度か製作しております。 https://homemadegarbage.com/wheel-leg/ https://homemadegarbage.com/spresense23...
電子工作 2024.3.22 お父ちゃん ![]()

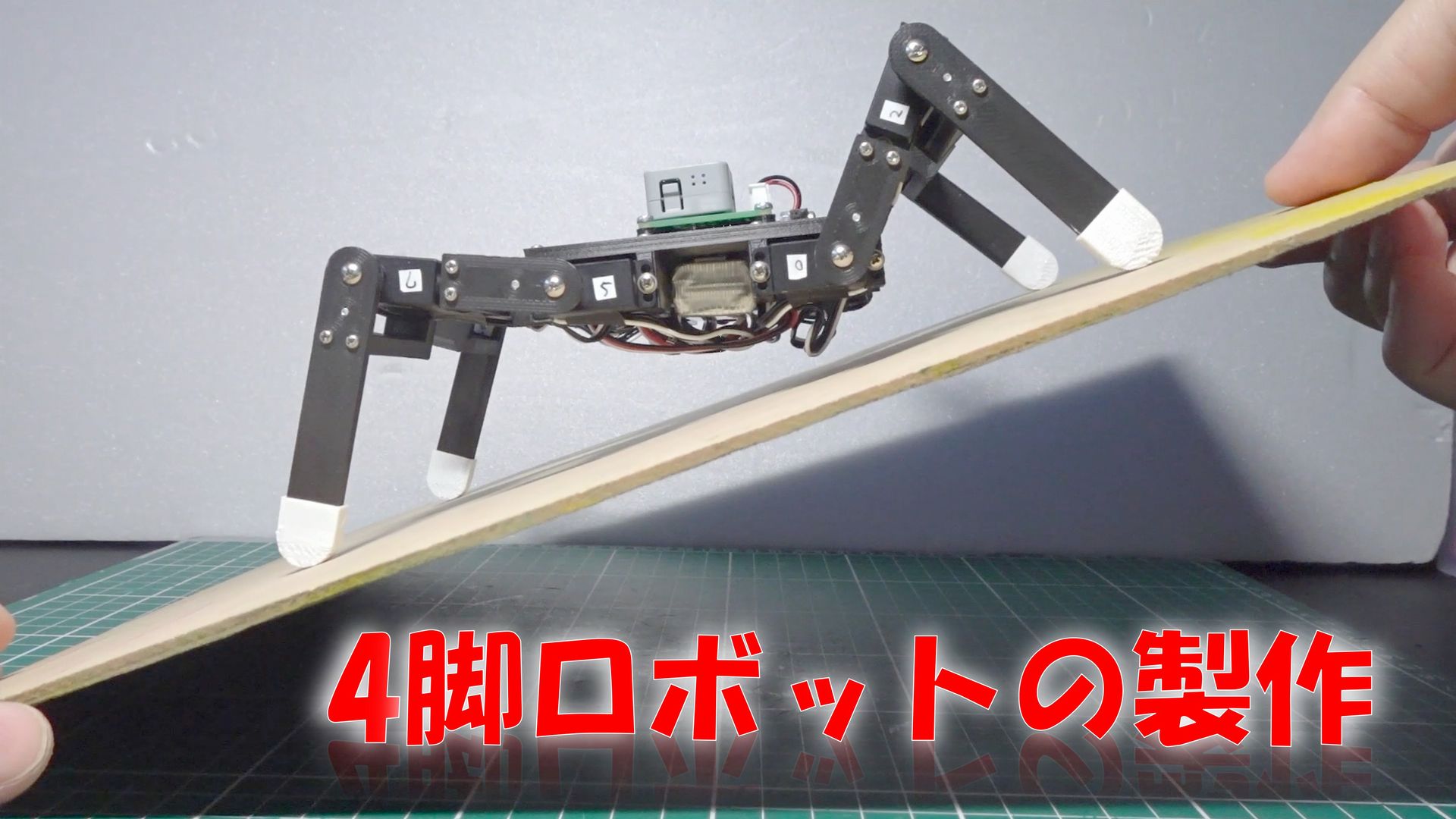
4脚ロボット SCS0009で更にしがむ
前回はシリアルサーボSCS0009による4脚ロボットでバク転動作を検討し実現に至りました。 https://homemadegarbage.com/robotdog04// ここでは更にこの4脚ロボットをしがむ格好で検証を進めました。 基板製作 Feetechの...
