
ESP32
三角バランスロボット ーリアクションホイールへの道61ー
先日Aliexpressをまさぐっておりましたらこんなのを見つけました。 https://twitter.com/H0meMadeGarbage/status/1718472423245500559 リアクションホイールによるバランスロボットが凄く安く売っていたのよ。 しかも自立機構が面白い!...
電子工作 2023.11.3 お父ちゃん ![]()
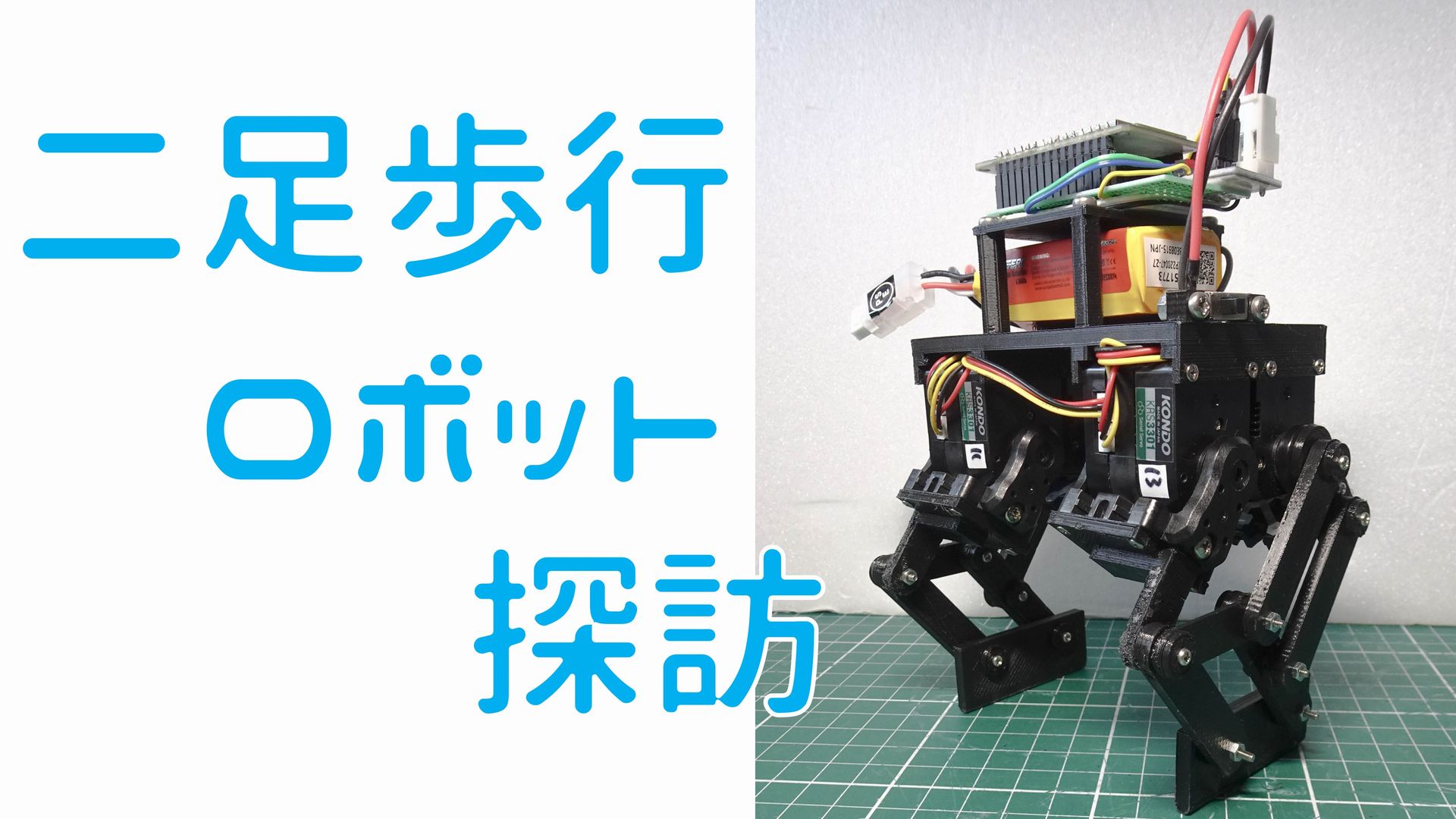
二足歩行ロボット 探訪
X (旧Twitter) にて面白いロボットを目にし、改めて二足歩行ロボットを調査・製作してみたくなりました。 https://twitter.com/H0meMadeGarbage/status/1708976352165298456 考察と方針 コチラのロボッ...
