サーボ
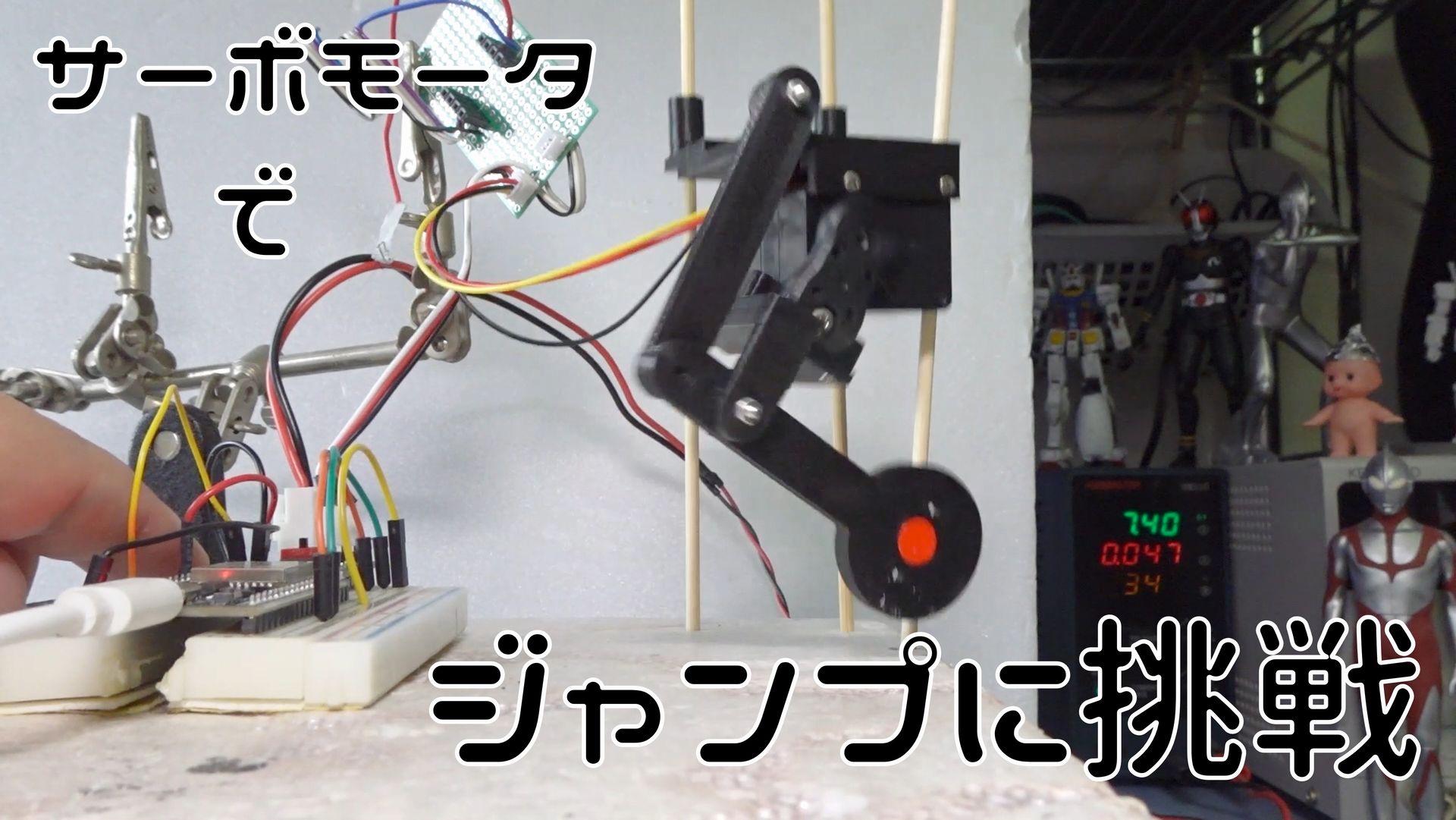
サーボモータでジャンプに挑戦
以前に屈伸タイプの倒立振子を製作しました。 https://homemadegarbage.com/bala11 この倒立振子をジャンプさせてみたくなったので検討します。 ジャンプする倒立振子 こんなすごい倒立振子を見つけました。 https://twitte...
