
リアクションホイール
6重倒立に向けて① ーリアクションホイールへの道64ー
昨年末より6重倒立の達成を目指して、極小のモジュールを製作したり 第6の新規モジュールを製作いたしました。 https://homemadegarbage.com/reactionwheel62// https://homemadegarbage.com/reactionwh...
電子工作 2024.1.31 お父ちゃん ![]()
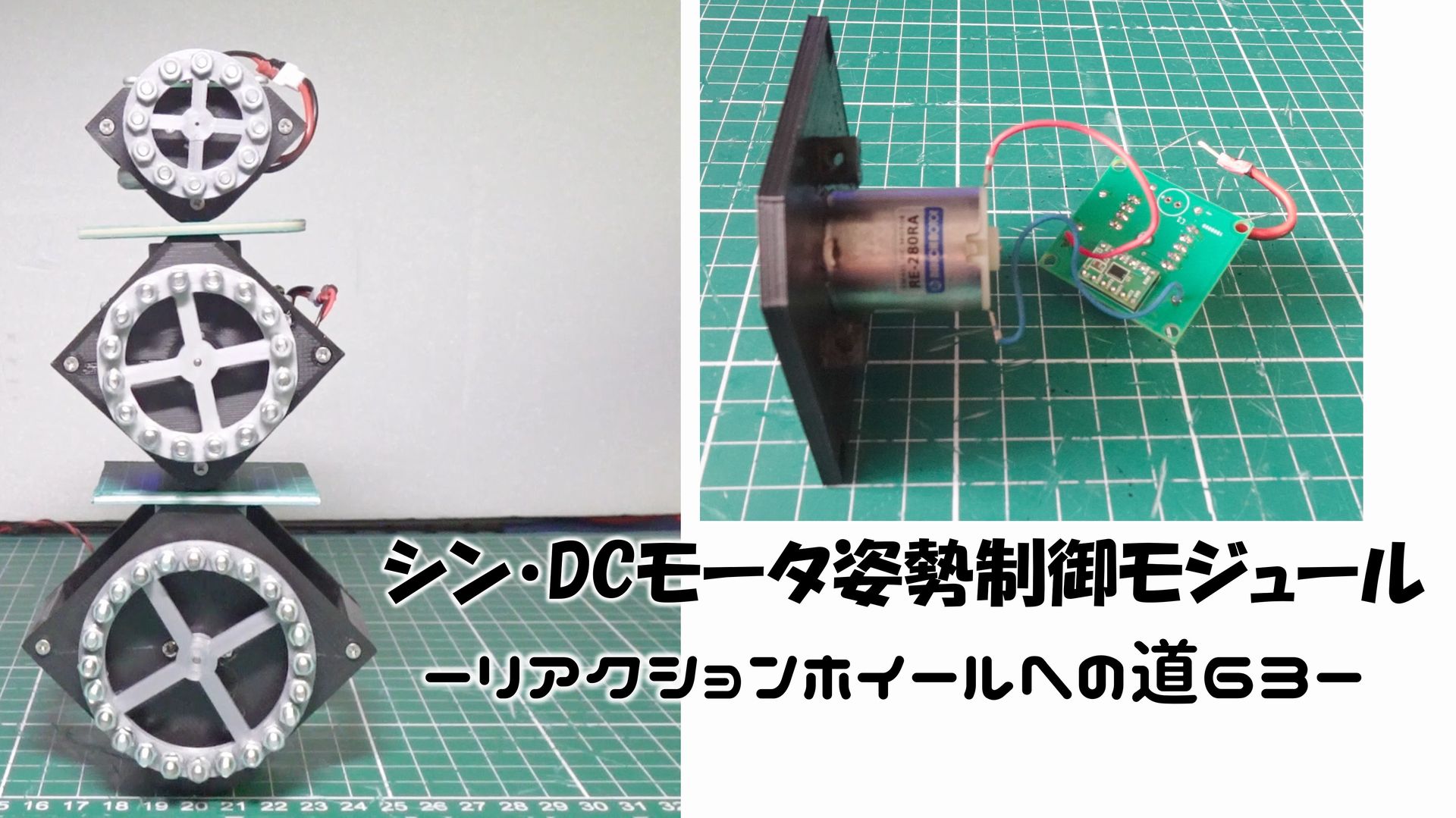
シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
HomeMadeGarbage Advent Calendar 2023 |22日目 前回から6重倒立に向けて準備を開始しております。 念願の5重倒立達成 ☟詳細はコチラhttps://t.co/uoq9a3fGf2 pic.twitter.com/3I6DR8jhjV — Ho...