電子工作 2023.10.8 お父ちゃん ![]()
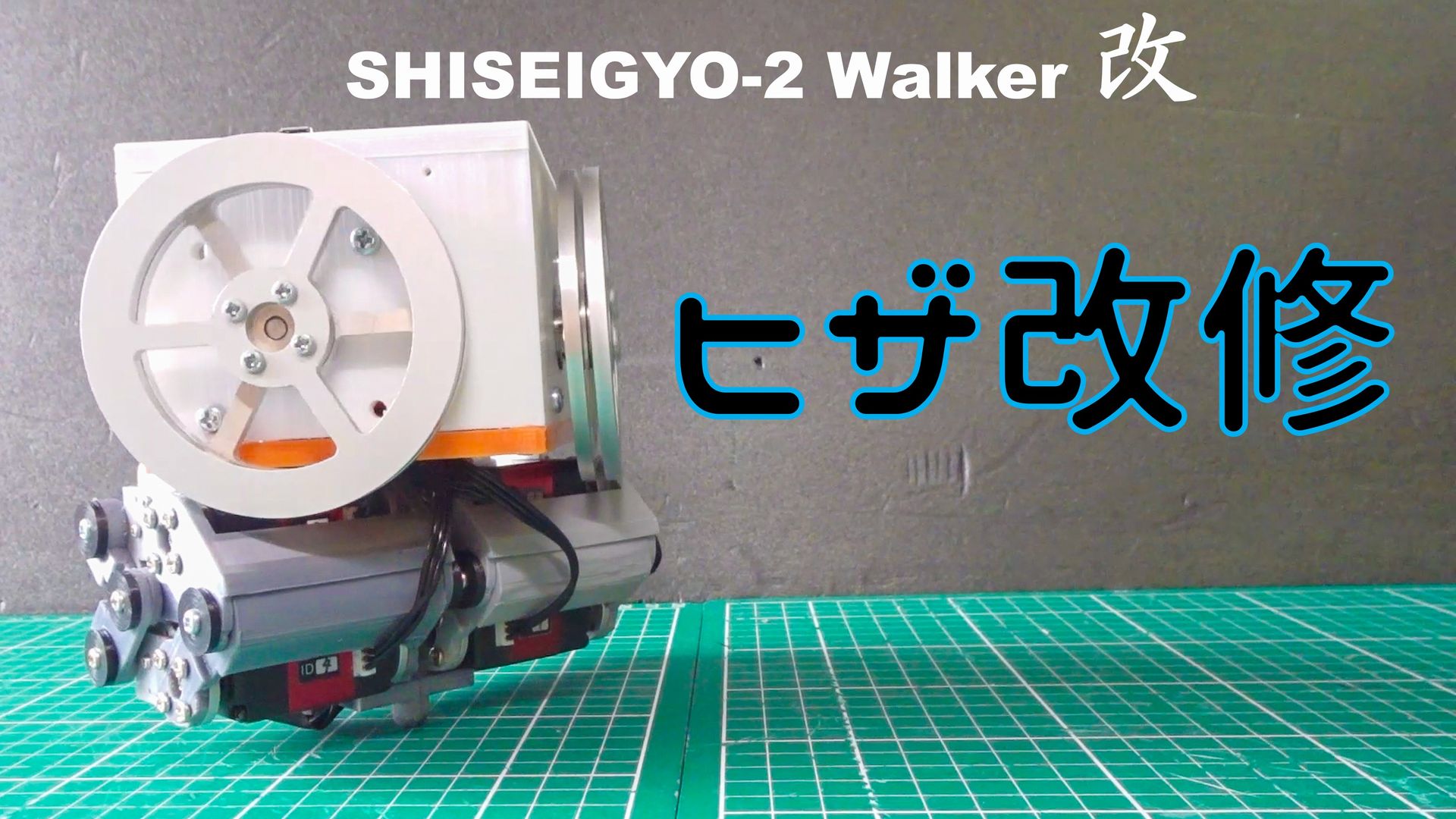
二足歩行ロボット SHISEIGYO-2 Walker 改 のヒザ改修
以前製作した二足歩行ロボット SHISEIGYO-2 Walker 改 ですが、 https://homemadegarbage.com/walker05// 関節がイジっているうちにグニャグニャになり うまく歩けなくなってしまいました。 https://twitter.com/H0me...
電子工作 2023.8.8 お父ちゃん ![]()

SHISEIGYO-1 DC Plus レシピ配布開始 ーリアクションホイールへの道60ー
前回は1軸姿勢制御モジュールの入門的モデルの検討を行いました。 https://homemadegarbage.com/reactionwheel59 SHISEIGYO-1 DC NEO とSHISEIGYO-1 DC Plus の2機種が生まれました。 基板作...