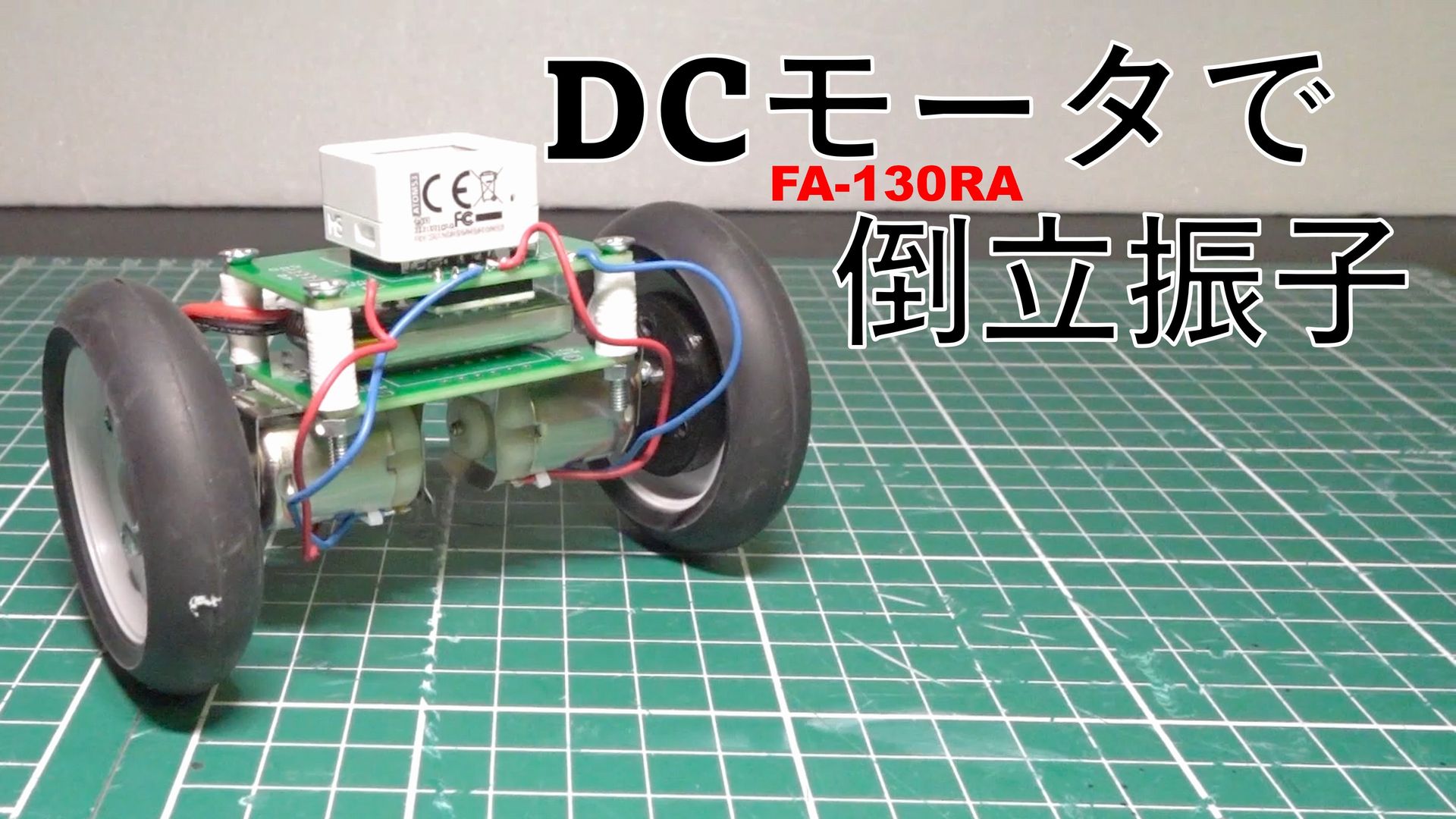
DCモータ FA-130RA で倒立振子作製
前回はDCモータRE-280RA を用いて、屈伸型 倒立振子を製作しました。 https://homemadegarbage.com/bala11/ ここでは更に馴染みの深いモータを用いての倒立振子を検討しました。 マブチモーター FA-130RA 以前製作した...