電子工作 2024.3.20 お父ちゃん ![]()
4脚ロボット SCS0009でバク転
前回は各種サーボモータで4脚ロボットの動作比較を実施いたしました。 https://homemadegarbage.com/robotdog03/ ここではシリアルサーボSCS0009でのバク転動作を更に掘り下げましたので報告いたします。 前回の比...
電子工作 2024.3.9 お父ちゃん ![]()

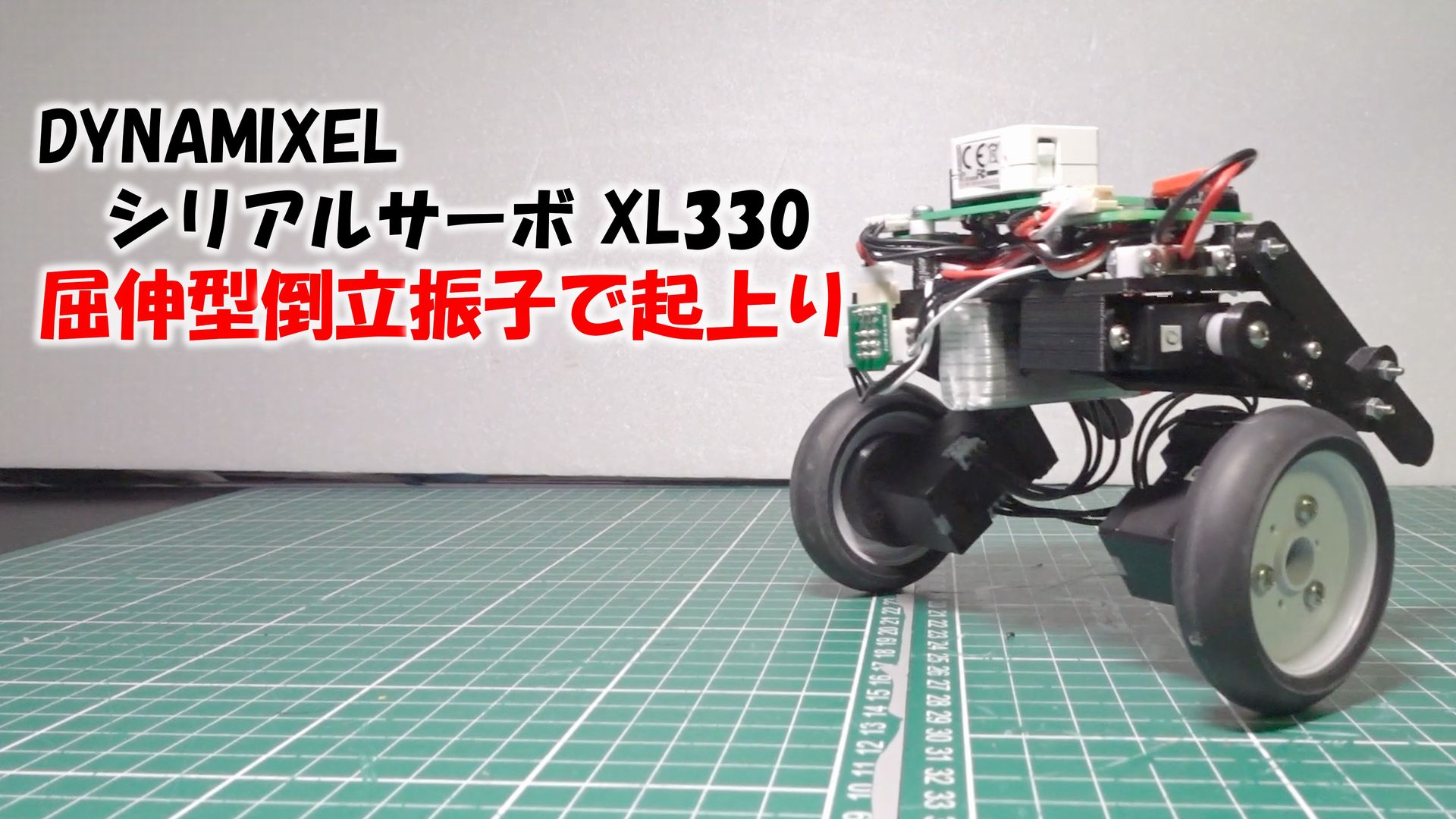
DYNAMIXEL シリアルサーボ XL330 屈伸型倒立振子で起上り
前回は DYNAMIXEL シリアルサーボモータ XL330-M077-T を用いて屈伸型倒立振子を製作しました。 https://homemadegarbage.com/bala23/ ホイール駆動用にXL330を採用し、足駆動用にFeetechのシリアルサーボ STS3032を用いています。...