電子工作 2023.7.13 お父ちゃん ![]()
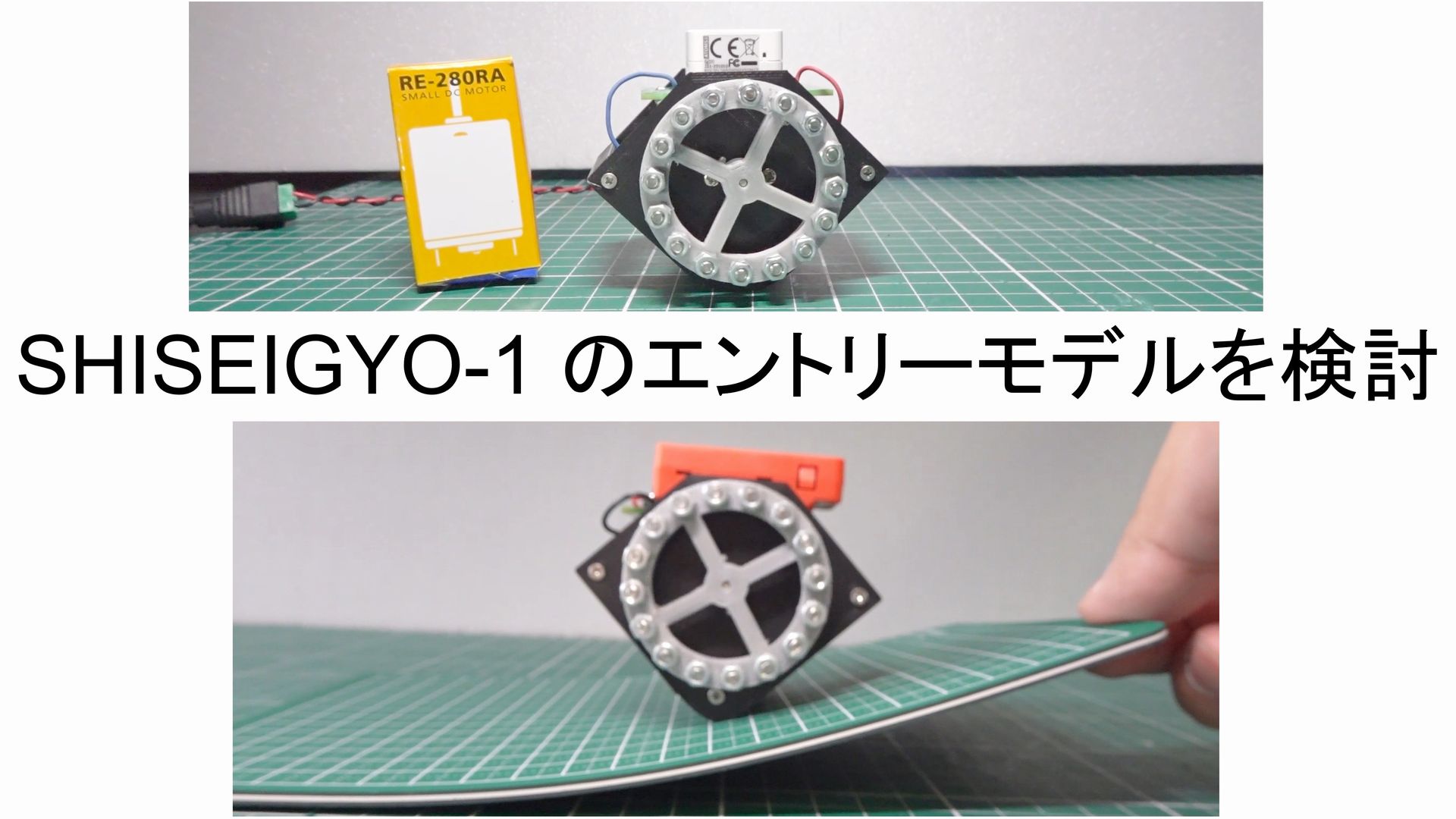
SHISEIGYO-1 のエントリーモデルを検討 ーリアクションホイールへの道59ー
これまで様々な姿勢制御モジュール SHISEIGYO を展開してまいりました。 機種が増えて機能もニッチで細分化しすぎている感もございます。 ここらで誰もがわかりやすくかつ入手性の良い分品で構成された入門的なSHISEIGYOのエントリーモデルが欲しいなと考えました。 ...
電子工作 2023.6.29 お父ちゃん ![]()
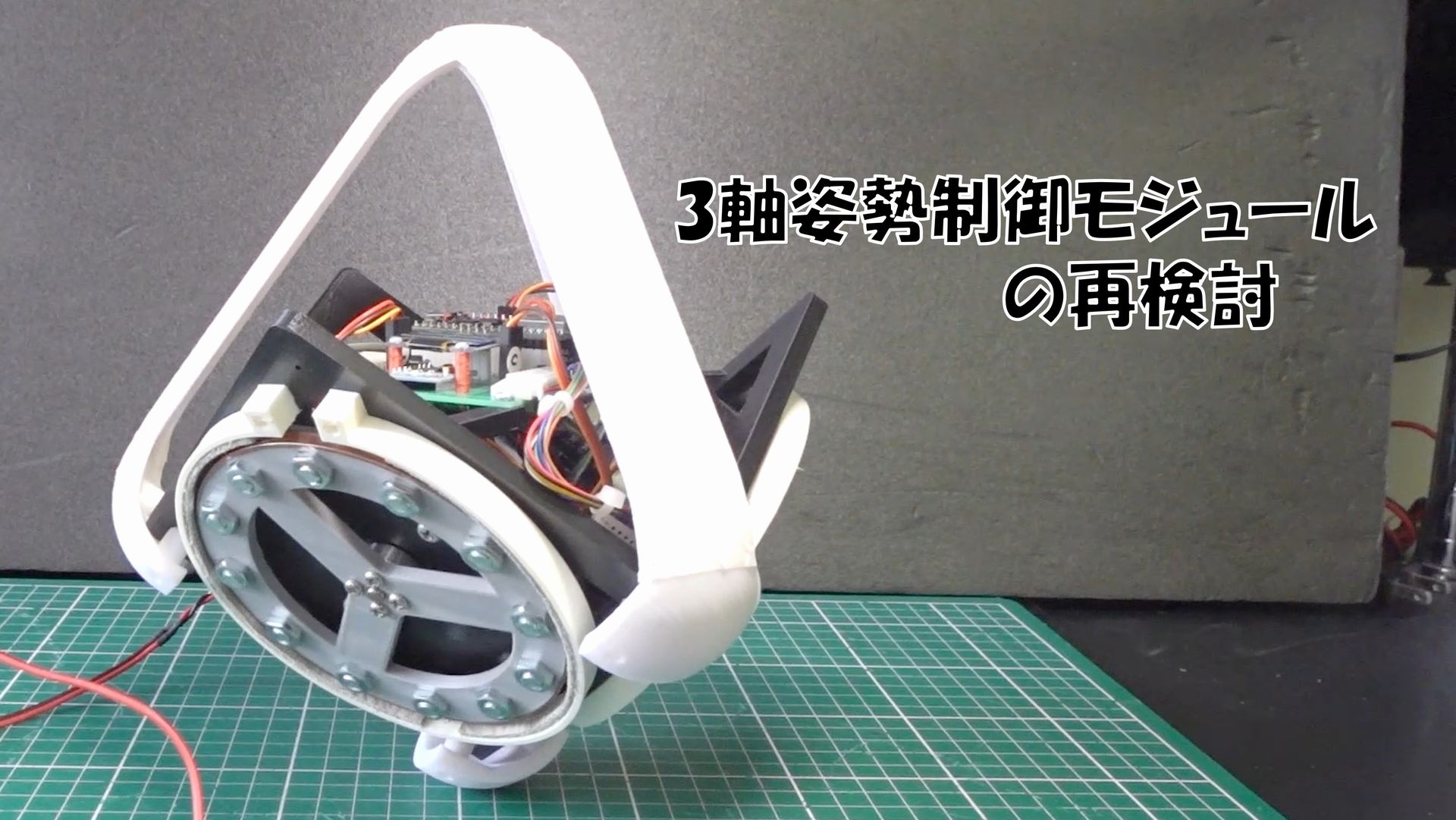
