JAXA
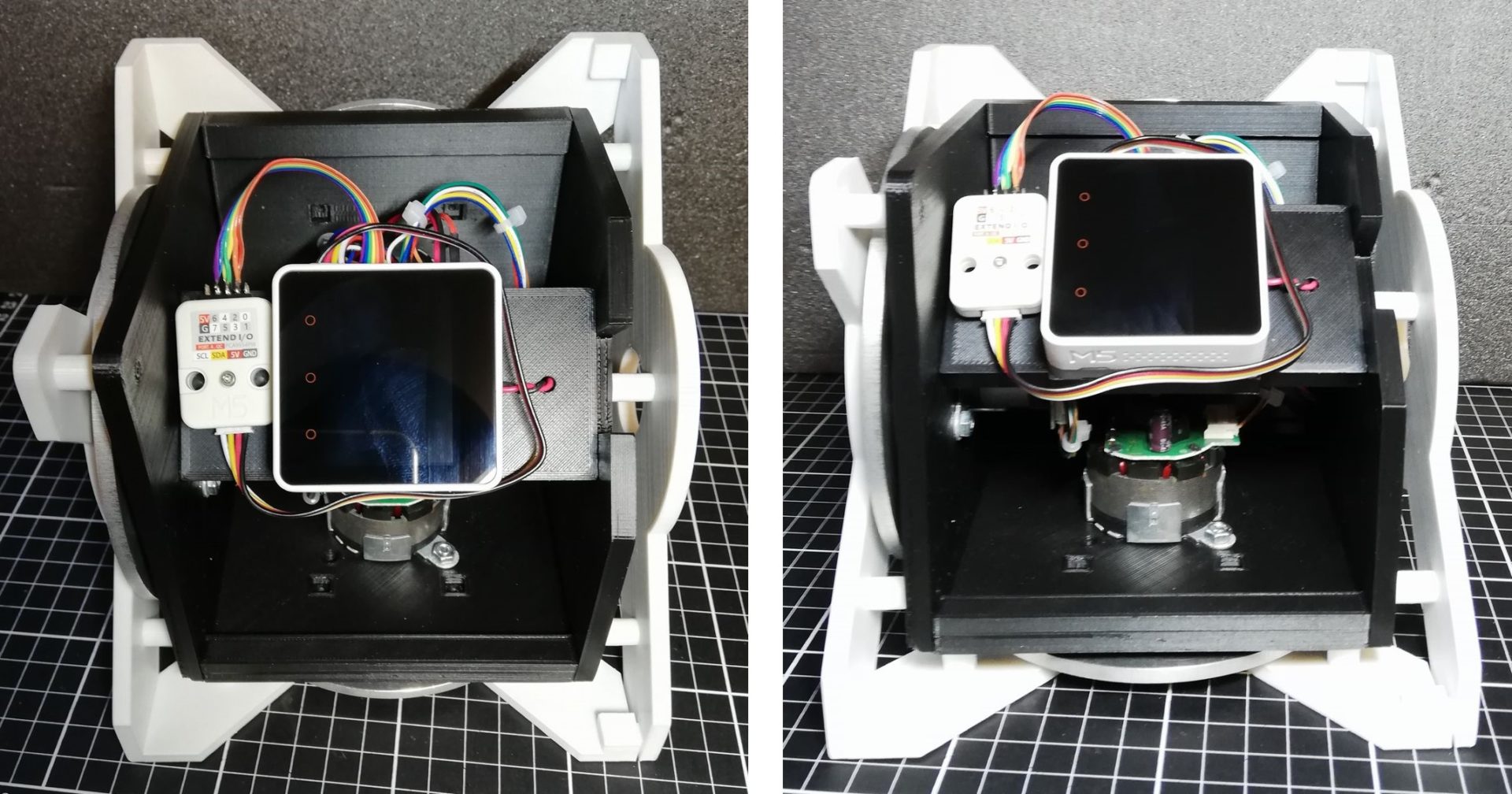
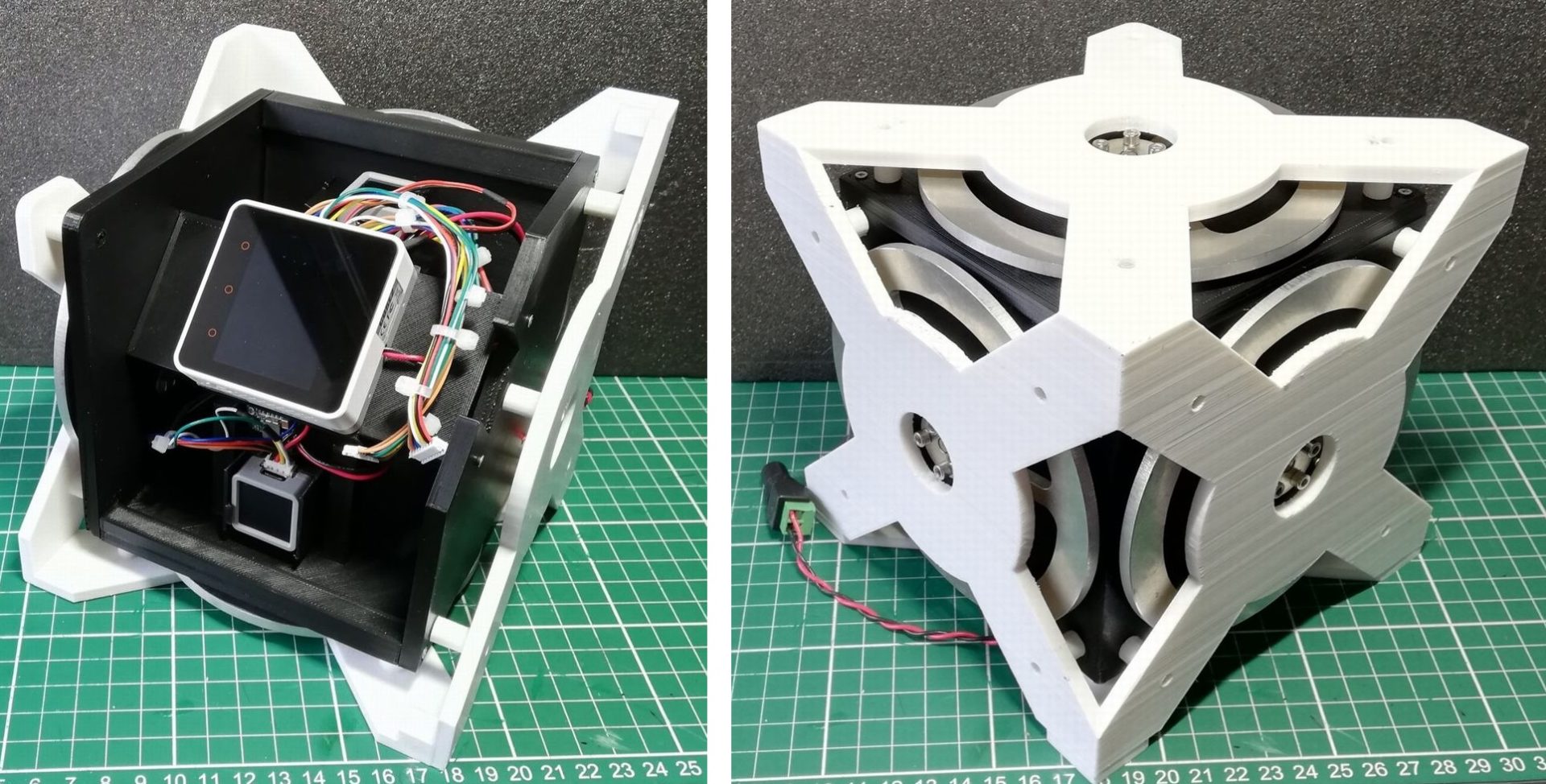
3軸 姿勢制御モジュール SHISEIGYO-3 ver 1.0 完成 ーリアクションホイールへの道29ー
前回は搭載モータをすべて同一のモノにして安定点倒立動作を確認しました。 https://homemadegarbage.com/reactionwheel28 ここではSHISEIGYO-3がひとまず完成いたしましたので報告させていただきます。 安定点倒立 安定...
電子工作 2020.12.30 お父ちゃん ![]()
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