DCモータ 倒立振子で屈伸
前回はDCモータ RE-280RA を用いて倒立振子を製作しました。 https://homemadegarbage.com/bala10// [amazonjs asin="B07F83J78X" locale="JP" title="モーター RE-280RA"] ここでは膝を設けて屈伸動...

シリアルサーボモータ SCS0009 で倒立振子 完結編
前回はサーボモータSCS0009を用いて屈伸動作する倒立振子の検討を実施しました。 https://homemadegarbage.com/bala07 ここでは前回でた課題の検討を進め サーボモータを用いた倒立振子の神髄に迫りたいと思います。 前...

シリアルサーボモータ SCS0009 で倒立振子 屈伸動作
前回はサーボモータSCS0009を用いて倒立振子を作製し、倒立動作を確認しました。 https://homemadegarbage.com/bala06/ ここではそもそも倒立振子を製作しようと思ったきっかけである屈伸運動の検討をいたします。 https://twitter.c...

シリアルサーボモータ SCS0009 で倒立振子製作
前回はサーボモータLX-224の連続回転モードを用いて倒立振子を製作しました。 https://homemadegarbage.com/bala05 LX-224ではちょっとトルクが大きすぎてオーバースペックのため、別のモータで再挑戦しました。 シリアルサーボモー...
二足歩行ロボット SHISEIGYO-2 Walker 改 の検討2
前回は2軸のフライホイールによるバランスで倒立する2足歩行ロボット “SHISEIGYO-2 Walker 改” の実現に向けて足の製作を実施しました。 https://homemadegarbage.com/walker04/ ここでは製作した足を実装して歩行動作を確認します。 ...