3軸姿勢制御モジュールの再検討 ーリアクションホイールへの道58ー
久しぶりに3軸姿勢制御モジュール (SHISEIGYO-3) の検討を実施しましたので報告いたします。 https://shop.homemadegarbage.com/product/shiseigyo-3-cube/ IMUセンサ位置変更 これまでのSHISE...
電子工作 2023.6.18 お父ちゃん ![]()
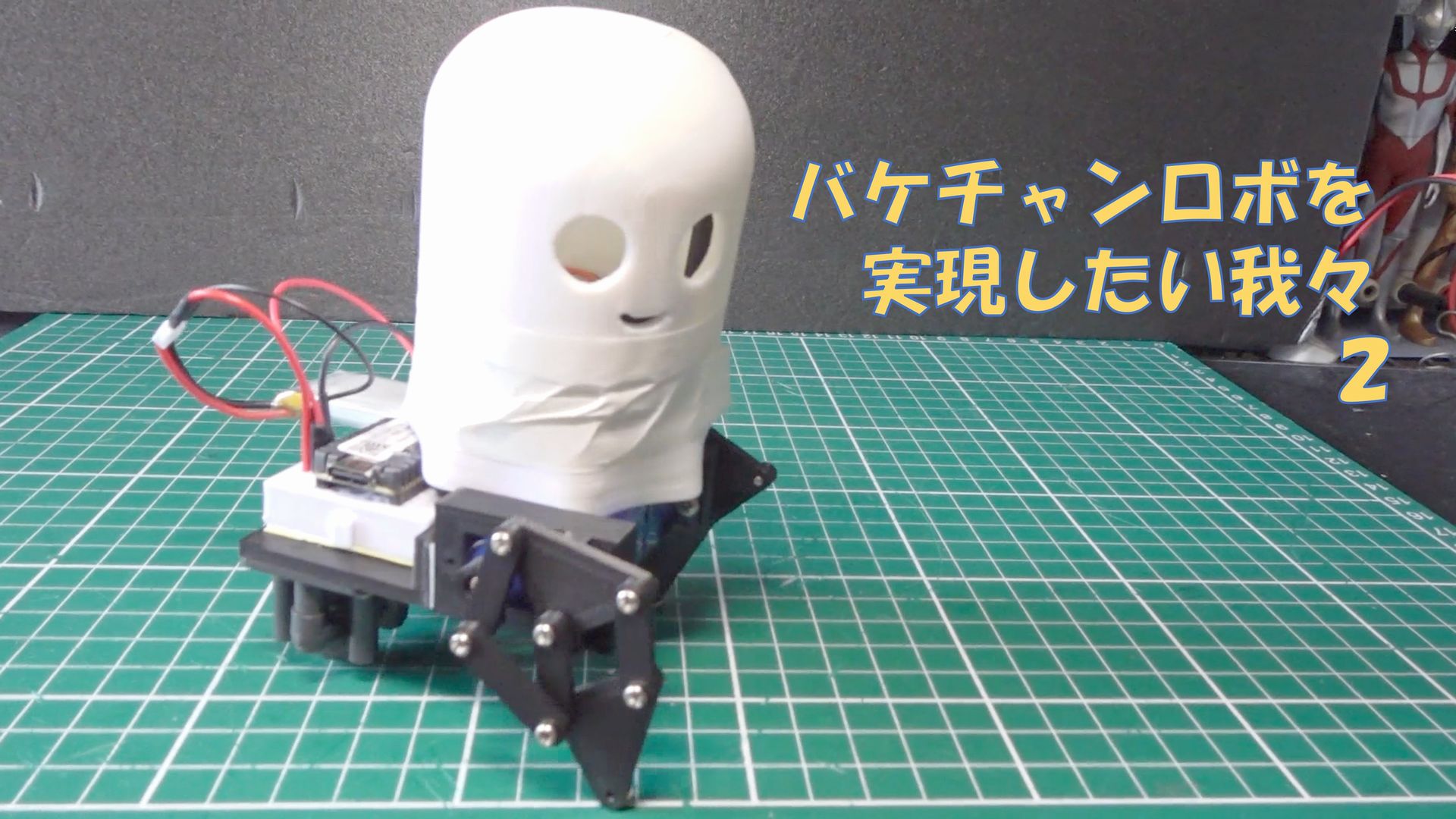
バケチャンロボを実現したい我々2
