ESP32
二足歩行ロボット SHISEIGYO-1 Walker 参 改
以前 製作した SHISEIGYO-1 Walker Jr. の足のブレードの距離を開けてみたところ。。。 SHISEIGYO-1 Walker Jr. 足を1枚のブレード状につけてないといけないと思っていたけど 離してもいけるなぁ IDRS (倒立角動的再調整システム) が効いてる...
電子工作 2023.2.17 お父ちゃん ![]()
正弦波駆動の応用 ーブラシレスモータ駆動への道11ー
HomeMadeGarbage Advent Calendar 2022 |16日目 前回はクローズドループ正弦波駆動によるブラシレスモータの制御に再挑戦しました。 https://homemadegarbage.com/brushless10 ここでは正弦波駆動を応用して色々...
Advent Calendar / 電子工作 2022.12.16 お父ちゃん ![]()
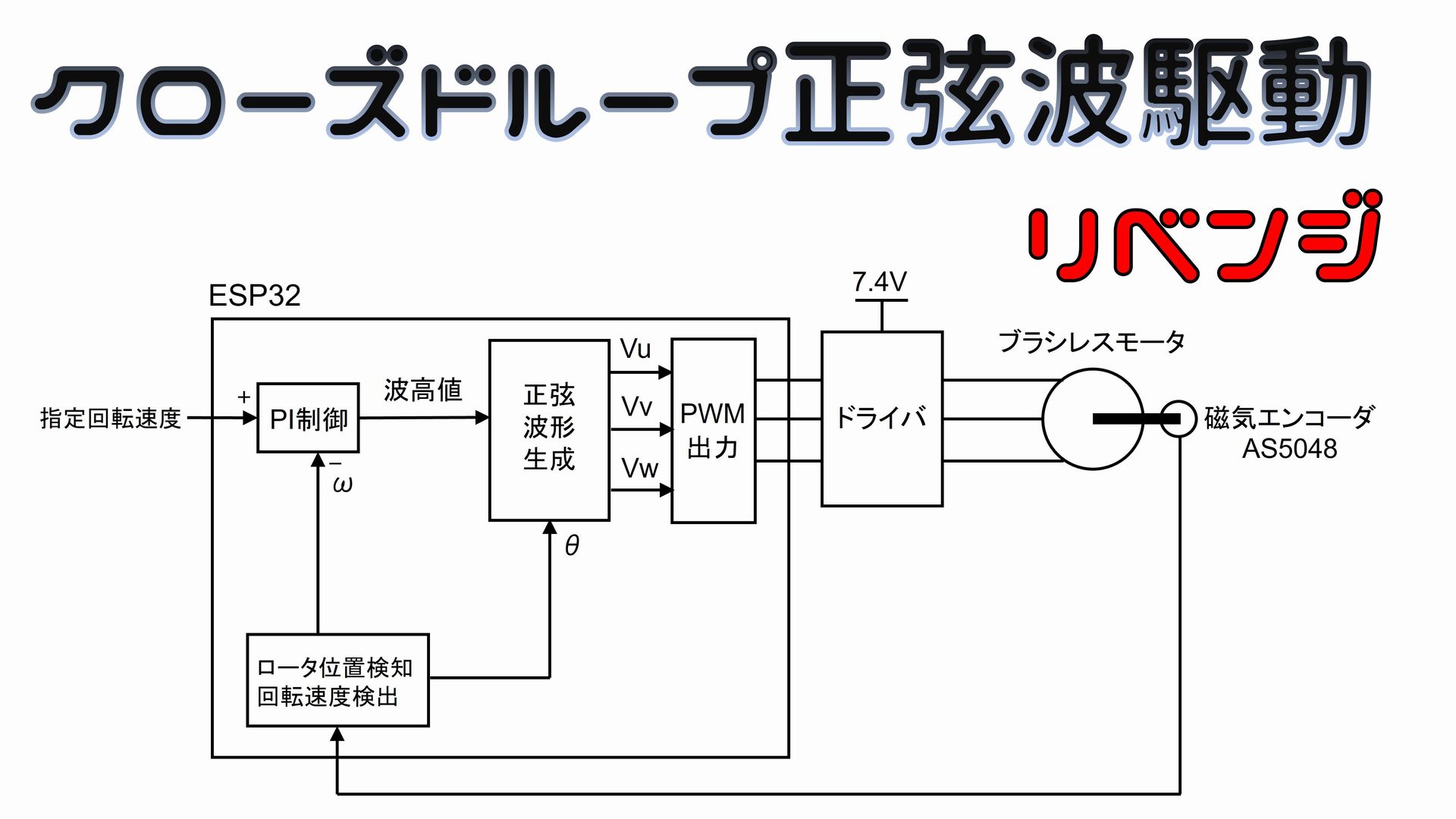
クローズドループ正弦波駆動 リベンジ ーブラシレスモータ駆動への道10ー
HomeMadeGarbage Advent Calendar 2022 |14日目 前回は “50日後にセンサレスベクトル制御してみたい俺” の時に実施したESP32を用いたブラシレスモータのセンサありベクトル制御について報告しました。 https://homemadegarbage.com/...