Advent Calendar / 電子工作 2023.12.22 お父ちゃん ![]()
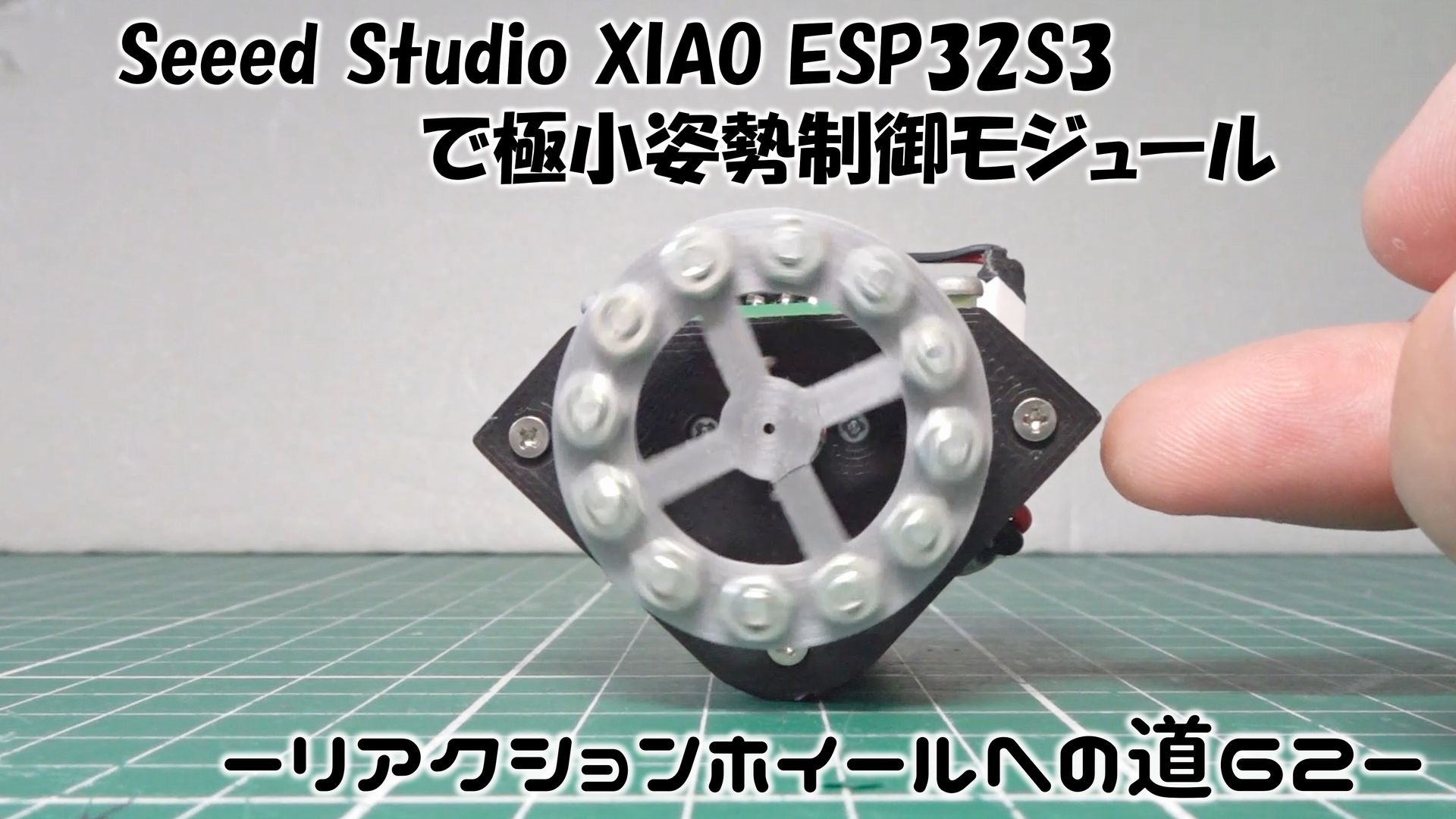
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
HomeMadeGarbage Advent Calendar 2023 |18日目 そろそろ多重倒立がしたくなってきました。たまに来るこの感情 現状の記録は5重。 https://twitter.com/H0meMadeGarbage/status/1640186881903042561 ...