電子工作 2023.3.23 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-2 Walker 改 の検討1
前回は足首にモータを追加して旋回動作を確認しました。 https://homemadegarbage.com/onewalkersan11/ 1軸のホイールによるバランスでは旋回動作が難しいという結論を得ましたので、 ここでは2軸の検討を実施しました。 2軸での...
電子工作 2023.3.20 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-1 Walker 参 改 5
前回はマイコンを削減してESP32単体で制御できるようにして、さらに24V DCDCモジュールの低価格化をはかりました。 https://homemadegarbage.com/onewalkersan10// ここでは足を改良して旋回動作できるようにしましたので報告します。 ...
電子工作 2023.3.13 お父ちゃん ![]()
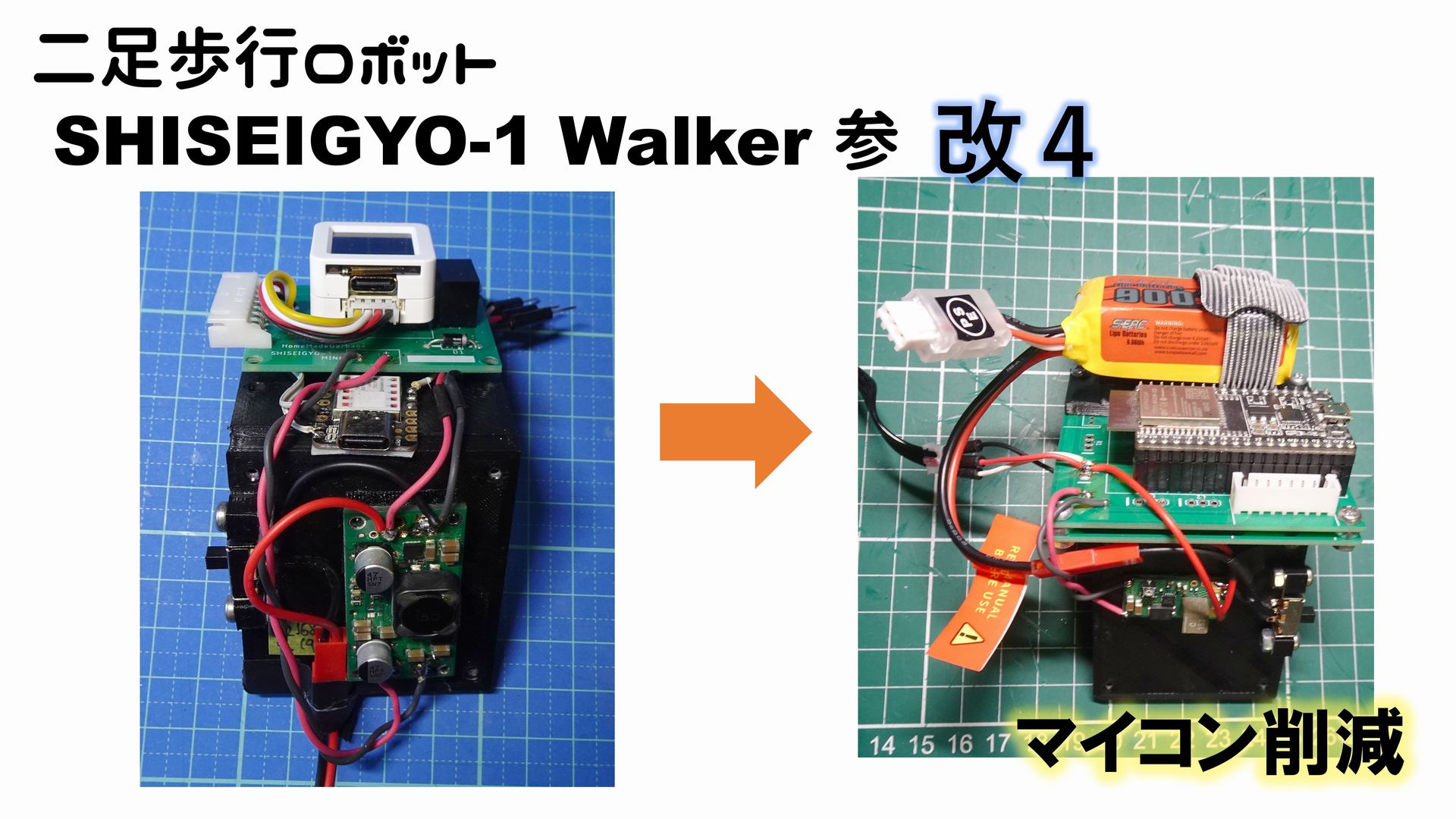
二足歩行ロボット SHISEIGYO-1 Walker 参 改 4
これまでSHISEIGYO-1 Walker 参 の改良版についてはマイコンを2台使用して制御していたが、今回削減をはかったので報告します。 https://homemadegarbage.com/onewalkersan09/ 従来システム構成 以下がこれまでの...
電子工作 2023.3.8 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-1 Walker 改
これまでは SHISEIGYO-1 Walker 参 の足を改良して二足歩行動作を検証してきました。 https://homemadegarbage.com/onewalkersan09 ここでは 初代 SHISEIGYO-1 Walker の足を改良して歩行動作の検証を実施しま...
