
モータ
リアクションホイール倒立振子 SHISEIGYO-3 N1 使用法
3軸リアクションホイール倒立振子 SHISEIGYO-3 N1 の使用法を紹介させていただきます。 SHISEIGYO-3 N1 実機を以下で販売中です。是非ご検討ください。 https://shop.homemadegarbage.com/product/s-3-n1/ ...
電子工作 2026.5.18 お父ちゃん ![]()

リアクションホイール姿勢制御モジュール SHISEIGYO-3 N1 完成
前回は ID-529XW を3個使用したリアクションホイール姿勢制御モジュールを製作しました。 https://homemadegarbage.com/reactionwheel82 物理ブレーキなしでの自立動作を目指しましたが、不可能であることが分かりましたので、ここではブレー...
電子工作 2026.4.29 お父ちゃん ![]()

リアクションホイール姿勢制御モジュール SHISEIGYO-3 N1 (仮)
前回、前々回に引き続き AliExpressで在庫復活したブラシレスモータを鼻息荒くイジります。 ID-529XW (Short Model) :https://ja.aliexpress.com/item/1005011691218733.htm ID-529XWを1個使用...
電子工作 2026.4.9 お父ちゃん ![]()

ブラシレスモータでつくる 倒立振子
前回に引き続き AliExpressで在庫復活したブラシレスモータを喜びてイジります。 ID-529XW (Short Model) :https://ja.aliexpress.com/item/1005011691218733.htm https://homemadegarbage.com/...
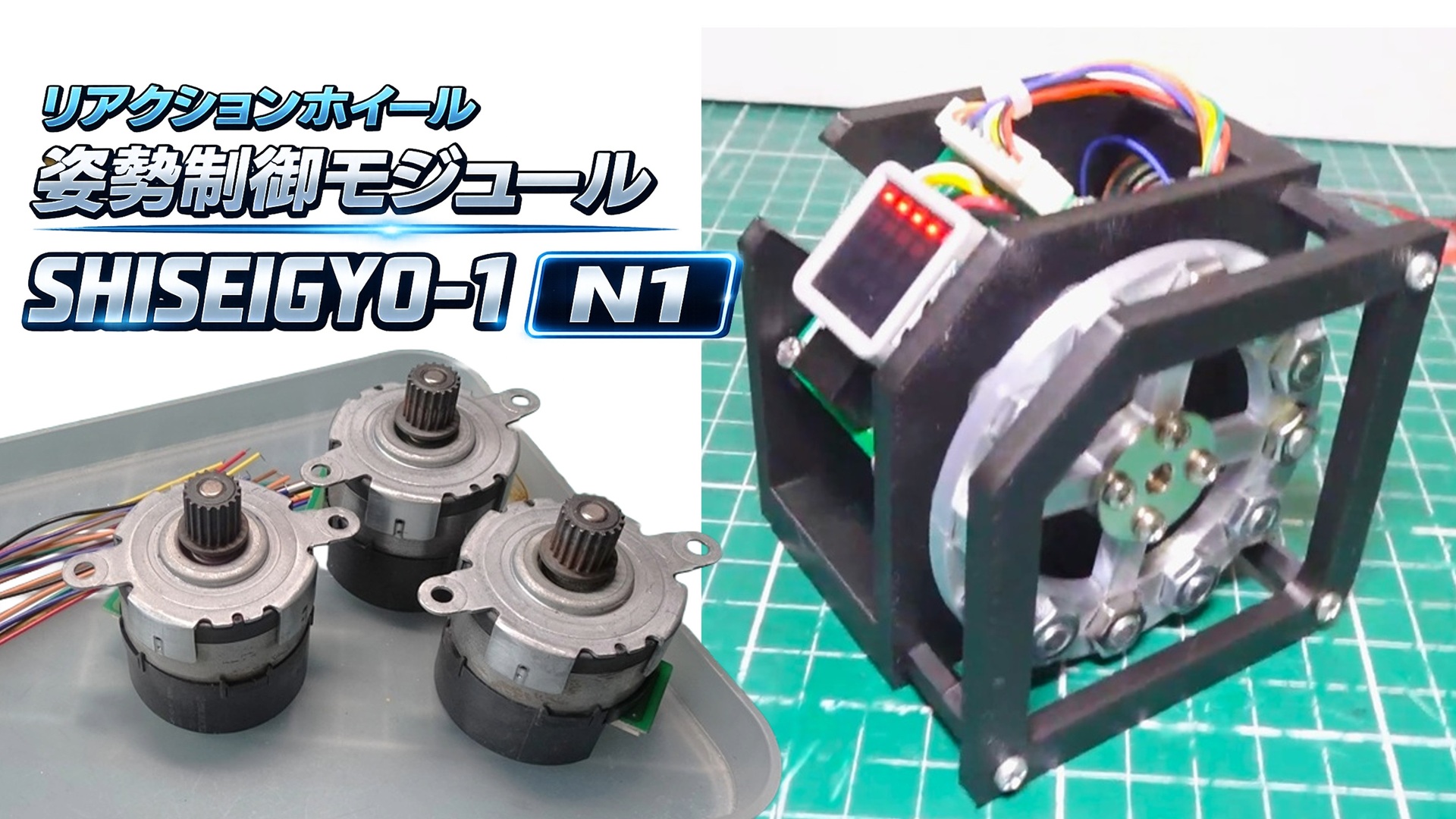
リアクションホイール姿勢制御モジュール SHISEIGYO-1 N1
しばらく在庫が切れていたブラシレスモータがAliExpressで復活していたので購入してみました。 ID-529XW (Short Model) :https://ja.aliexpress.com/item/1005011691218733.html このブラシレスモータであらためて1軸リ...
電子工作 2026.4.4 お父ちゃん ![]()