Advent Calendar / 電子工作 2023.12.18 お父ちゃん ![]()

二足歩行ロボット SHISEIGYO-1 Walker 再考
先日、以前製作した二足歩行ロボット SHISEIGYO-1 Walker の動画をみてたら新鮮にいい動きだなと思いましたよ。 https://twitter.com/H0meMadeGarbage/status/1718142708714524859 https://homemadegarbag...
電子工作 2023.11.7 お父ちゃん ![]()

三角バランスロボット ーリアクションホイールへの道61ー
先日Aliexpressをまさぐっておりましたらこんなのを見つけました。 https://twitter.com/H0meMadeGarbage/status/1718472423245500559 リアクションホイールによるバランスロボットが凄く安く売っていたのよ。 しかも自立機構が面白い!...
電子工作 2023.11.3 お父ちゃん ![]()

Raspberry Pi Pico W で二足歩行ロボット
以前に Raspberry Pi Pico W を Arduino IDEで開発できるようにして、姿勢制御モジュールを実現しました。 https://homemadegarbage.com/pipicow02 その後に姿勢制御モジュールを応用した二足歩行ロボットを製作しており、ラ...
Raspberry Pi 2023.10.2 お父ちゃん ![]()
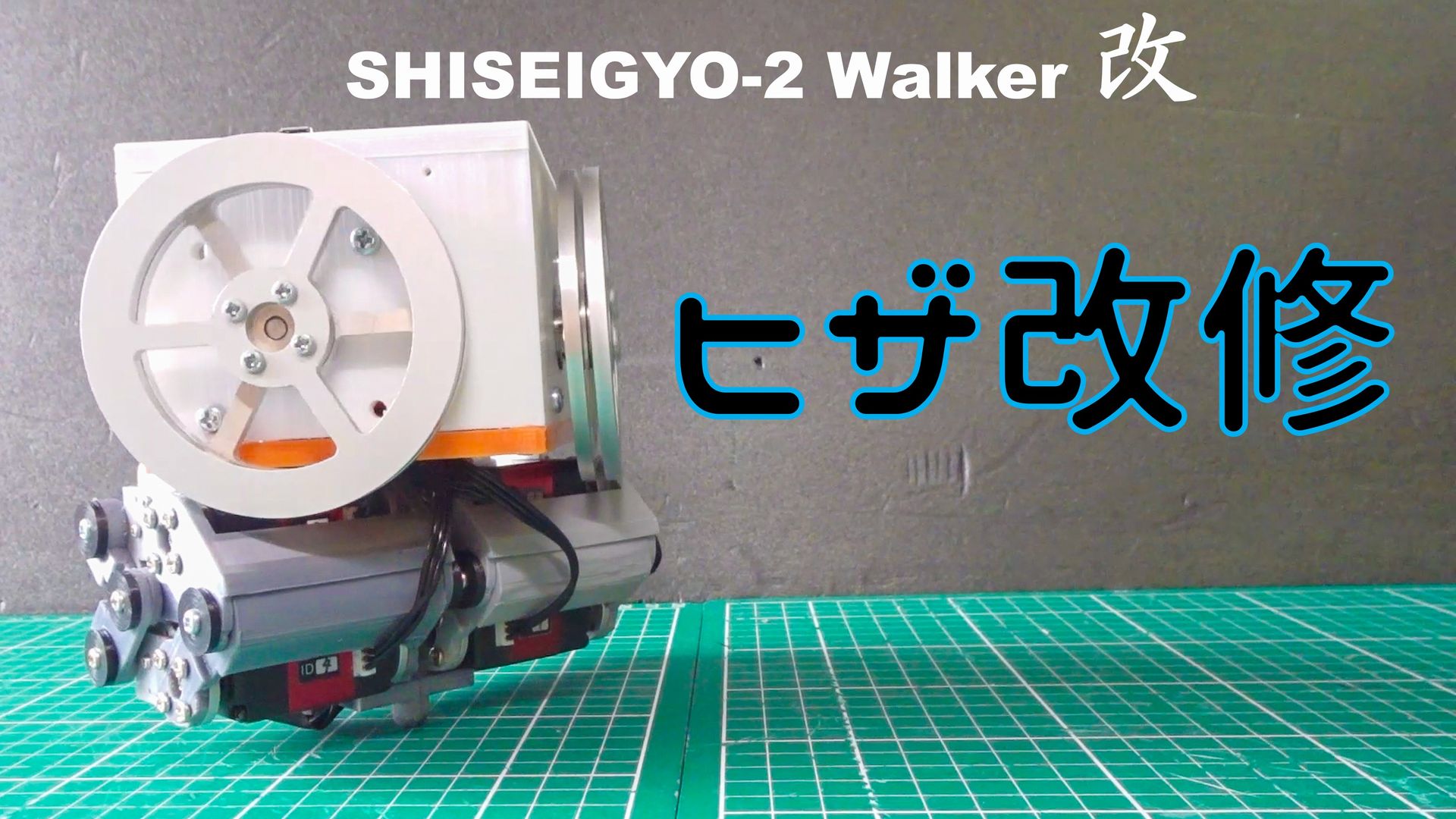
二足歩行ロボット SHISEIGYO-2 Walker 改 のヒザ改修
以前製作した二足歩行ロボット SHISEIGYO-2 Walker 改 ですが、 https://homemadegarbage.com/walker05// 関節がイジっているうちにグニャグニャになり うまく歩けなくなってしまいました。 https://twitter.com/H0me...
電子工作 2023.8.8 お父ちゃん ![]()

SHISEIGYO-1 DC Plus レシピ配布開始 ーリアクションホイールへの道60ー
前回は1軸姿勢制御モジュールの入門的モデルの検討を行いました。 https://homemadegarbage.com/reactionwheel59 SHISEIGYO-1 DC NEO とSHISEIGYO-1 DC Plus の2機種が生まれました。 基板作...