電子工作 2023.3.7 お父ちゃん ![]()
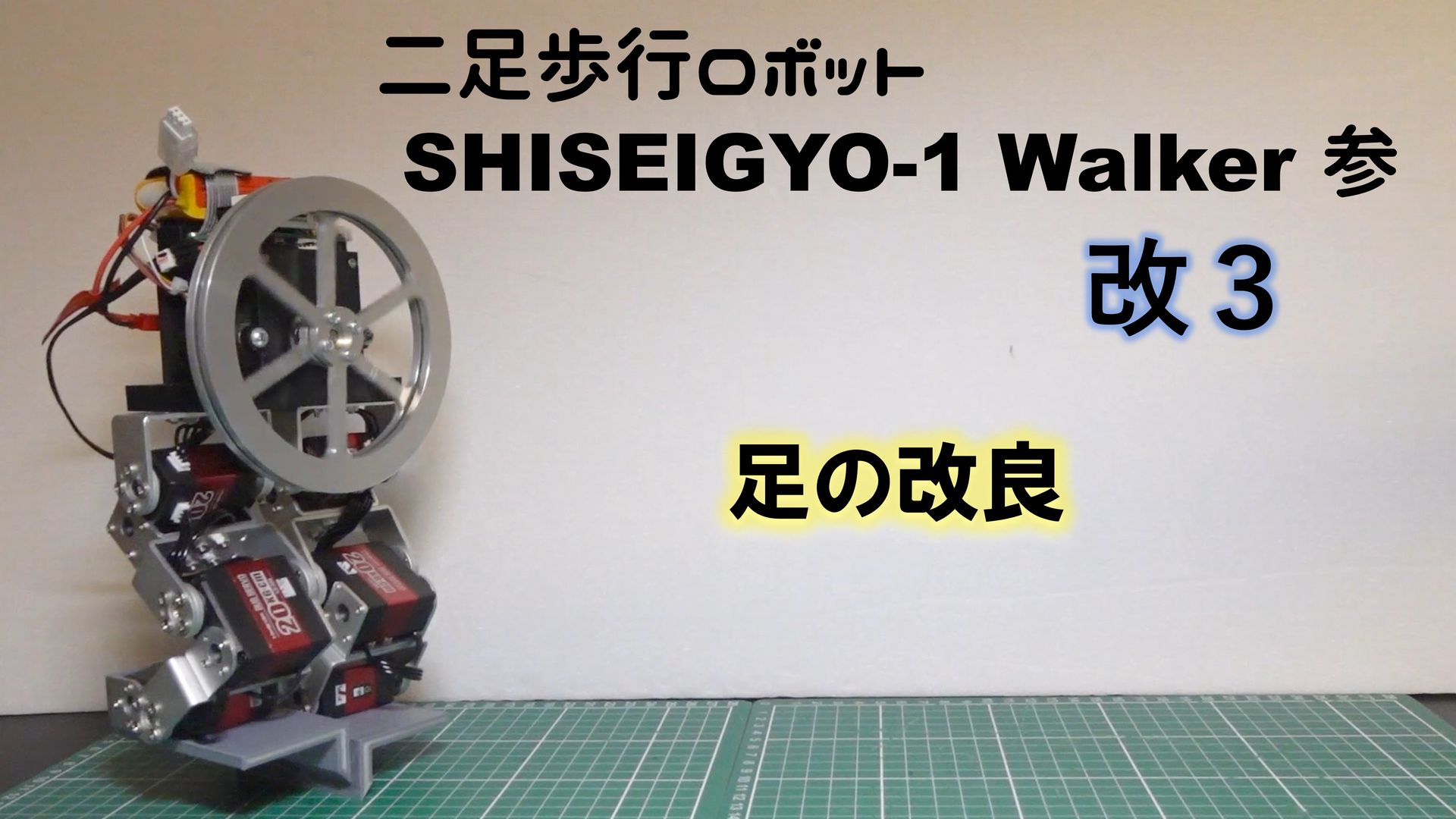
二足歩行ロボット SHISEIGYO-1 Walker 参 改 3
前回はSHISEIGYO-1 Walker 参 改 の足に平行リンク機構を導入しサーボ削減しての歩行動作を確認しました。 https://homemadegarbage.com/onewalkersan08// ここでは、通常の足に戻して再度歩行動作の検証を行いました。 ...
