FEETECH
サーボモータでジャンプに挑戦4
前回はシリアルサーボ STS3032を用いての屈伸倒立振子を製作し、ジャンプ動作の確認を行いました。 https://homemadegarbage.com/bala17// しかし残念ながらジャンプ後の着地は実現できませんでした。 ホイール用モータ 倒立振子の...

サーボモータでジャンプに挑戦3
以前、シリアルサーボ STS3032 で構成した足によるジャンプ動作の確認を行いました。 https://homemadegarbage.com/bala15// ここで、屈伸型の倒立振子でジャンプする際にはホイール用のモータの軽量化も必要そうであることがわかりました。 前回は軽量のギアドモー...
ギアドモータで倒立振子
前回はサーボモータKRS-3301とSTS3032 で2足ジャンプの検討を実施しました。 https://homemadegarbage.com/bala15// [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-33...
サーボモータでジャンプに挑戦2
以前、サーボモータで足を構築してジャンプ動作の確認を実施しました。 https://homemadegarbage.com/bala13// ここでは更に検証しましたので報告します。 KRS-3301 前回は KRS-3301で1脚ロボットを作製してジャンプ動作...
本当にサーボモータで倒立振子
前回はサーボモータを用いて足を構成してジャンプ動作の検討を実施しました。 https://homemadegarbage.com/bala13/ ここではサーボモータでホイールを制御する倒立振子を再び検討します。 https://twitter.com/H0meMadeGarb...
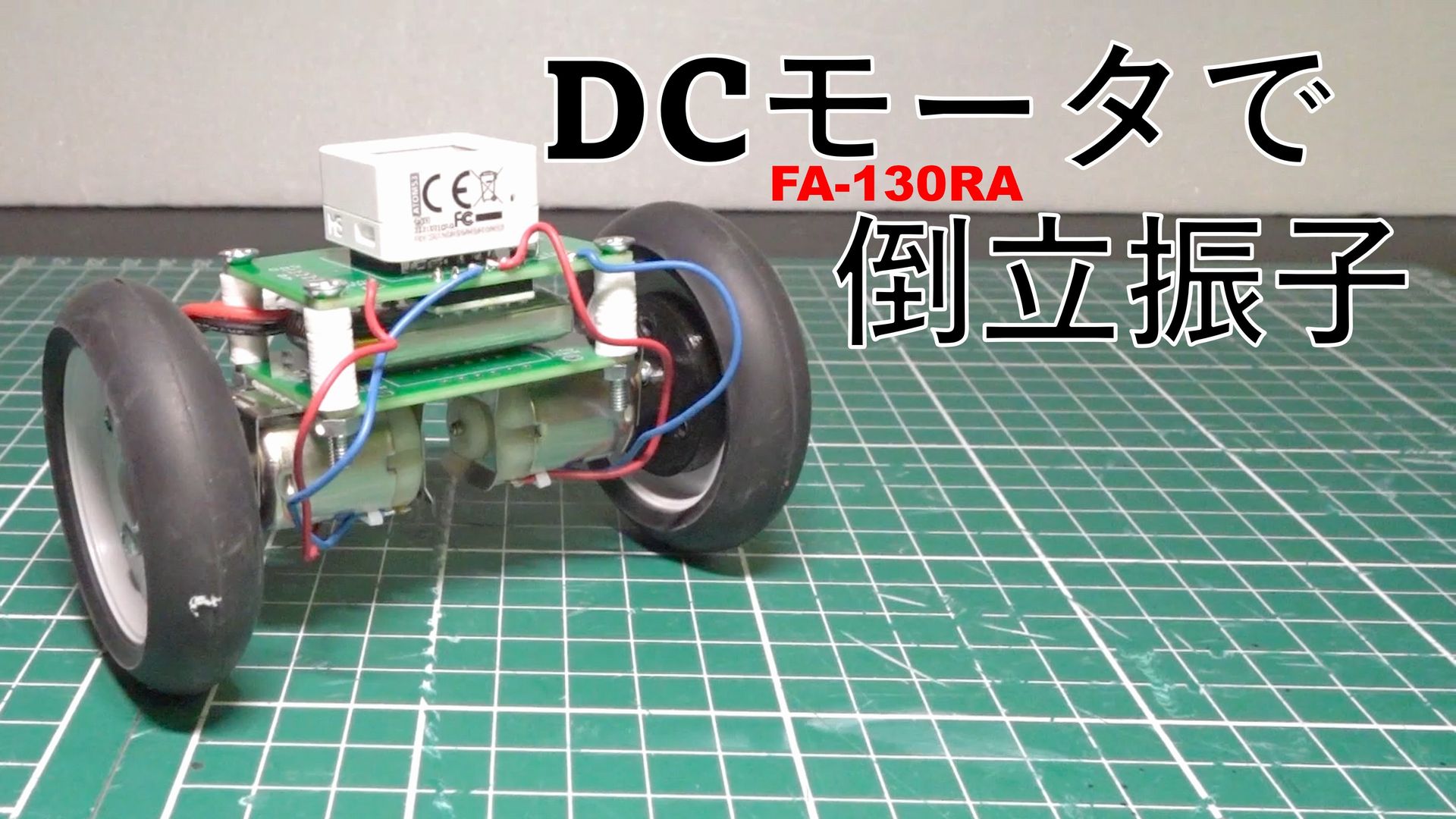
DCモータ FA-130RA で倒立振子作製
前回はDCモータRE-280RA を用いて、屈伸型 倒立振子を製作しました。 https://homemadegarbage.com/bala11/ ここでは更に馴染みの深いモータを用いての倒立振子を検討しました。 マブチモーター FA-130RA 以前製作した...