購入したモータの到着待ちのため、ここしばらく SHISEIGYO-3 の開発をお休みしておりました。 ここまでの開発過程は以下にまとめております。 https://homemadegarbage.com/shiseigyo3 SHISEIGYO-3 の開発を再開しましたのでご報告致します...
電子工作 2020.12.26 お父ちゃん ![]()
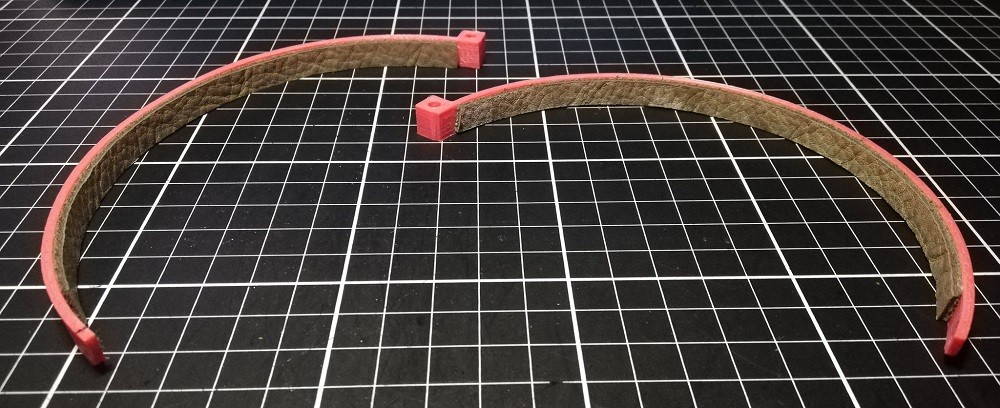
3軸 姿勢制御モジュール SHISEIGYO-3 バンドブレーキ改良 ーリアクションホイールへの道25ー
HomeMadeGarbage Advent Calendar 2020 |12日目 前回はTPUフィラメントによるバンドブレーキを用いて起き上がり点倒立を実現できました。 https://homemadegarbage.com/reactionwheel24 今回はバンドブレーキを改良し、耐...
