ESP32
そして I2Cマルチプレクサ
これまでSimpleFOCによるブラシレスモータ制御で倒立振子やリアクションホイール姿勢制御モジュールなどの製作を楽しんできました。 モータを複数制御する際はエンコーダとしてA/B相出力のあるAS5601を使用してきました。 A/B相出力ではパルスカウンタで回転を検知するため異常回転時に絶対位置...

3重点倒立 ーリアクションホイールへの道70ー
先日 SimpleFOCでのブラシレスモータ制御による3軸姿勢制御モジュールを製作しました。 https://homemadegarbage.com/simplefoc08/ これにより手元に3機の3軸姿勢制御モジュールがそろいましたのでちょっと余計なことをしてみました。 &n...
電子工作 2024.10.7 お父ちゃん ![]()
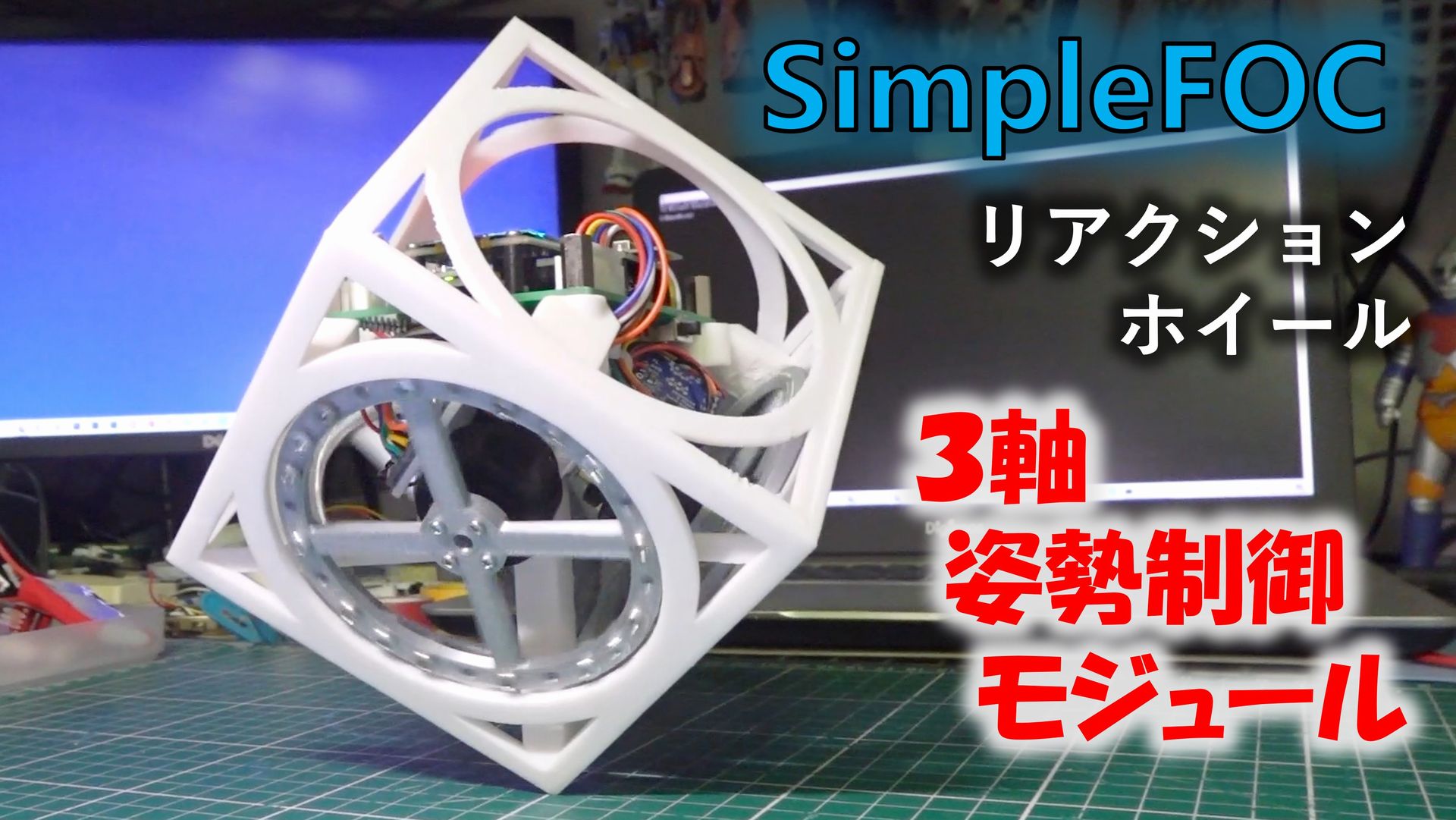
SimpleFOC で3軸姿勢制御モジュール
前回までにSimpleFOCによるブラシレスモータの制御での1軸姿勢制御モジュールの製作・動作確認を実施しております。 https://homemadegarbage.com/simplefoc07 ここではコレを発展させてホイール3軸での点倒立姿勢制御モジュールの製作を実施しま...
電子工作 2024.10.4 お父ちゃん ![]()