電子工作 2023.2.24 お父ちゃん ![]()
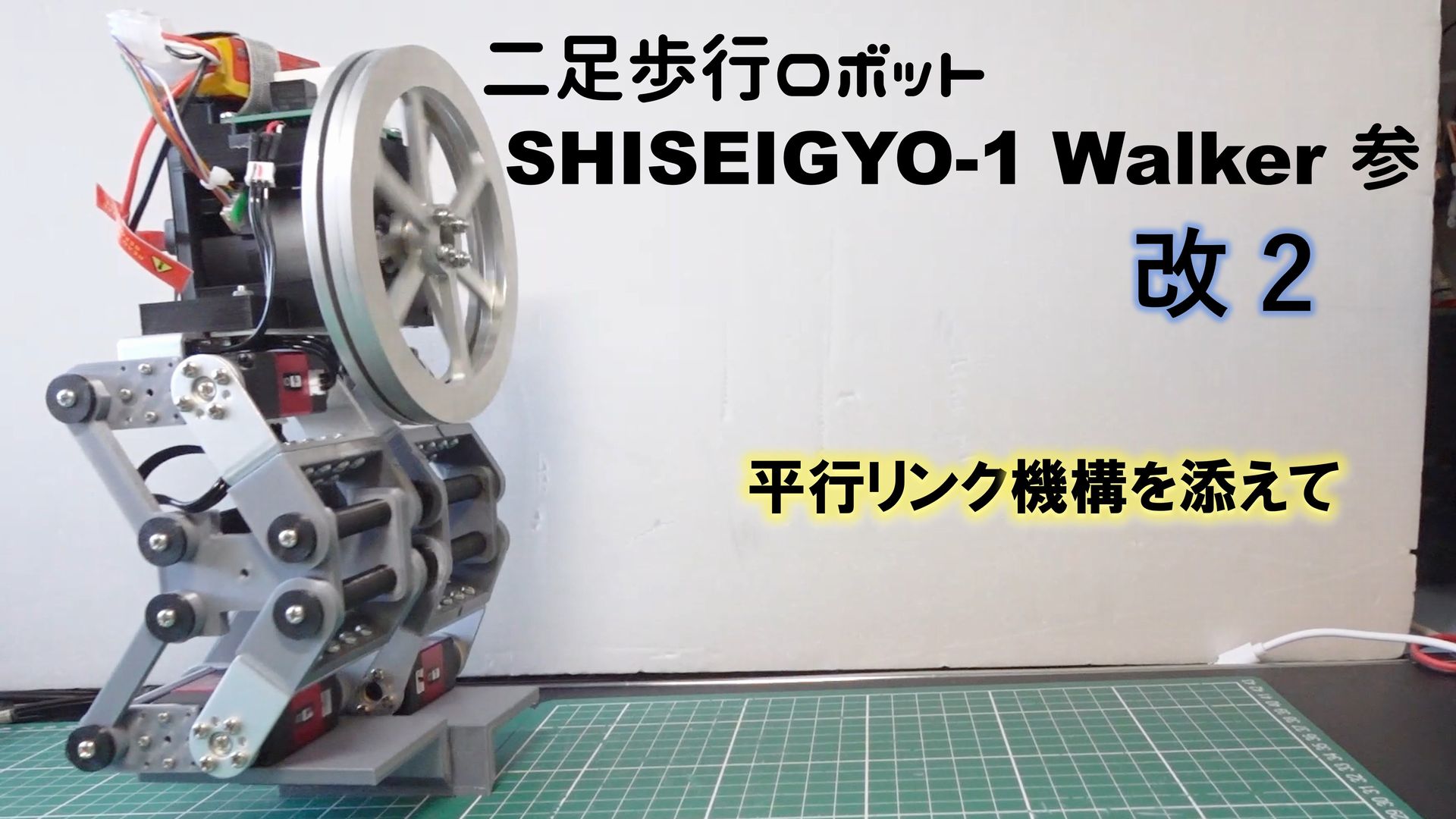
二足歩行ロボット SHISEIGYO-1 Walker 参 改 2
前回はSHISEIGYO-1 Walker 参 の足の構成を再検討し、2足歩行動作を実施しました。 https://homemadegarbage.com/onewalkersan07/ ここでは更に足の構成を再々検討しましたので報告します。 平行リンク機構検討 ...