Advent Calendar / 電子工作 2020.12.12 お父ちゃん ![]()
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
HomeMadeGarbage Advent Calendar 2020 |3日目 前回は倒立メソッドを確立し安定した点倒立実現の可能性を見出すことができました。 https://homemadegarbage.com/reactionwheel23 ここではいよいよ起き上がり点倒立を目指しま...
Advent Calendar / 電子工作 2020.12.3 お父ちゃん ![]()

3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
前回はマイコンにESP32、IMUに6軸モーションセンサMPU6050を採用し、 ブラシレスモータを制御し点倒立調整の準備をいたしました。 https://homemadegarbage.com/reactionwheel22 ここでは安定点倒立を目指し制御方法の検討を実施しましたので報告しま...
電子工作 2020.11.29 お父ちゃん ![]()

3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
以前 M5Stack CORE2単体でブラシレスモータを制御して短時間ではありますが点倒立を実現しました。 https://homemadegarbage.com/reactionwheel19 しかし誤ってM5Stack CORE2を過電圧印可で破壊してしまい、これまでは物理ブ...
電子工作 2020.11.25 お父ちゃん ![]()
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
前回はTPUフィラメントを用いてバンドブレーキを製作し、起き上がり倒立を実現しました。 https://homemadegarbage.com/reactionwheel20 ここでは前回の課題となったモータを3つ筐体に実装した状態での起き上がり辺倒立を目指します。 ...
電子工作 2020.11.22 お父ちゃん ![]()
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
前回はM5Stack Core2 ひとつでモータ3つを制御して長時間ではないですが点倒立動作を実現しました。 https://homemadegarbage.com/reactionwheel19 いよいよ長時間の点倒立を目指そうと思ったのですが、誤ってM5Stack Core2 に過電圧を突っ...
電子工作 2020.11.19 お父ちゃん ![]()
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
前回はSHISEIGYO-3の筐体を構築いたしました。 引き続き点倒立を目指して課題を解決していきます。 https://homemadegarbage.com/reactionwheel18 点倒立 調整 安定した点倒立を目指してパラメータ調整を進めてまいりま...
電子工作 2020.11.16 お父ちゃん ![]()
3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
前回はブラシレスモータ3つを独立に制御することでのSHISEIGYO-3 の点倒立を確認いたしました。 それに伴い 課題も見つかりました。 https://homemadegarbage.com/reactionwheel17 課題 前回の課題をまとめます。...
電子工作 2020.11.11 お父ちゃん ![]()
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
前回はM5Stack Core2を用いてモータ3つを制御してSHISEIGYO-3の点倒立を目指しました。 https://homemadegarbage.com/reactionwheel16 Y軸をモータ1つでX軸をモータ2つで制御して倒立を目指したのですが倒立は達成できず、モータ3つを独立...
電子工作 2020.11.9 お父ちゃん ![]()

3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
以前 1軸の姿勢制御モジュール SHISEIGYO-1 を製作いたしました。 制作レシピは以下で販売しております。 https://shop.homemadegarbage.com/product/shiseigyo-1_recipe/ SHISEIGYO-1に使ったブラシレス...
電子工作 2020.10.22 お父ちゃん ![]()
姿勢制御モジュール SHISEIGYO-1R 爆誕 ーリアクションホイールへの道15ー
前回ついにSHISEIGYO-1が完成いたしました。 ここからは当初の目的であった、以前製作したスマート靴占い装置への実装に向けて歩んでいきたいと思います。 靴を空中に投げた際にその地点の明日の天候データを受信し、リアクションホイールで靴の着地姿勢を制御したいのです。 1回目の リアクショ...
電子工作 2020.8.25 お父ちゃん ![]()
1軸 姿勢制御モジュール SHISEIGYO-1 完成 ーリアクションホイールへの道14ー
これまで歩んできたこの道ですが、ついに1軸 姿勢制御モジュール SHISEIGYO-1 (シセーギョーワン) が完成いたしました! 前回からの改善点とSHISEIGYO-1 の機能説明をさせていただきます。 滑りの改善 SHISEIGYO-1 は筐体を3Dプリンタ...
1軸 姿勢制御モジュール 起き上がり倒立の確立 ーリアクションホイールへの道13ー
前回は物理ブレーキの検証を行いましたが、物理強度が足りず私の心もろともへし折られ断念いたしました。 今回は本筋に戻り、物理ブレーキなしでの起き上がり倒立を目指します。 倒立精度の向上 リアクションホイールへの道11で制御パラメータを理論や物理で説明のつくものだけに...
電子工作 2020.8.22 お父ちゃん ![]()