電子工作 2023.7.13 お父ちゃん ![]()
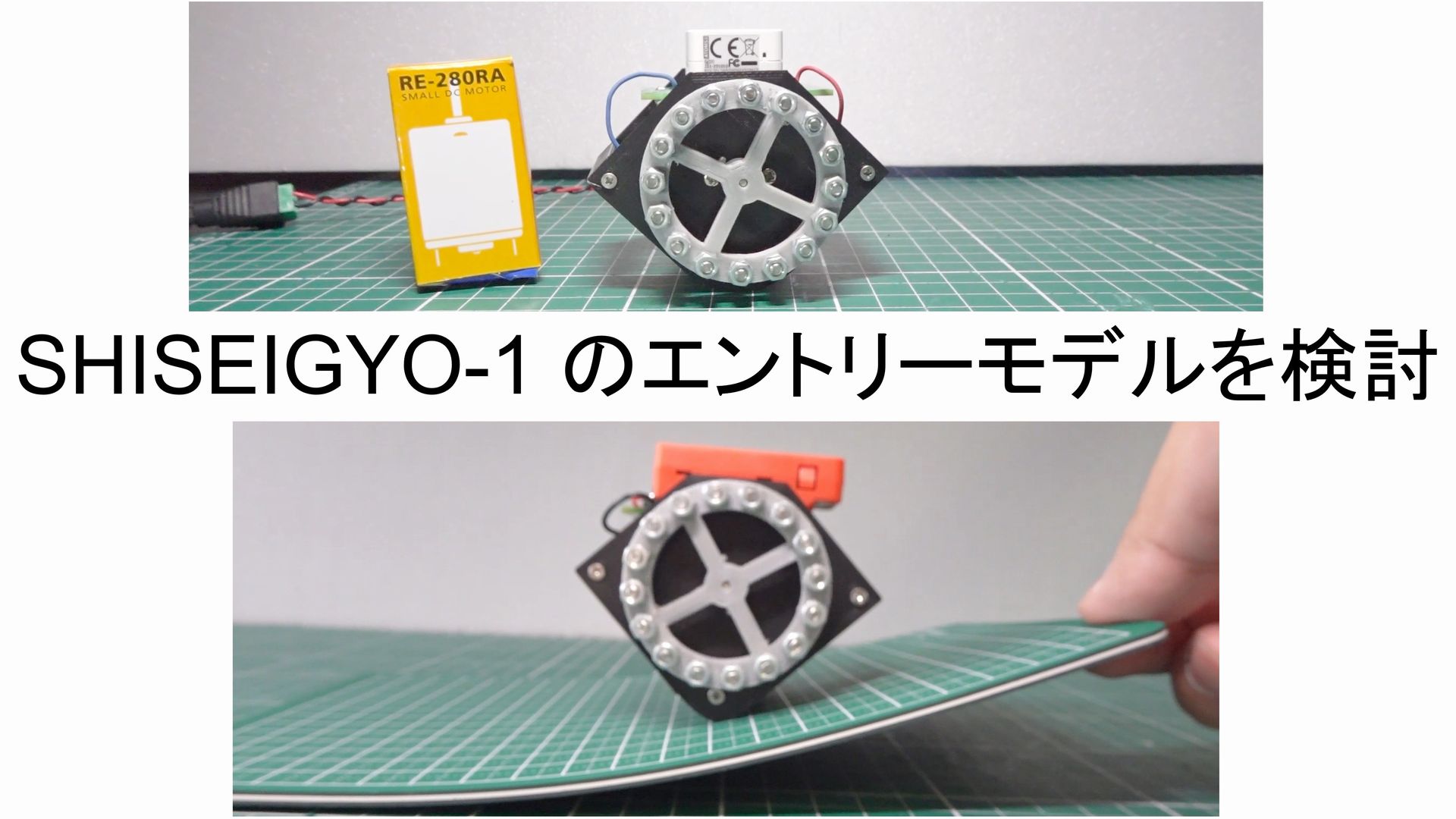
SHISEIGYO-1 のエントリーモデルを検討 ーリアクションホイールへの道59ー
これまで様々な姿勢制御モジュール SHISEIGYO を展開してまいりました。 機種が増えて機能もニッチで細分化しすぎている感もございます。 ここらで誰もがわかりやすくかつ入手性の良い分品で構成された入門的なSHISEIGYOのエントリーモデルが欲しいなと考えました。 ...
電子工作 2023.6.29 お父ちゃん ![]()
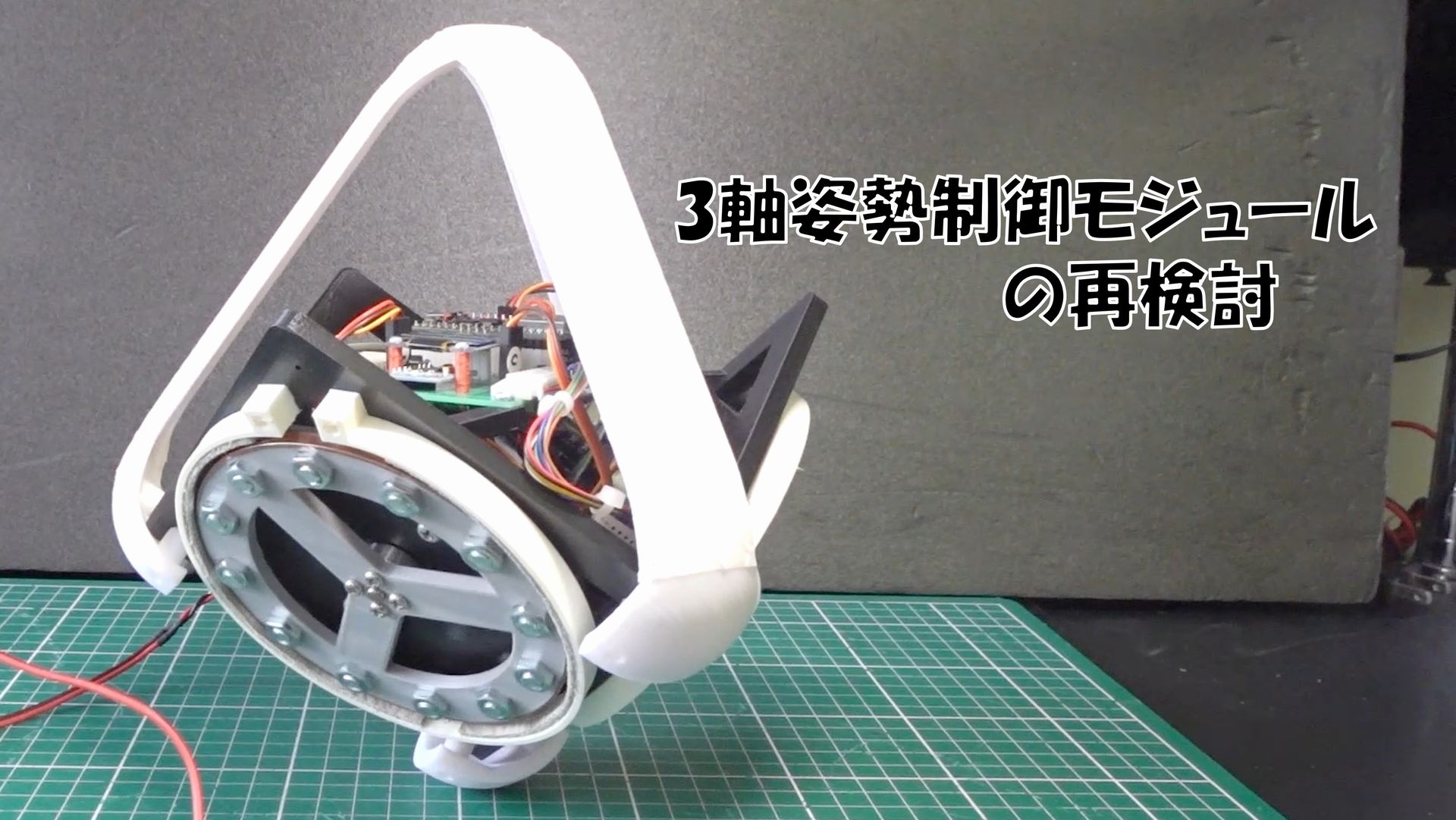
3軸姿勢制御モジュールの再検討 ーリアクションホイールへの道58ー
久しぶりに3軸姿勢制御モジュール (SHISEIGYO-3) の検討を実施しましたので報告いたします。 https://shop.homemadegarbage.com/product/shiseigyo-3-cube/ IMUセンサ位置変更 これまでのSHISE...
電子工作 2023.6.18 お父ちゃん ![]()
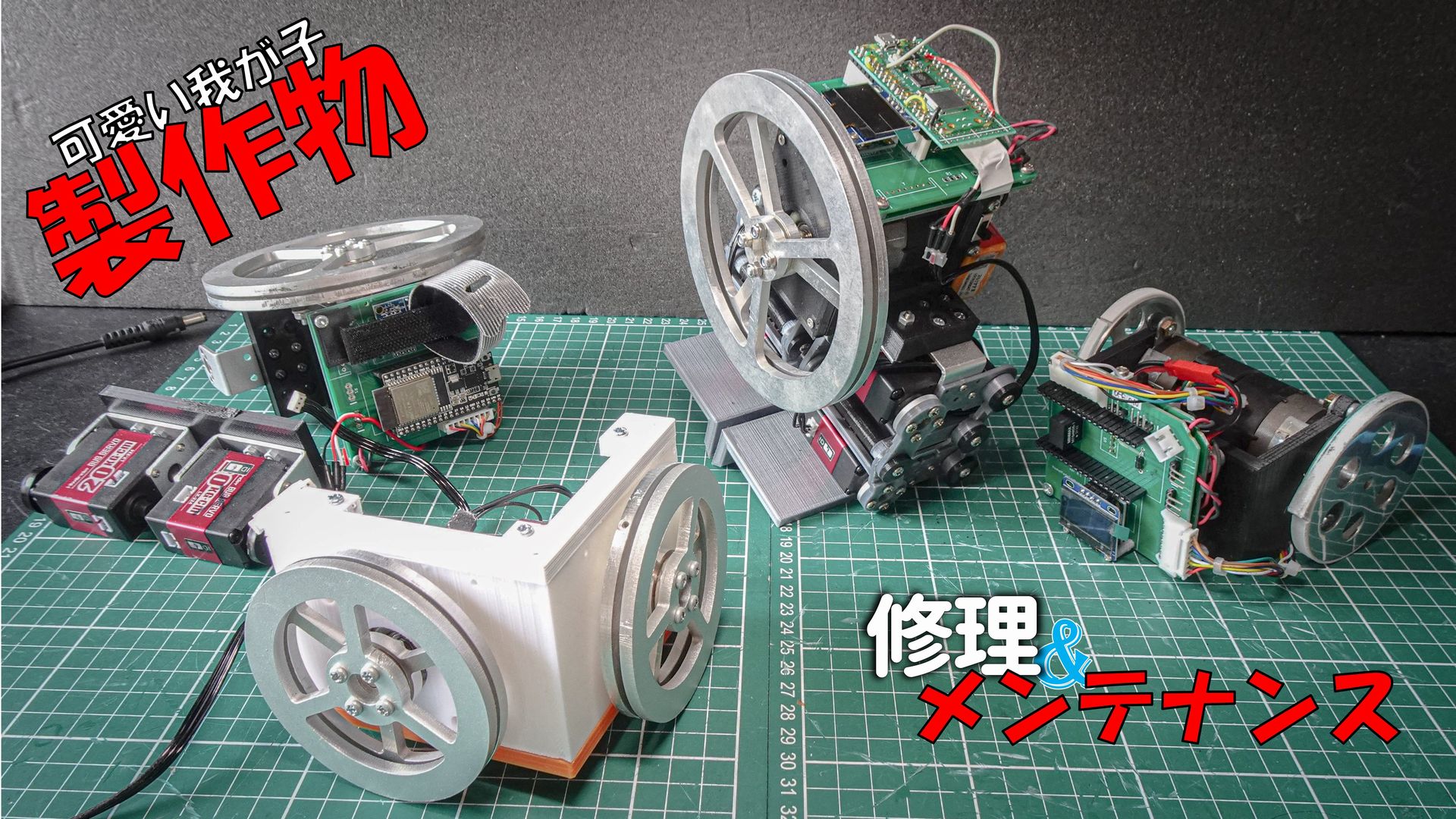