DCモータ 倒立振子で屈伸
前回はDCモータ RE-280RA を用いて倒立振子を製作しました。 https://homemadegarbage.com/bala10// [amazonjs asin="B07F83J78X" locale="JP" title="モーター RE-280RA"] ここでは膝を設けて屈伸動...

シリアルサーボモータ SCS0009 で倒立振子 完結編
前回はサーボモータSCS0009を用いて屈伸動作する倒立振子の検討を実施しました。 https://homemadegarbage.com/bala07 ここでは前回でた課題の検討を進め サーボモータを用いた倒立振子の神髄に迫りたいと思います。 前...

シリアルサーボモータ SCS0009 で倒立振子 屈伸動作
前回はサーボモータSCS0009を用いて倒立振子を作製し、倒立動作を確認しました。 https://homemadegarbage.com/bala06/ ここではそもそも倒立振子を製作しようと思ったきっかけである屈伸運動の検討をいたします。 https://twitter.c...

シリアルサーボモータ SCS0009 で倒立振子製作
前回はサーボモータLX-224の連続回転モードを用いて倒立振子を製作しました。 https://homemadegarbage.com/bala05 LX-224ではちょっとトルクが大きすぎてオーバースペックのため、別のモータで再挑戦しました。 シリアルサーボモー...
SHISEIGYO-1 Walker Jr. 差動駆動型リンク機構で歩行
前回はSHISEIGYO-1 Walker Jr. の足に平行リンク機構を採用し、ヒザのある歩行を実現いたしました。 https://homemadegarbage.com/onewalkerjr02 ここでは差動駆動型リンク機構を試しましたので報告いたします。 ...
電子工作 2022.9.30 お父ちゃん ![]()
SHISEIGYO-1 Walker Jr. ヒザ爆誕
前回は1個のリアクションホイールでバランスする小型の2足歩行ロボット"SHISEIGYO-1 Walker Jr. "の誕生を報告いたしました。 https://homemadegarbage.com/onewalkerjr01// 今回は足について更に検討してみましたので報告いたします...
電子工作 2022.9.28 お父ちゃん ![]()
SHISEIGYO-1 Walker Jr. 爆誕
これまでリアクションホイールでバランスする2足歩行ロボットを3体ほど製作してきました。 https://homemadegarbage.com/onewalkersan06 この度、4台目の製作を実施いたしましたので報告させていただきます。 コンセプト ...
電子工作 2022.9.25 お父ちゃん ![]()