前回はお母ちゃんが発案した"バケチャンロボ"の実現を目指して、ボディや目の表示の検討を実施しました。 https://homemadegarbage.com/bakerobo01/ 更に検討を進めましたので報告いたします。 電子ペーパーディスプレイ...
電子工作 2023.5.2 お父ちゃん ![]()
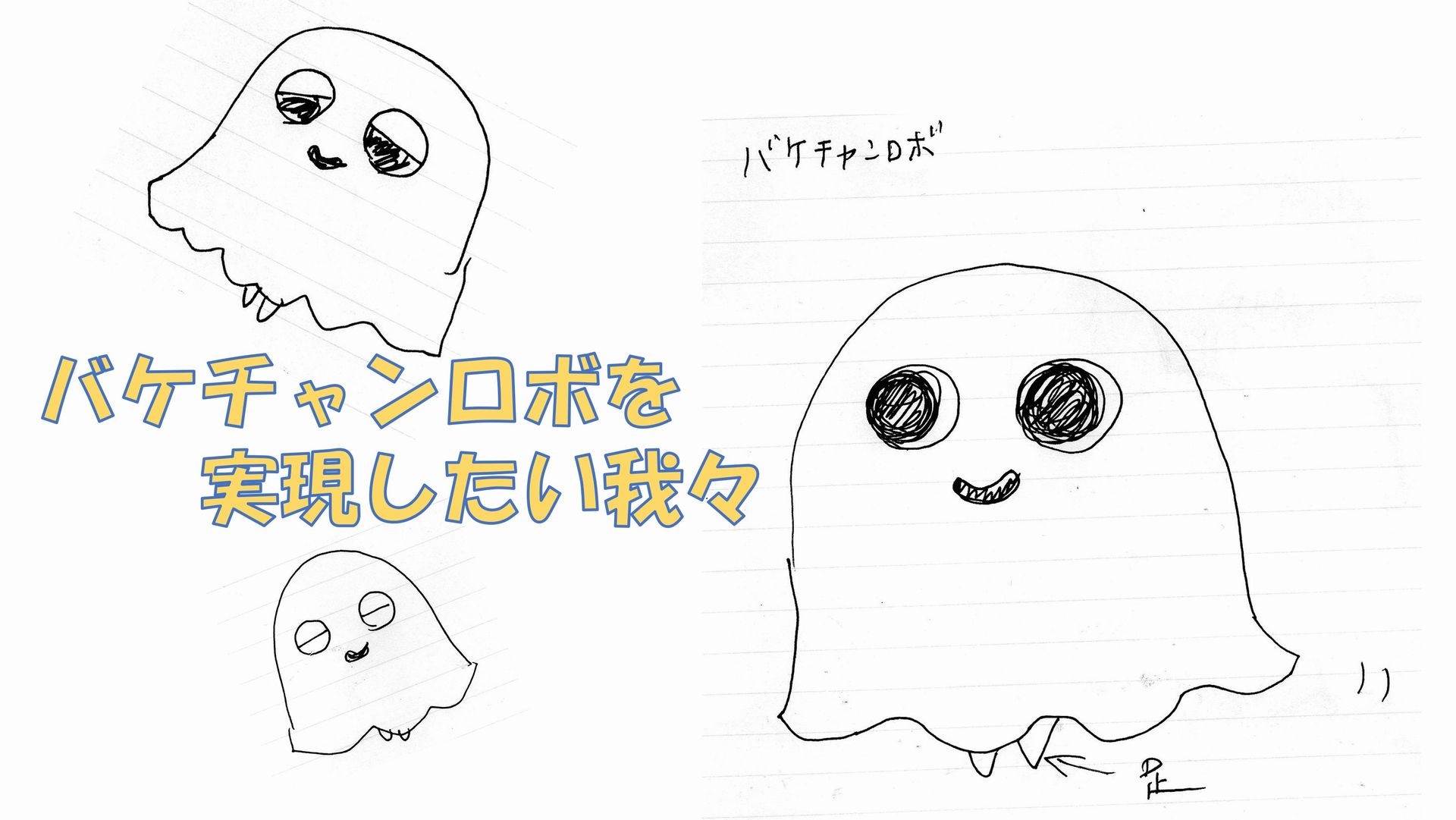
バケチャンロボを実現したい我々
お母ちゃんにもっとカワイイ ロボット作れば 多くの人に喜ばれるんじゃない?と提案されたのですが。。 俺にそんなの作れるわけないだろ!それならデザインしてくれよと。 そんな経緯をラジオでも話しておりましたが お母ちゃんのデザイン画がコチラ。。。 なんだこれ。。。? バケ...