Advent Calendar / 電子工作 2022.12.14 お父ちゃん ![]()
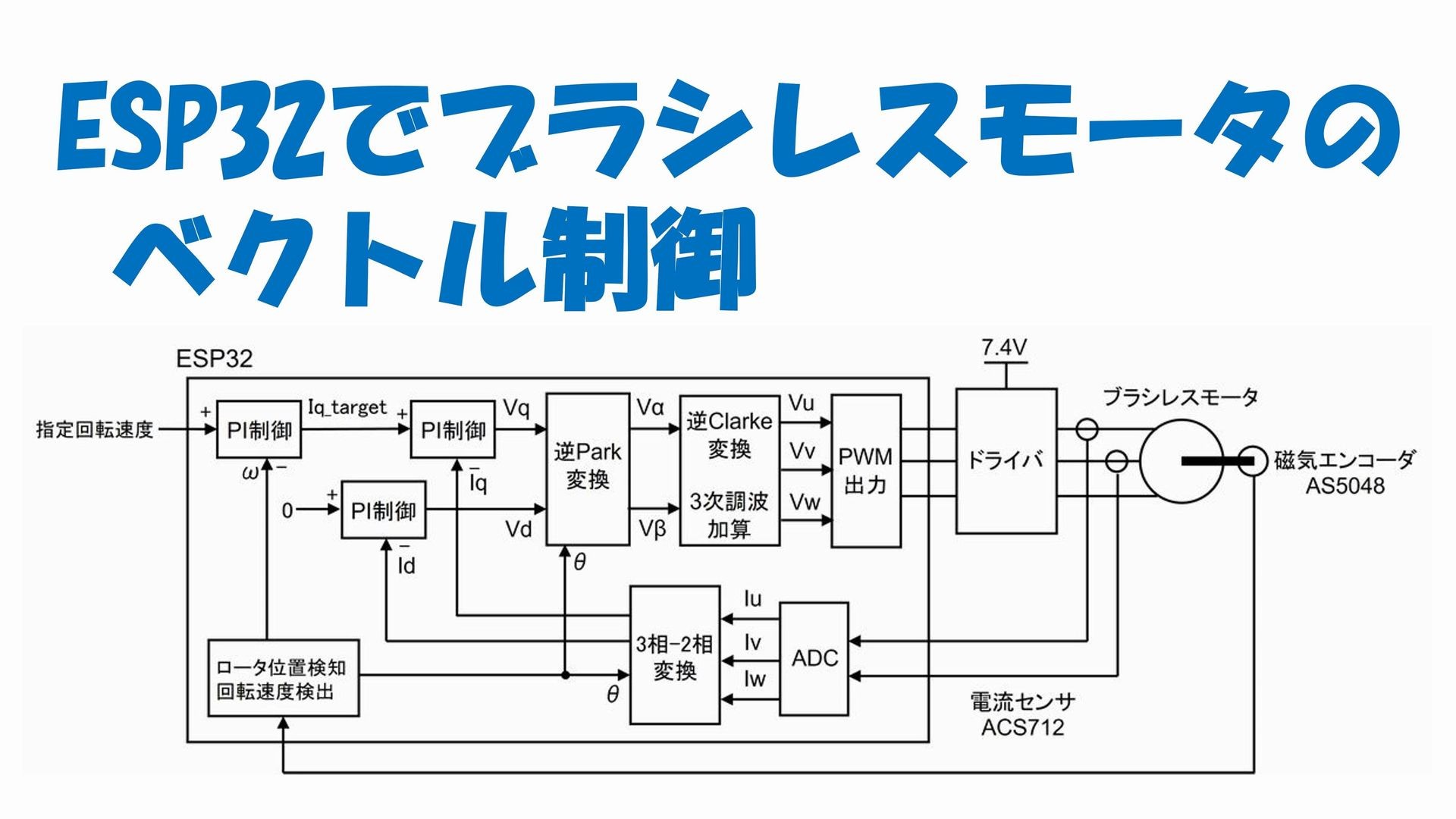
ESP32でベクトル制御 ーブラシレスモータ駆動への道9ー
HomeMadeGarbage Advent Calendar 2022 |12日目 “50日後にセンサレスベクトル制御してみたい俺” と銘打って毎日少しずつモータの勉強を進めていたことを先日ブログにて報告させていただきました。 https://homemadegarbage.com/brush...