SimpleFOC でリアクションホイール姿勢制御モジュール2
前回はSimpleFOCによるリアクションホイール姿勢制御モジュールの制御を楽しみました。 https://homemadegarbage.com/simplefoc06/ モータはジンバル用の小型ブラシレスモータを使用しました。 [amazonjs asin="B09JZ56...
電子工作 2024.9.30 お父ちゃん ![]()

SimpleFOC でリアクションホイール姿勢制御モジュール
前回はSimpleFOCライブラリを用いてブラシレスモータを制御し倒立振子を製作しました。 https://homemadegarbage.com/simplefoc05/ ここではリアクションホイールによる姿勢制御モジュールを製作したので報告いたします。 ...
電子工作 2024.9.25 お父ちゃん ![]()
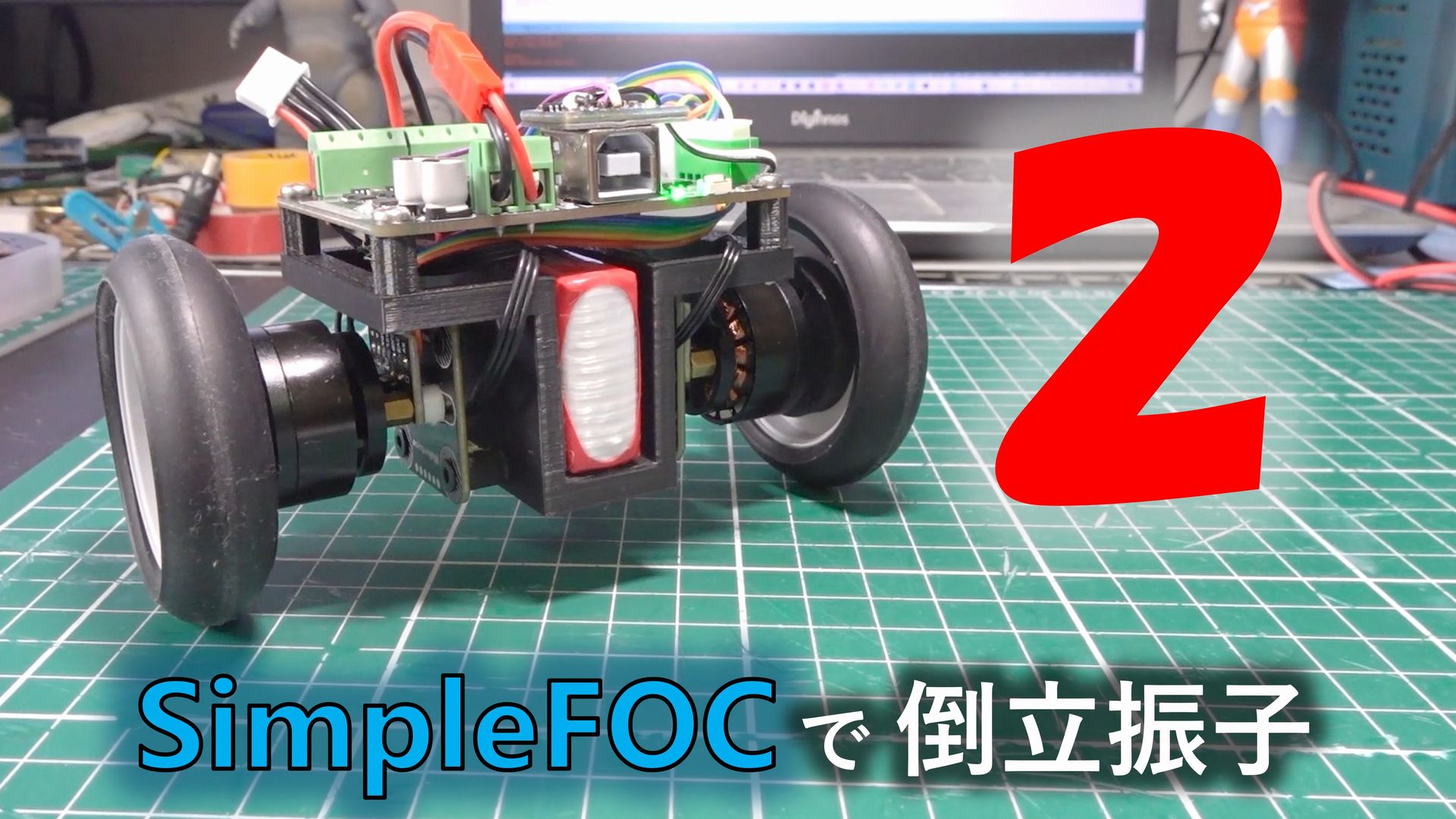
SimpleFOC で倒立振子2
前回はSimpleFOCによる倒立振子をESP32搭載のMakerbase社製のコントローラを後いて検証いたしました。 https://homemadegarbage.com/simplefoc04 Makerbase社製のコントローラ ここでは前回の問題点...
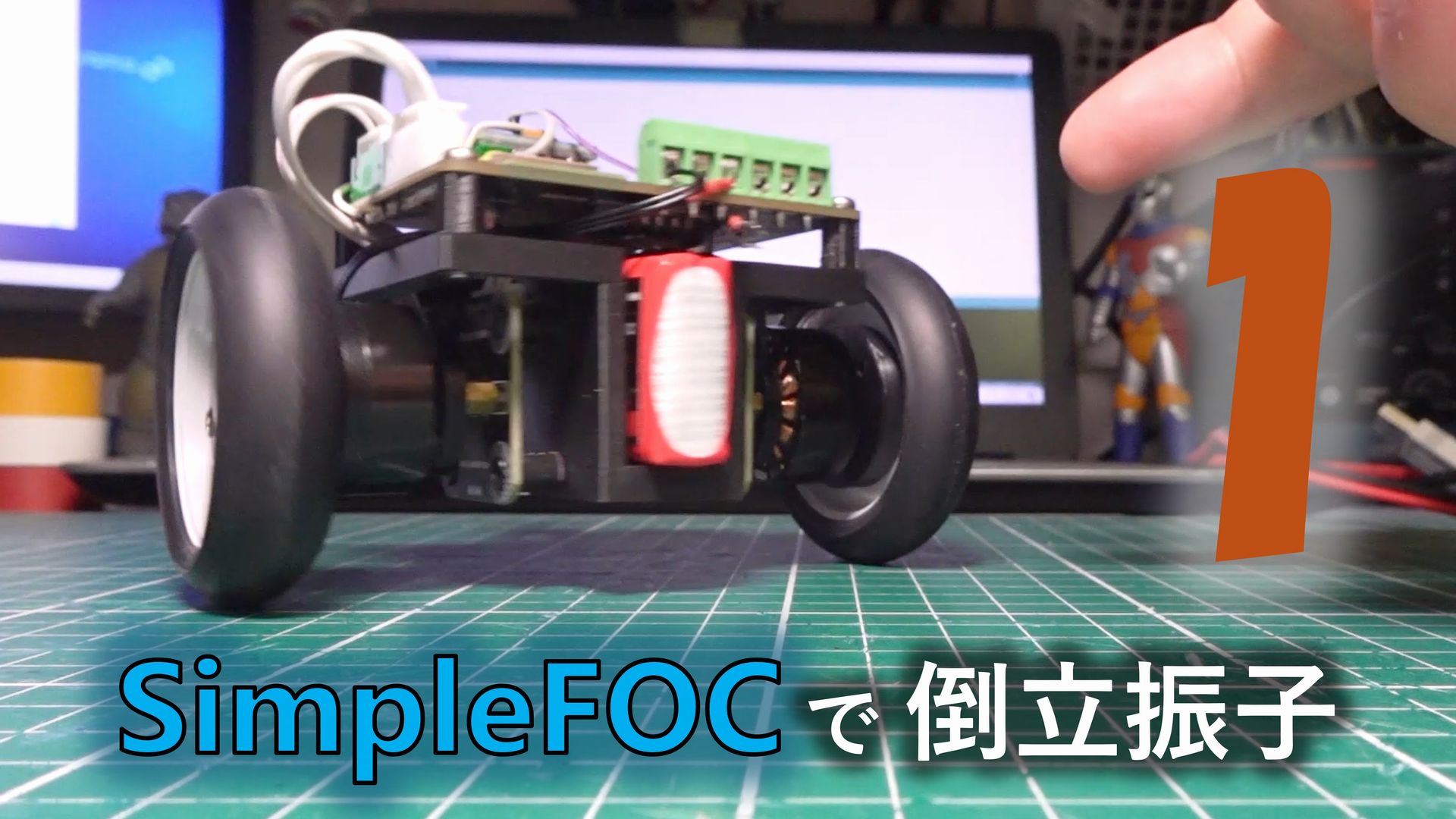
SimpleFOC で倒立振子1