ROBSTRIDE 05 倒立振子を強化学習で楽しむ3
前回はQDDモータ Robstride 05を用いた1輪倒立振子の倒立走行動作の強化学習を実施しました。 https://homemadegarbage.com/robstride-rl02 ゲームパッドのジョイスティック入力(走行速度)も観測ベクトルに組み込んで学習して実機でも見事に動作確認で...

ROBSTRIDE 05 倒立振子を強化学習で楽しむ2
前回は強化学習による Robstride 05 倒立振子の安定倒立動作を実現しました。 https://homemadegarbage.com/robstride-rl01 ここでは倒立振子の走行動作を強化学習で実現したいと思います。 走行は以下のようにゲームパッドのジョイスティックで速...

ROBSTRIDE 05 倒立振子を強化学習で楽しむ1
以前に制作したQDD Robstride 05 を用いた倒立振子を強化学習で楽しみたいと思います。 Robstride 05 倒立振子 pic.twitter.com/AhgOQN9DT1 — HomeMadeGarbage (@H0meMadeGarbage) February 23,...

クローラー倒立ボット MorphCrawlerBot
去年 (2025年) 完成させたクローラー倒立ボット MorphCrawlerBot を先日改修して 去年の連載記事に追記という形で記載したのですが、埋もれてもったいないので改めて粒だてたいと思います。 https://homemadegarbage.com/bldcservo10// &nb...
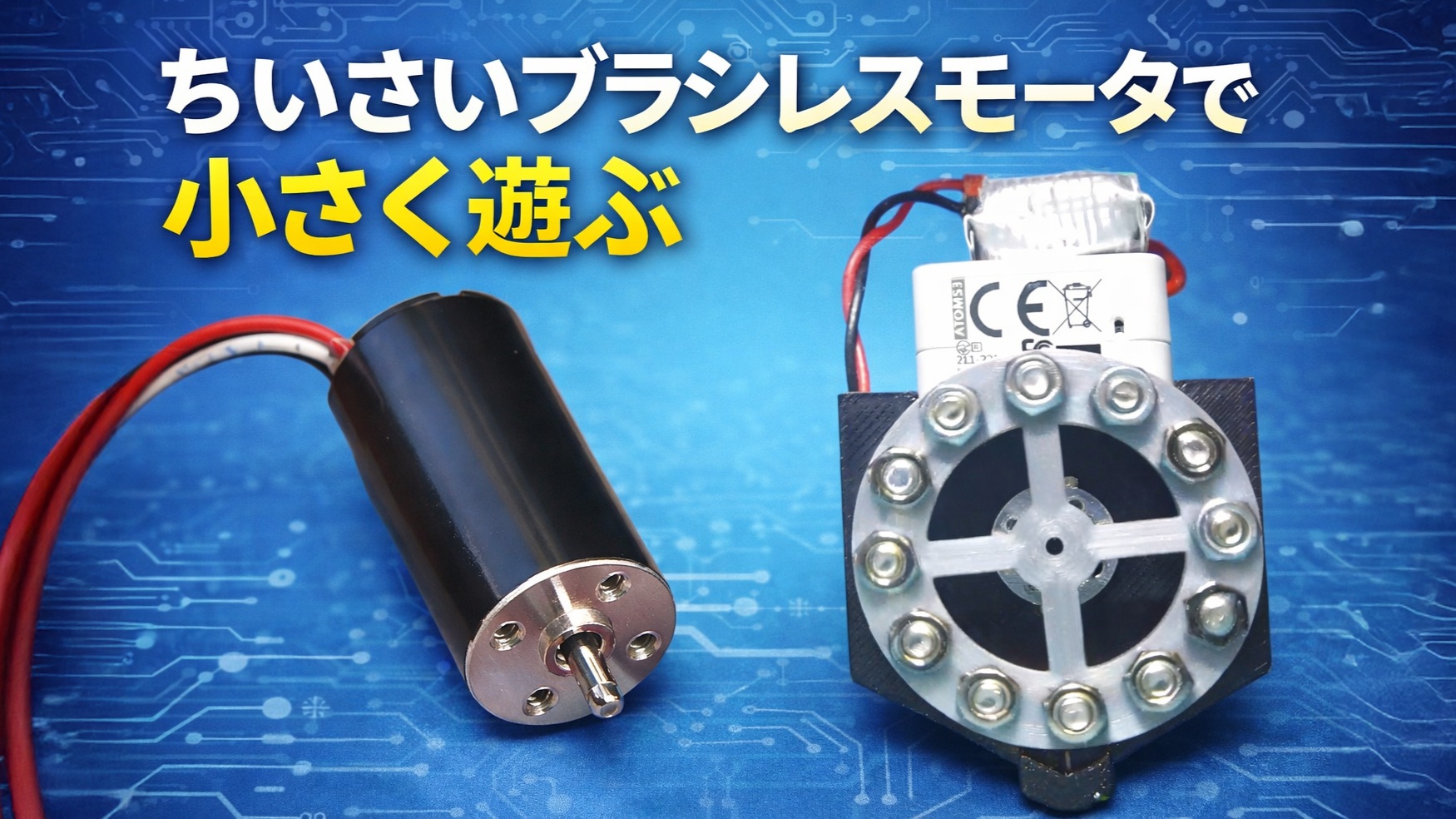
ちいさいブラシレスモータで小さく遊ぶ
今年 (2026年) にはいってから小さいブラシレスモータがAliExpressに出回っているように見受けられる (なんでだろね?ドローンブーム終了とか?)。 個人的にはうれしい。またいいモータに出会って来年 (2027年) の9重倒立実現確度を高めたいのだ。 ↑早速試しに1個 買ってみた...