電子工作 2023.4.14 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-2 Walker 改 の検討2
前回は2軸のフライホイールによるバランスで倒立する2足歩行ロボット “SHISEIGYO-2 Walker 改” の実現に向けて足の製作を実施しました。 https://homemadegarbage.com/walker04/ ここでは製作した足を実装して歩行動作を確認します。 ...
電子工作 2023.3.23 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-2 Walker 改 の検討1
前回は足首にモータを追加して旋回動作を確認しました。 https://homemadegarbage.com/onewalkersan11/ 1軸のホイールによるバランスでは旋回動作が難しいという結論を得ましたので、 ここでは2軸の検討を実施しました。 2軸での...
電子工作 2023.3.20 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-1 Walker 参 改 5
前回はマイコンを削減してESP32単体で制御できるようにして、さらに24V DCDCモジュールの低価格化をはかりました。 https://homemadegarbage.com/onewalkersan10// ここでは足を改良して旋回動作できるようにしましたので報告します。 ...
電子工作 2023.3.13 お父ちゃん ![]()
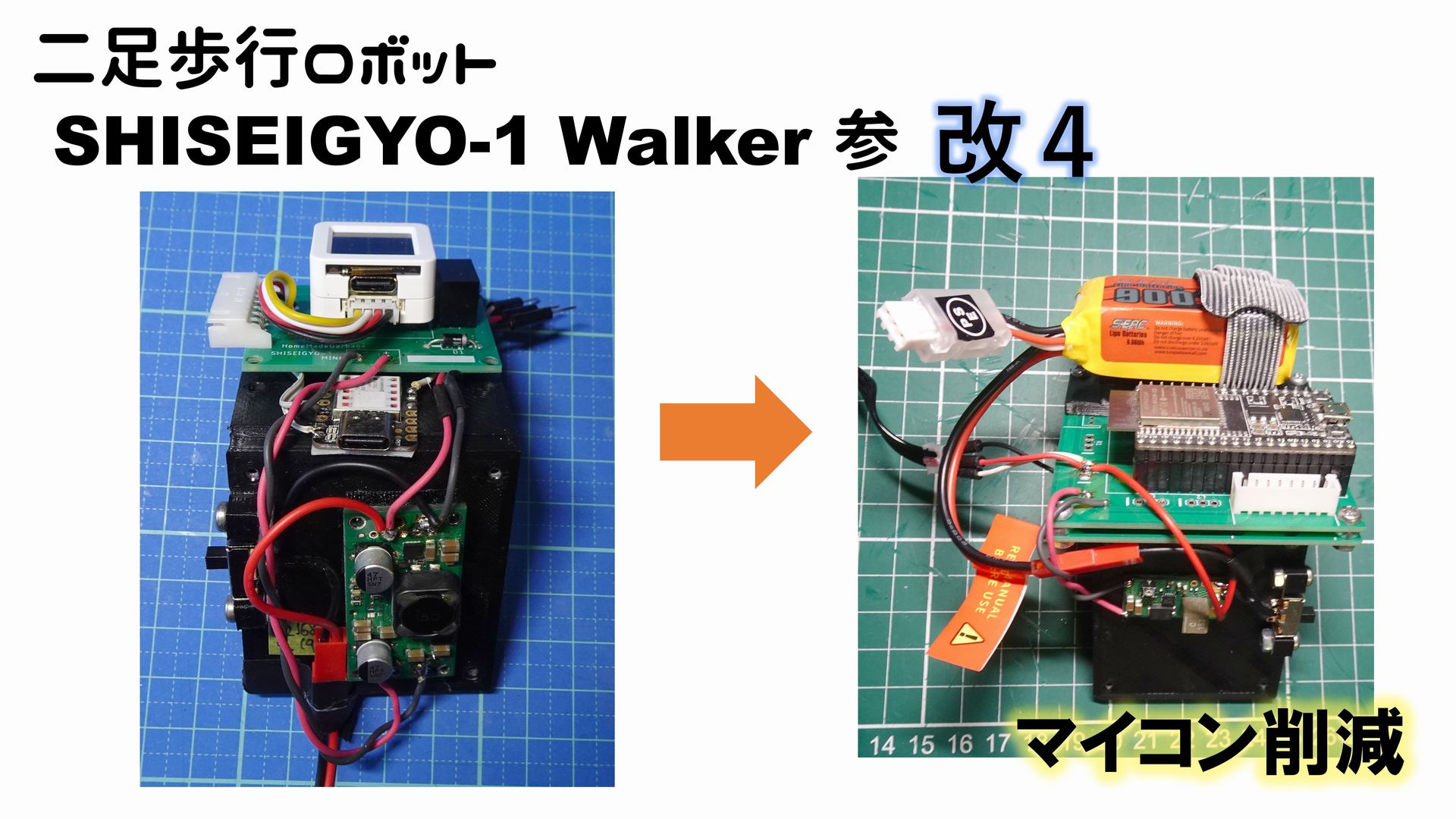
二足歩行ロボット SHISEIGYO-1 Walker 参 改 4
これまでSHISEIGYO-1 Walker 参 の改良版についてはマイコンを2台使用して制御していたが、今回削減をはかったので報告します。 https://homemadegarbage.com/onewalkersan09/ 従来システム構成 以下がこれまでの...