電子工作 2023.2.22 お父ちゃん ![]()
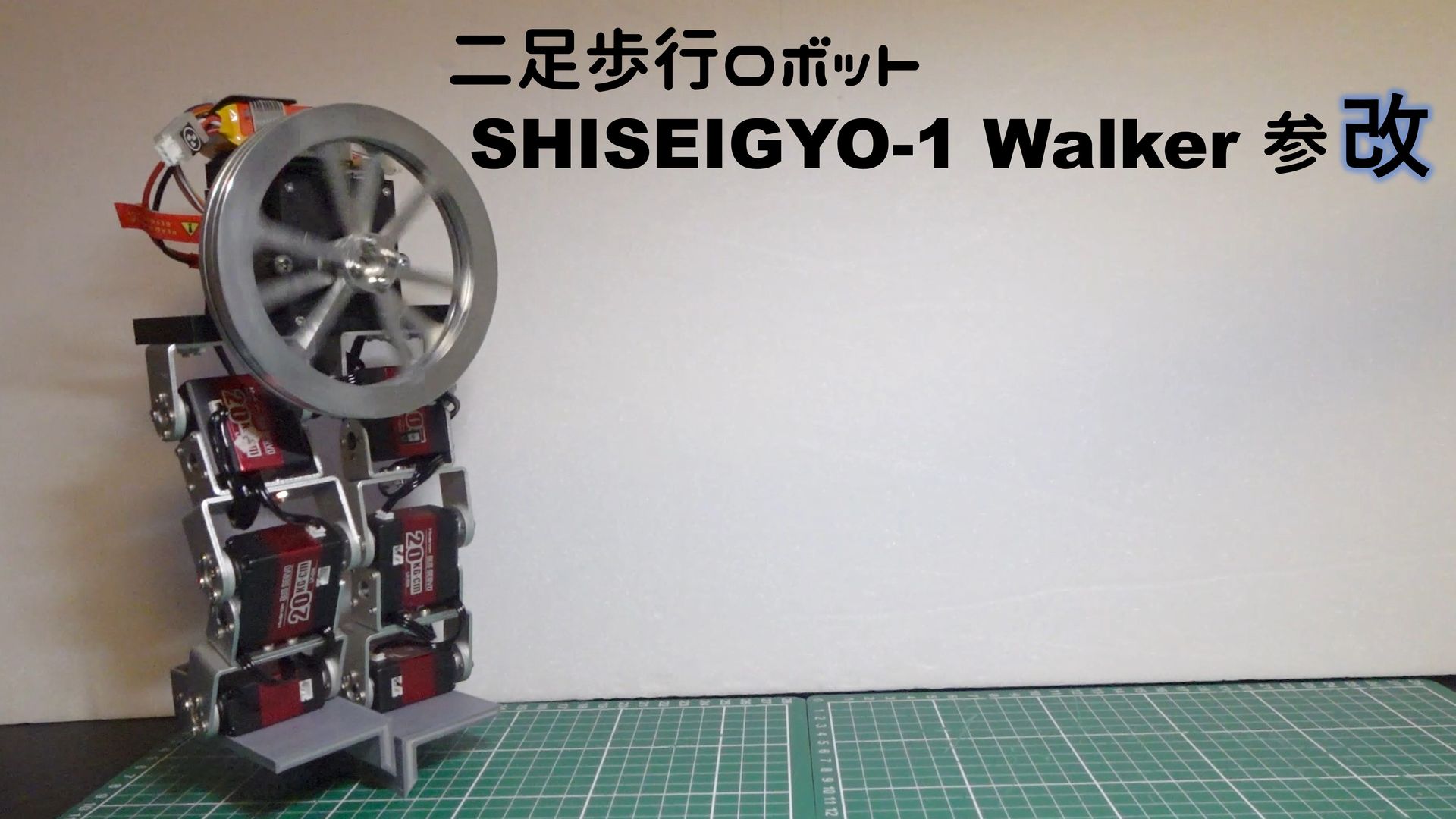
二足歩行ロボット SHISEIGYO-1 Walker 参 改
以前 製作した SHISEIGYO-1 Walker Jr. の足のブレードの距離を開けてみたところ。。。 SHISEIGYO-1 Walker Jr. 足を1枚のブレード状につけてないといけないと思っていたけど 離してもいけるなぁ IDRS (倒立角動的再調整システム) が効いてる...