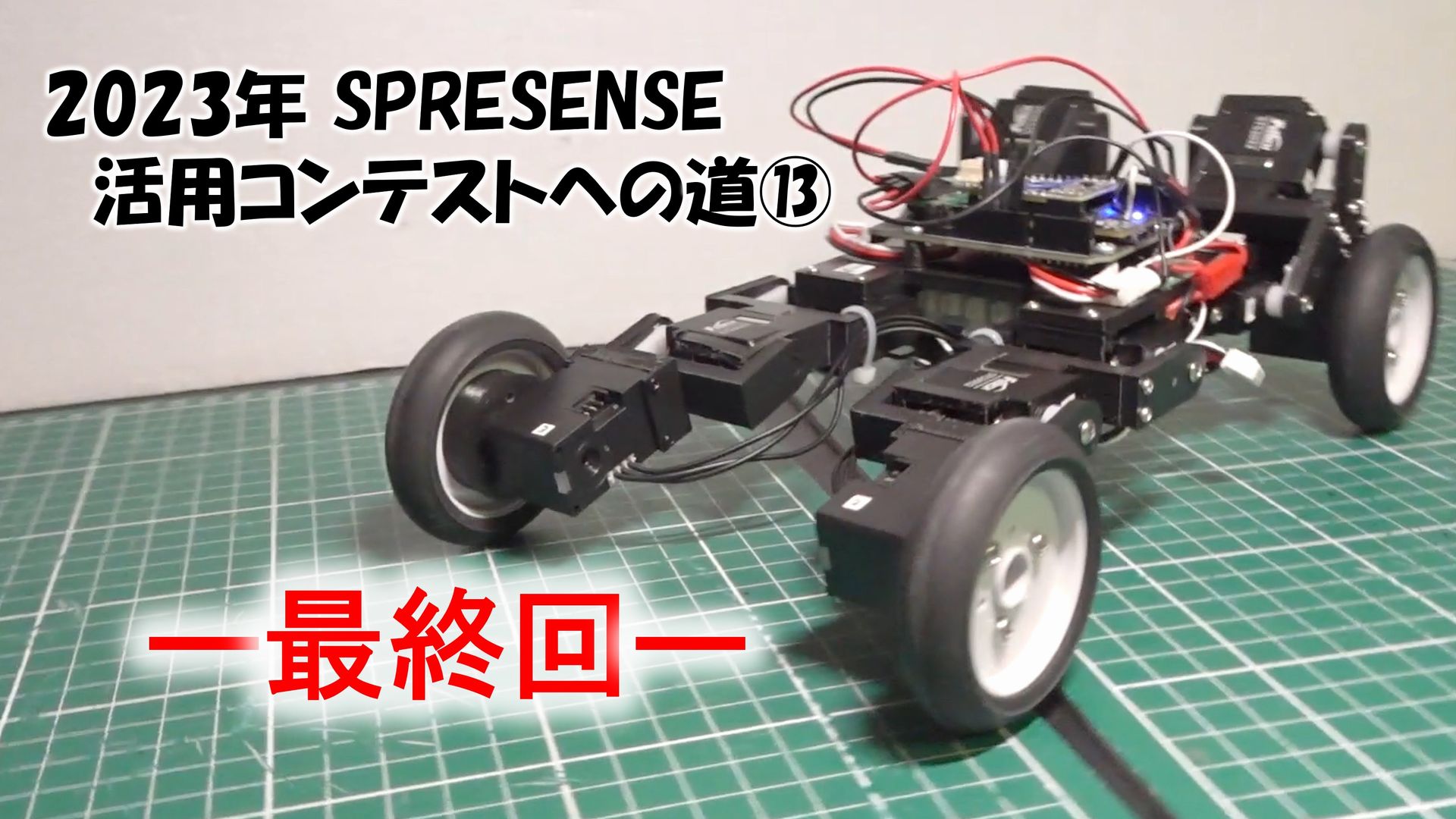
2023年 SPRESENSE活用コンテスト への道⑬ ー最終回ー
前回はSPRESENSEによる四極ロボットを楽しみました。 https://homemadegarbage.com/spresense23-12// ビークル 前回の四脚ロボットの足先をシリアルサーボ XL330によるホイールにします。 足を動かすサーボ STS...