電子工作 2023.3.8 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-1 Walker 改
これまでは SHISEIGYO-1 Walker 参 の足を改良して二足歩行動作を検証してきました。 https://homemadegarbage.com/onewalkersan09 ここでは 初代 SHISEIGYO-1 Walker の足を改良して歩行動作の検証を実施しま...
電子工作 2023.3.7 お父ちゃん ![]()
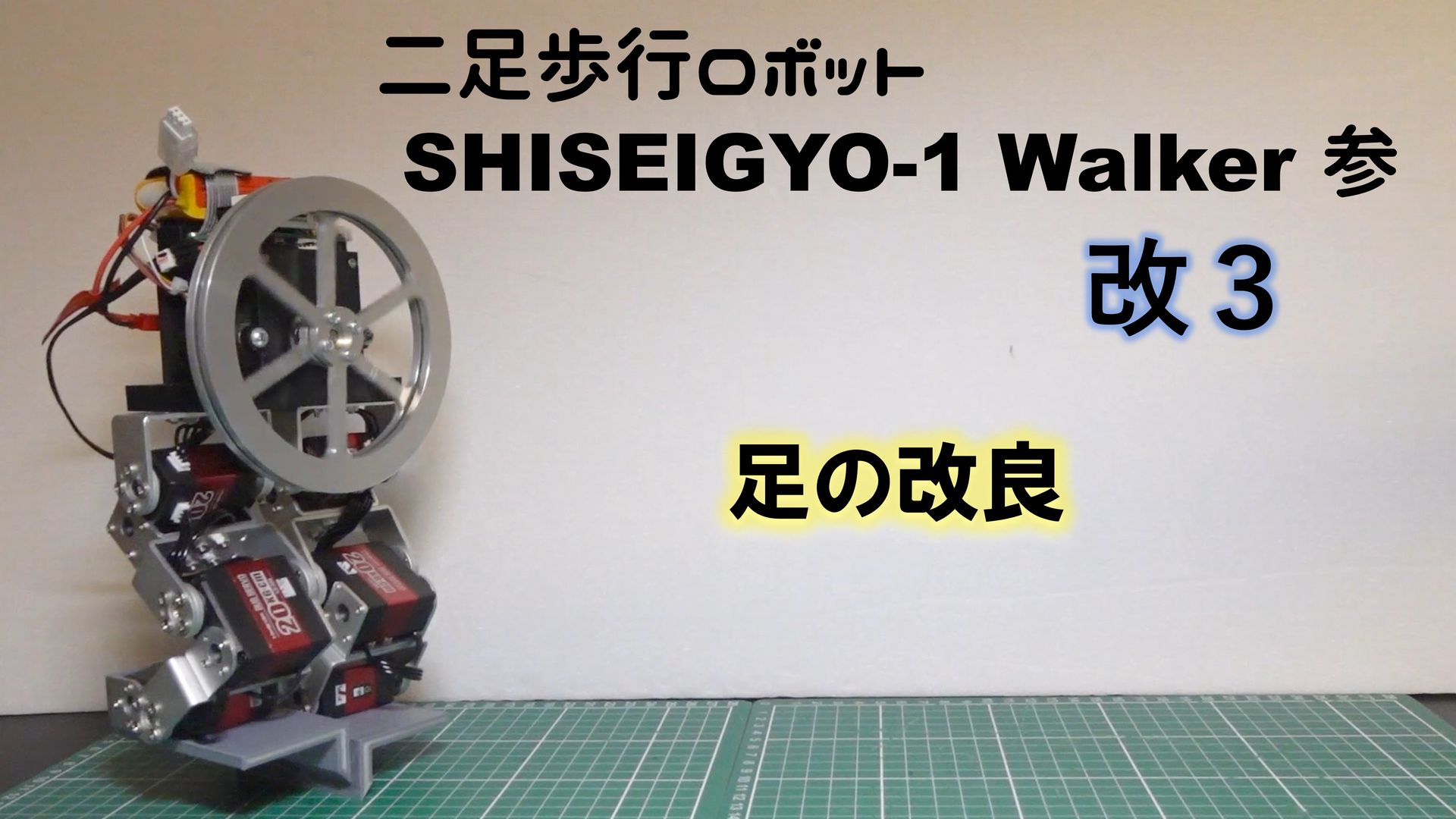
二足歩行ロボット SHISEIGYO-1 Walker 参 改 3
前回はSHISEIGYO-1 Walker 参 改 の足に平行リンク機構を導入しサーボ削減しての歩行動作を確認しました。 https://homemadegarbage.com/onewalkersan08// ここでは、通常の足に戻して再度歩行動作の検証を行いました。 ...