前回はSimpleFOCの応用を考え、姿勢制御モジュールの検討などを実施しました。 https://homemadegarbage.com/simplefoc03/ ここでは倒立振子の検討について報告いたします。 機体製作 これまで同様にMakerbase社製の...
電子工作 2024.9.18 お父ちゃん ![]()
SimpleFOC ライブラリの応用
前回までにMakerbase社製 ESP32搭載ブラシレスモータコントローラを用いてSimpleFOCライブラリの基本的学習を済ませました。 https://homemadegarbage.com/simplefoc02 SimpleFOCへの理解が深まりましたので、いよいよ応用です。 応用し...
電子工作 2024.9.17 お父ちゃん ![]()
SimpleFOC ライブラリの勉強2
前回はMakerbase社製 ESP32搭載ブラシレスモータコントローラを元にSimpleFOCの学習を開始いたしました。 https://homemadegarbage.com/simplefoc01/ オープンループ制御はもちろんのことエンコーダによるクローズドループ制御もSimpleFOC...
電子工作 2024.9.11 お父ちゃん ![]()
SimpleFOC ライブラリの勉強1
趣味のAliExpressサーフィンをしていましたら面白いものを見つけたので購入してみました。 ESP32ベースのブラシレスモータコントローラとエンコーダ付きモータを購入していじってみましたので報告させていただきます。 購入品 コメはなくとも… pic.twi...
電子工作 2024.9.10 お父ちゃん ![]()