Advent Calendar / 電子工作 2022.12.12 お父ちゃん ![]()
50日後にセンサレスベクトル制御してみたい俺 (後編)
HomeMadeGarbage Advent Calendar 2022 |8日目 前回からの続きです。 https://homemadegarbage.com/brushless07 ここからいよいよベクトル制御を目指していきます。 システム構成 回路構成は以下の通り...
Advent Calendar / 電子工作 2022.12.8 お父ちゃん ![]()
50日後にセンサレスベクトル制御してみたい俺 (前編)
HomeMadeGarbage Advent Calendar 2022 |6日目 これまで弊ブログにて ブラシレスモータ駆動への道 と題してブラシレスモータの回転制御に関する勉強をやってきました。 センサレス クローズドループ矩形波制御 オープンループ正弦波駆動 クローズドループ...
Advent Calendar / 電子工作 2022.12.6 お父ちゃん ![]()
次期モデル Mini Pupper 2 ラズパイCM4で足座標指定
前回はラズパイ CM4で直接サーボ角度を指定してミニぷぱ動作を楽しみました。 https://homemadegarbage.com/minipupper2-08/ ここではラズパイ CM4で足の座標を指定しての動作を楽しみました。 ...
Raspberry Pi / 電子工作 2022.11.23 お父ちゃん ![]()
次期モデル Mini Pupper 2 ラズパイCM4でサーボ角度指定
前回はミニぷぱ2でディスプレイ表示とスピーカによる音声再生を楽しみました。 https://homemadegarbage.com/minipupper2-07/// また前々回はRaspberry Pi Compute Module 4 (CM4) からESP32に...
Raspberry Pi / 電子工作 2022.11.15 お父ちゃん ![]()

次期モデル Mini Pupper 2 ラズパイCM4でメディアを堪能
前回はRaspberry Pi Compute Module 4 (CM4) をミニぷぱ基板に搭載してESP32との連動やAlexa連携を楽しみました。 https://homemadegarbage.com/minipupper2-06/ ここではミニぷぱ2基板上でCM4に接続されたデ...
Raspberry Pi / 電子工作 2022.11.13 お父ちゃん ![]()

次期モデル Mini Pupper 2 に Raspberry Pi Compute Module 4 を搭載
これまでは次期モデル Mini Pupper 2 をESP32のみで楽しんでまいりました。 前回はより製品版に近いとされる基板の動作を確認しました。 https://homemadegarbage.com/minipupper2-05// Mini Pupper 2...
Raspberry Pi / 電子工作 2022.11.12 お父ちゃん ![]()
次期モデル Mini Pupper 2 新規基板を味見
前回はMini Pupper 2の初期サンプル基板搭載の6軸IMUセンサ QMI8658C の値を取得して、平行姿勢制御を楽しみました。 https://homemadegarbage.com/minipupper2-04// 今回はより製品版に近い仕様であろう新規基...
電子工作 2022.10.14 お父ちゃん ![]()
次期モデル Mini Pupper 2 でIMUセンサを堪能
前回はサーボのトルクフィードバックやポジションフィードバックを味見しました。 https://homemadegarbage.com/minipupper2-03/ ここでは毎度やるといっていたMini Pupper 2 搭載のIMUの検証をやっとこ実施しましたので報...
電子工作 2022.10.11 お父ちゃん ![]()
次期モデル Mini Pupper 2 で初級ハプティック体験
前回はMini Pupper 2 で動作バリエーションによるダンスを楽しみ、 汎用性の高いコントロールシステムの作成を実施いたしました。 https://homemadegarbage.com/minipupper2-02 ここではサーボモータのトルクフィードバック...
電子工作 2022.10.5 お父ちゃん ![]()
次期モデル Mini Pupper 2 でダンス
前回は提供いただいた新モデル Mini Pupper 2 の初期サンプルをArduino IDEで動作開発できるようにいたしました。 https://homemadegarbage.com/minipupper2-01 ここでは更に動作のバリエーションを増やしてダンスに挑戦いたしました。...
電子工作 2022.10.3 お父ちゃん ![]()
次期モデル Mini Pupper 2 の初期サンプルを味わう
なんとロボット犬 ミニぷぱの新モデル Mini Pupper 2 の初期サンプルを提供いただけました! ここでは前機種との違いを実感しながら Arduino IDEで動作させるところまで記載いたします。 https://homemadegarbage.com/minipupper01/ ...
電子工作 2022.10.2 お父ちゃん ![]()