電子工作 2023.2.24 お父ちゃん ![]()
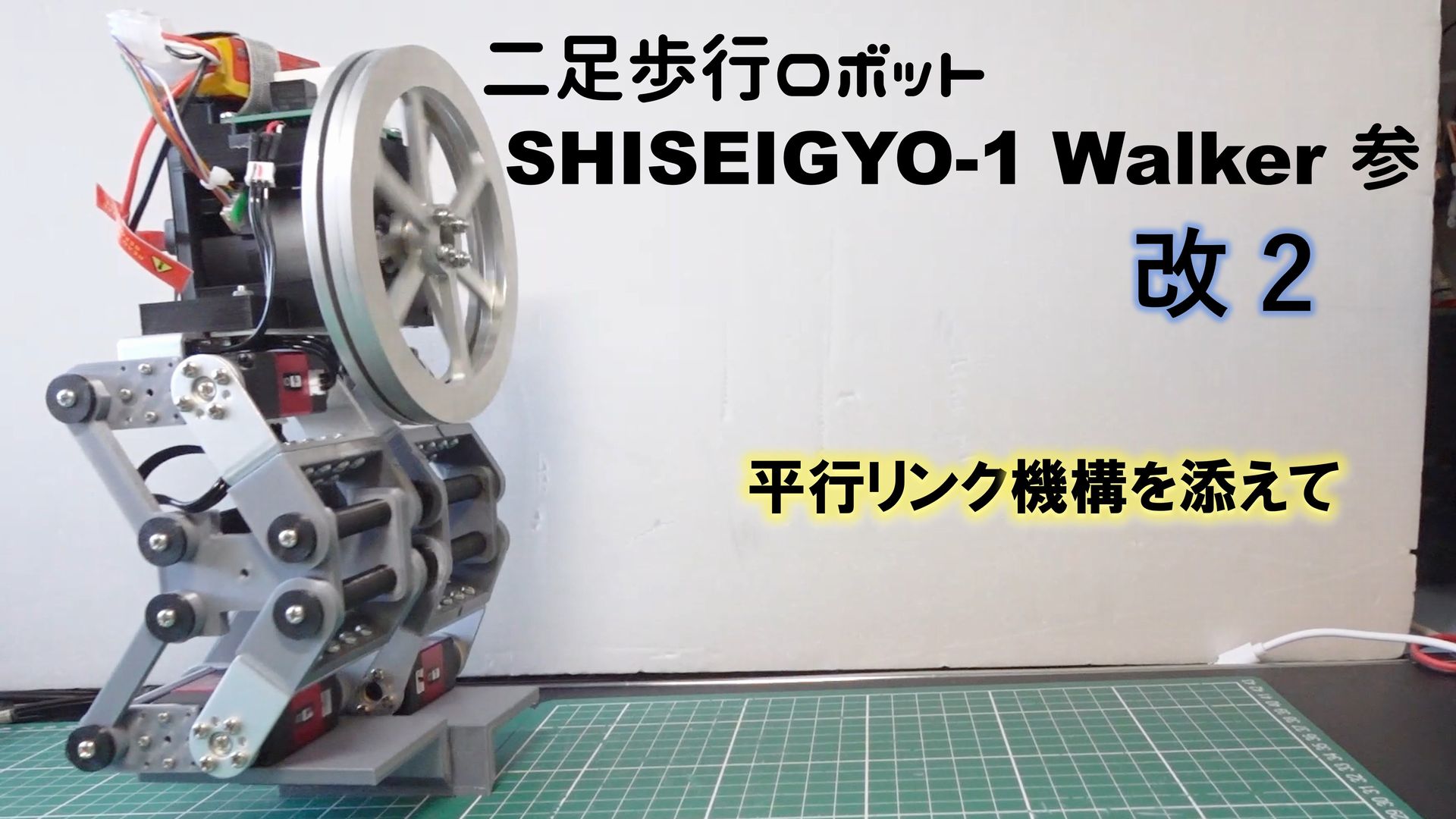
二足歩行ロボット SHISEIGYO-1 Walker 参 改 2
前回はSHISEIGYO-1 Walker 参 の足の構成を再検討し、2足歩行動作を実施しました。 https://homemadegarbage.com/onewalkersan07/ ここでは更に足の構成を再々検討しましたので報告します。 平行リンク機構検討 ...
電子工作 2023.2.22 お父ちゃん ![]()