電子工作 2026.2.8 お父ちゃん ![]()
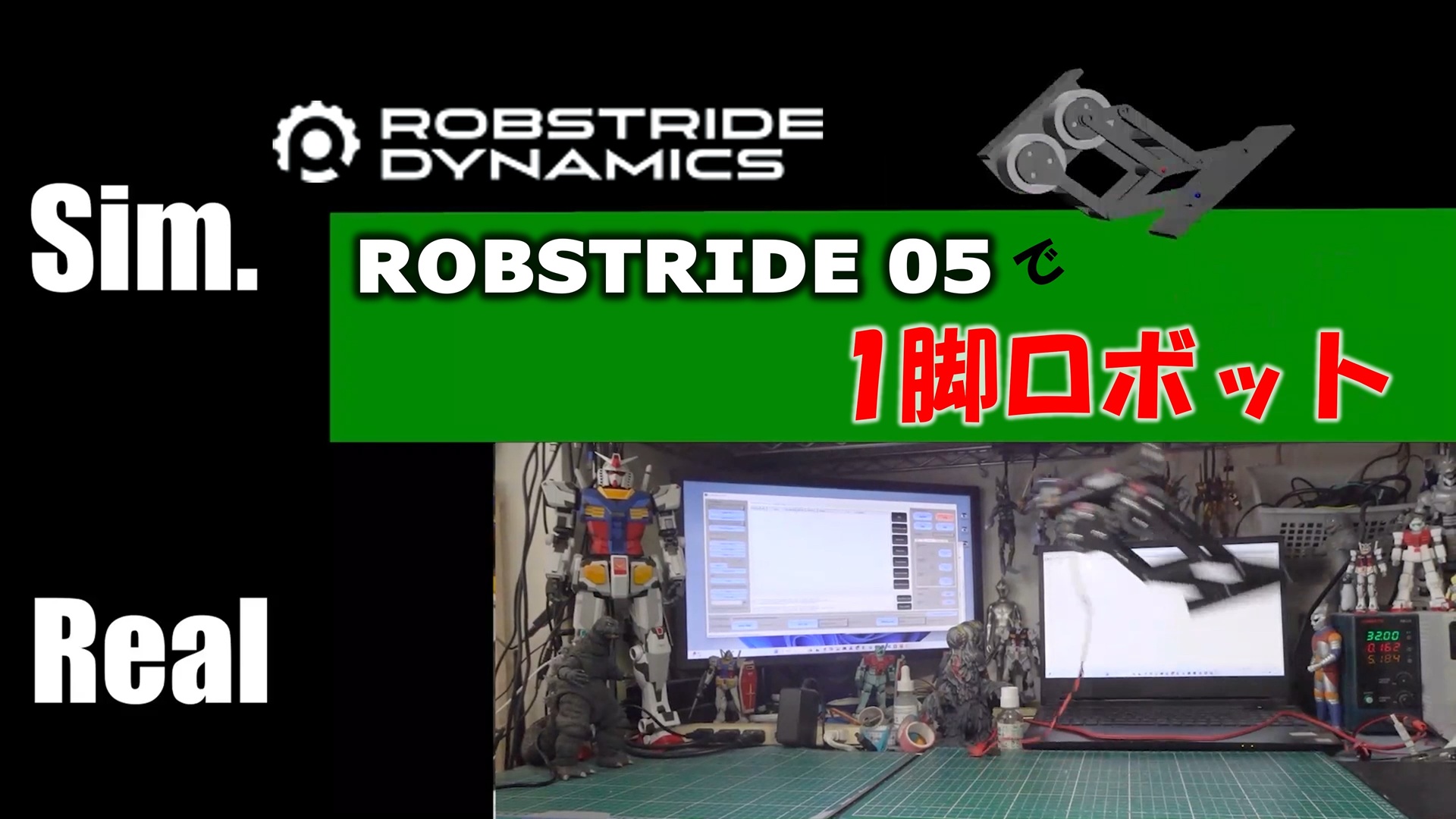
ROBSTRIDE 05 で1脚ロボット
以前 2個のRobStride 05 で1脚ロボを製作しました。 https://homemadegarbage.com/robstride04 ここではこの1脚ロボの動作を掘り下げてみました。 https://t.co/1KsNoXiFGT pic.twitter.com...
電子工作 2026.1.26 お父ちゃん ![]()

ついに達成!!! 8重倒立への道4
前回はSHISEIGYO-1の筐体を新造して、7重倒立の検討を実施しました。 https://homemadegarbage.com/reactionwheel78// ここでは安定的7重倒立を実現させて、ついに8重倒立に挑戦します。 8台のモジュール 今...
電子工作 2026.1.18 お父ちゃん ![]()