電子工作 2024.1.12 お父ちゃん ![]()
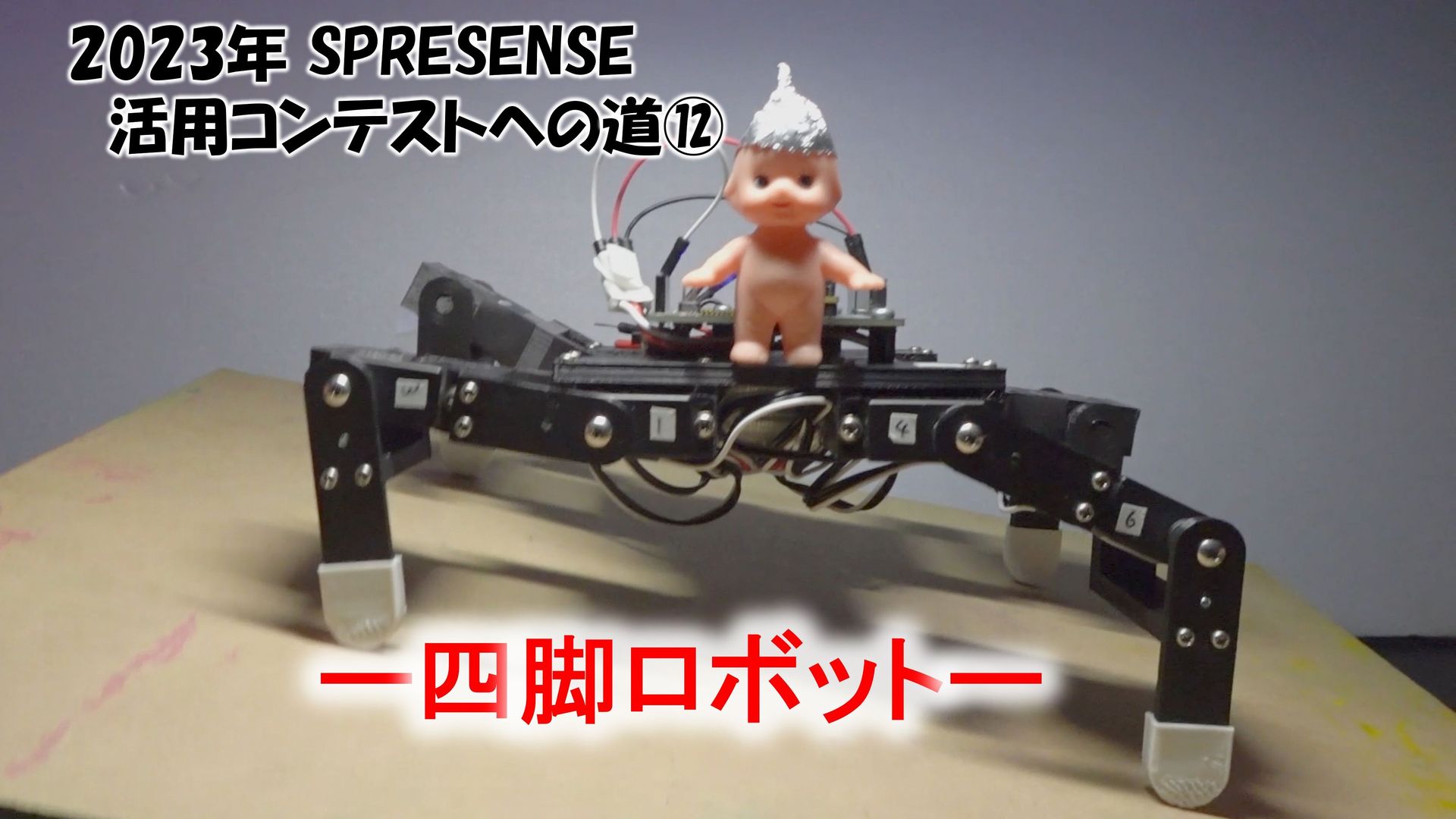
2023年 SPRESENSE活用コンテスト への道⑫ ー四脚ロボットー
前回はSPRESENSEによる屈伸型倒立振子を製作し動作確認しました。 https://homemadegarbage.com/spresense23-11/ いよいよ 2023年 SPRESENSE活用コンテスト への応募に向けて、ロボット製作を進めます。 こ...
電子工作 2024.1.10 お父ちゃん ![]()

2023年 SPRESENSE活用コンテスト への道⑪ ー屈伸型倒立振子ー
前回はSPRESENSEによる倒立振子を製作し動作確認しました。 https://homemadegarbage.com/spresense23-10// 屈伸型倒立振子製作 前回製作した倒立振子に更にシリアルサーボ STS3032を追加して屈伸型倒立振子を製作しま...