製作物の修理&メンテナンス
私は思いついたら過去の製作物からでもガンガン部品をとって、新たな何かを作っていくスタイルでございます。 直近の製作物も後先考えずに壊してしまうので、後で冷静になった時に後悔することも少なくないです。。 今年も毎年恒例の自作の展示会HomeMadeGarbage the GARAGEに向けて、製...
電子工作 2023.5.27 お父ちゃん ![]()

姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
前回は極小姿勢制御モジュールを製作し報告させていただきました。 https://homemadegarbage.com/reactionwheel56/ 製作した極小姿勢制御モジュール "SHISEIGYO-1 DC センサレス Jr." を頂点に多段重ねの倒立も試しました。 ...
電子工作 2023.3.27 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-2 Walker 改 の検討2
前回は2軸のフライホイールによるバランスで倒立する2足歩行ロボット “SHISEIGYO-2 Walker 改” の実現に向けて足の製作を実施しました。 https://homemadegarbage.com/walker04/ ここでは製作した足を実装して歩行動作を確認します。 ...
電子工作 2023.3.23 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-2 Walker 改 の検討1
前回は足首にモータを追加して旋回動作を確認しました。 https://homemadegarbage.com/onewalkersan11/ 1軸のホイールによるバランスでは旋回動作が難しいという結論を得ましたので、 ここでは2軸の検討を実施しました。 2軸での...
電子工作 2023.3.20 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-1 Walker 参 改 5
前回はマイコンを削減してESP32単体で制御できるようにして、さらに24V DCDCモジュールの低価格化をはかりました。 https://homemadegarbage.com/onewalkersan10// ここでは足を改良して旋回動作できるようにしましたので報告します。 ...
電子工作 2023.3.13 お父ちゃん ![]()