クローラー倒立ボット MorphCrawlerBot
本記事にはアフィリエイト広告が含まれます。
去年 (2025年) 完成させたクローラー倒立ボット MorphCrawlerBot を先日改修して
去年の連載記事に追記という形で記載したのですが、埋もれてもったいないので改めて粒だてたいと思います。

目次
連載 “ブラシレスモータでサーボ”
ブラシレスモータでサーボという連載の趣旨は題名の通りで、ブラシレスモータを位置制御でサーボモータのように活用して リンク機構ロボ足を動かして大きなジャンプを実現したいという点にございました。
大きなジャンプ実現の過程で、駆動系を足側から胴体側に集約した方が良いということで2重タイミングベルトの検討もなされました。
倒立振子 ジャンプ pic.twitter.com/C2GkD2n1TK
— HomeMadeGarbage (@H0meMadeGarbage) February 4, 2026
2重タイミングベルトの先端側をキャタピラにしたらどうだべか?と思い付きでやったところが
クローラー倒立ボット MorphCrawlerBot 爆誕の起点となります。
思いつきでやってみたけど なんかイケた
なんだかカッコいいからこの方向で調整してみるか pic.twitter.com/ucZMrVCzDo
— HomeMadeGarbage (@H0meMadeGarbage) January 16, 2025
ということで開発の過程で生まれた結果が少し変質したため ブラシレスモータでサーボという連載の枠組みにMorphCrawlerBot が収まらないと判断し本記事を書いている次第です。
私は製作目的や課題を明確にしたうえで、その過程をリアルタイムにX (旧Twitter) にアップして起点起点でブログ記事にまとめるというスタイルを長年とっています。
センスがかなりハイでスタート時点でゴールが割と鮮明に見えるタイプの人間なので (よってハイペースかつハイクオリティ)、今回のように結果が変質することは稀なことなのですが長くやっていればこういうこともたまにはあるのでしょう。
MorphCrawlerBot 改修
MorphCrawlerBot を意気揚々と HomeMadeGarbage the GARAGE 2025 に展示したのですが、、、
HomeMadeGarbage the GARAGE 2025
クローラー倒立ボット MorphCrawlerBot
ちょっと操作が難しい。。。
まだまだ改善の余地がございます#HMGG2025 #HMGG pic.twitter.com/5wJFPDxWWg— HomeMadeGarbage (@H0meMadeGarbage) October 4, 2025
操作が難しいうえにクローラモードと倒立モードのモード移行時に暴走してしまうこともあり
多くの反省がありました。
本 MorphCrawlerBot は基本的にはRoller 485 Lite をトルク(電流)モードで動作させており、クローラモード時はさらに速度制御器を追加して動かしておりました。
2026年一発目は実に操作性の悪いコイツの改修から始めるとする pic.twitter.com/R22WhEl6ev
— HomeMadeGarbage (@H0meMadeGarbage) January 18, 2026
特にクローラモードの 動作がぎこちない。。

2025年 1月のMorphCrawlerBot 誕生から本改修 (2026年 1月)の間にBLDCの速度モードに関する知見が私の中に蓄えられており、実際に速度制御モードによる倒立振子の製作も数を重ねてきました。
今のところ、ブラシレスモータがベクトル制御 (FOC)で適切なゲインの速度制御器が実現できているのであれば 車輪倒立振子は速度モード制御が好ましいという印象を持っています。
そこでここではRoller 485 Lite を速度モードでの動作に変更して安定動作を測りました。
速度モード導入によってクローラモードの移動とモード間の移行がスムーズになりました。
倒立動作はベルトとキャタピラの遊びやキャタの接地点がどうしても離散的になるのでトルクモード時からの大きな改善はありませんでしたが。。
じっと静止ができない pic.twitter.com/B5pfvjIAVA
— HomeMadeGarbage (@H0meMadeGarbage) January 19, 2026
まぁこれなら操作しやすいでしょう。
こうなるとベルトやキャタピラの遊びが凄く気になる pic.twitter.com/b4zv8Q7e6J
— HomeMadeGarbage (@H0meMadeGarbage) January 19, 2026
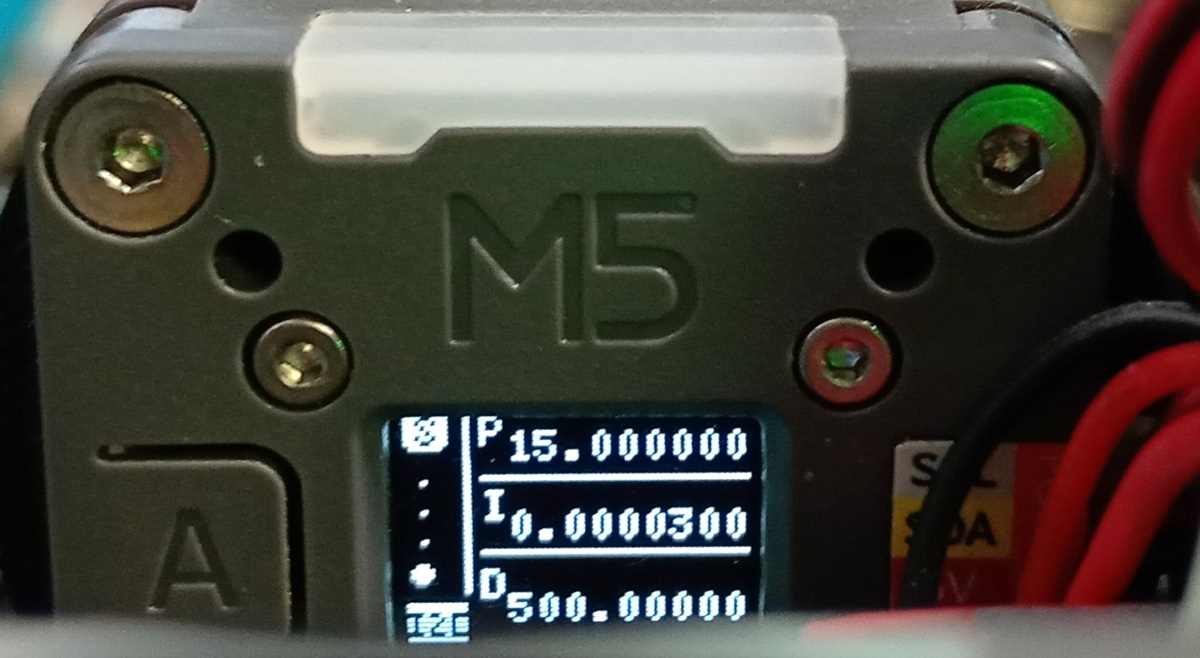
Roller 485 Lite 速度モード時のPID設定は以下のようにしました。
今年のThe GARAGEはこれでリベンジだ!
おわりに
クローラー倒立ボット MorphCrawlerBot の切り取り記事を作成しました。
面白い構成のボットなので今後も改善・改修を実施したいと思います。
リンク足が機械的に弱いので何とかしたいね。
カーボンとかにしたいわ
ではまた