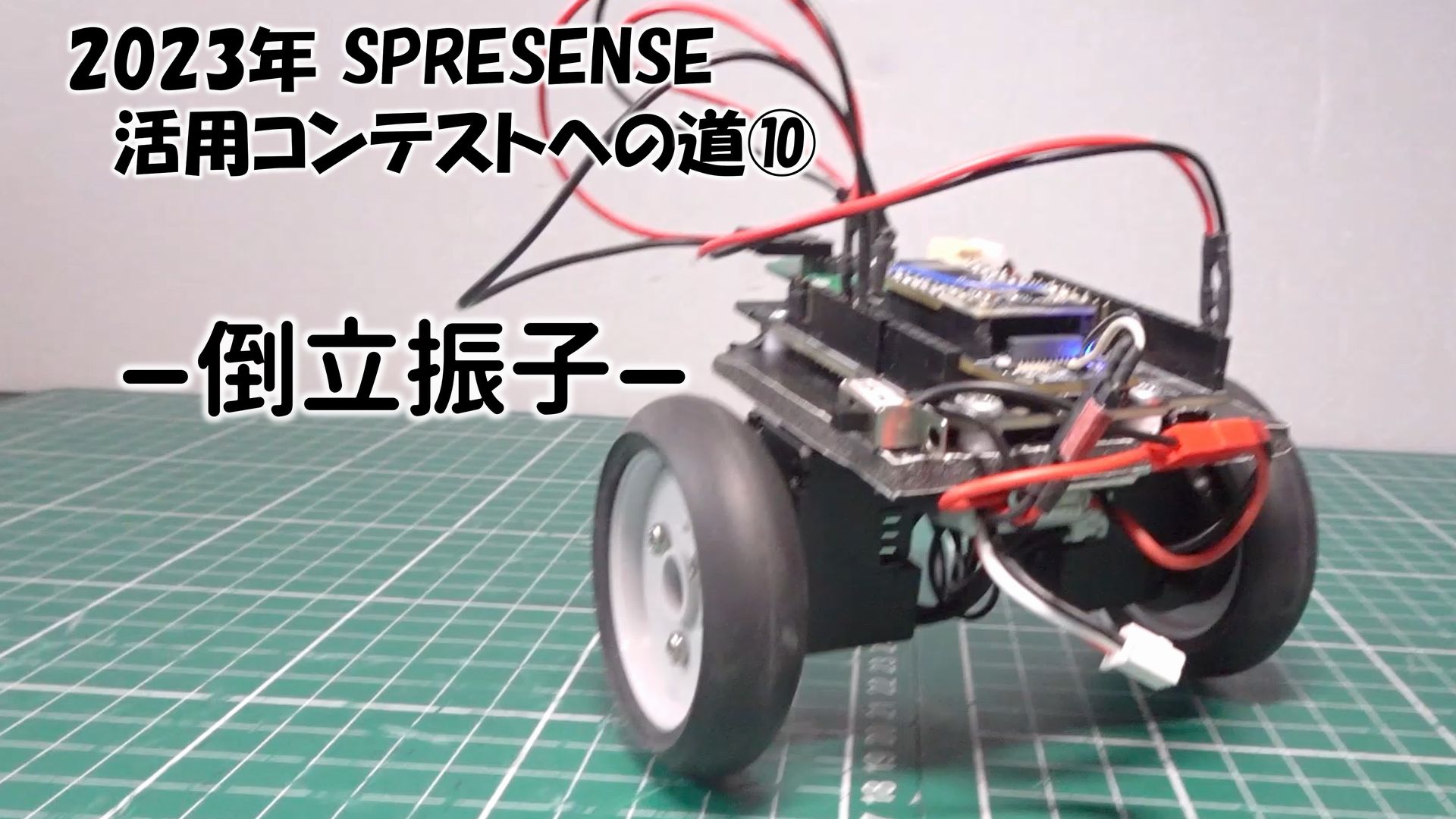
2023年 SPRESENSE活用コンテスト への道⑩ ー倒立振子ー
前回はBLEボード BLE1507 をソフトウェアシリアル通信対応させてシリアルサーボ XL330とのSPRESENSEによる併用を確認しました。 https://homemadegarbage.com/spresense23-9/ 倒立振子製作 BLEボードとサ...

2023年 SPRESENSE活用コンテスト への道⑨ ーBLE通信4ー
前回は9軸Addon ボードのIMUセンサ BMI270 を用いてSPRESENSE傾斜計を実現しロボット犬の姿勢制御を楽しみました。 https://homemadegarbage.com/spresense23-8/ BLEボードとXL330の併用 本道シリー...
電子工作 2023.12.28 お父ちゃん ![]()