PS4コントローラ で ロボティクス
前々からやってみたいと思っていたゲームコントローラによるロボット制御に挑戦してみました。 PS4コントローラとESP32連動 以下の記事を参考にPS4コントローラとESP32の連動を試しました。 [bc url="https://gijin77.blog.jp/archives/...
電子工作 2024.7.18 お父ちゃん ![]()

狭ピッチLEDテープを試してみた
長いこと欲しい欲しいと憧れの思いを持っていた狭ピッチのLEDテープをアリエクで見つけました。 [bc url="https://ja.aliexpress.com/item/1005006171052147.html?spm=a2g0o.order_list.order_list_main.10....

SHISEIGYO-3 DC Go がゆく ーリアクションホイールへの道69ー
ずーーっと3軸姿勢制御モジュールの活用方法を考えてきて答えを出せずにいたのですが、ドローン用の小型モータによる3軸モジュール SHISEIGYO-3 DC を完成させたのを機に実際に手を動かす勇気めいたものが湧いてきました。 https://homemadegarbage.com/reaction...
電子工作 2024.5.30 お父ちゃん ![]()
二足歩行ロボット 歩行再考
以前製作した二足歩行ロボットをあらためておいじりしたいと思いたちました。 https://homemadegarbage.com/robottrip01 前回は以下のようにロボットの歩行の検証を実施しました。 更に歩行について研究しましたので報告いたします。...
電子工作 2024.5.9 お父ちゃん ![]()

二足歩行ロボット SHISEIGYO-1 Walker 再考
先日、以前製作した二足歩行ロボット SHISEIGYO-1 Walker の動画をみてたら新鮮にいい動きだなと思いましたよ。 https://twitter.com/H0meMadeGarbage/status/1718142708714524859 https://homemadegarbag...
電子工作 2023.11.7 お父ちゃん ![]()