電子工作 2023.2.17 お父ちゃん ![]()
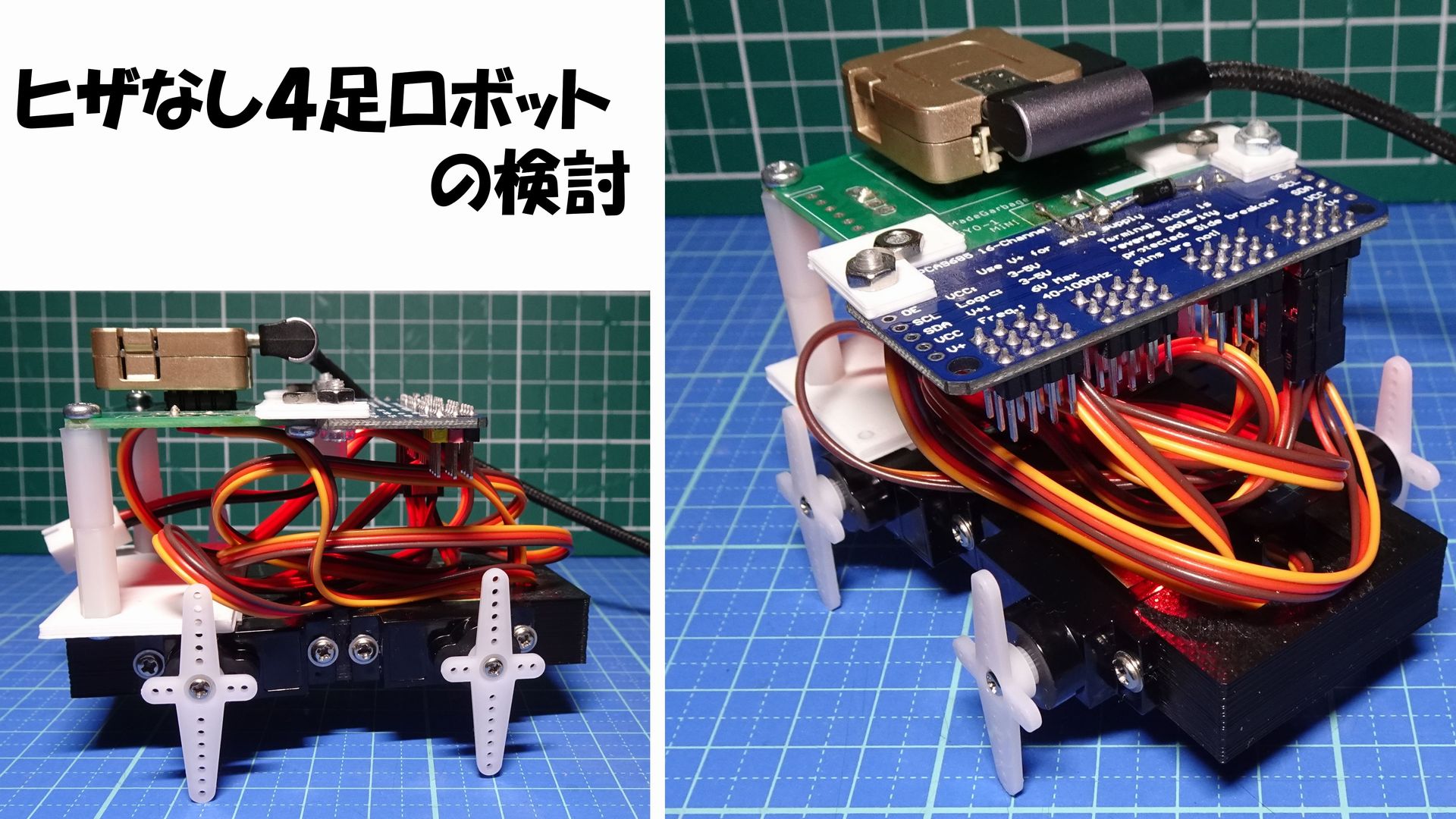
ヒザなし4足ロボットの検討
最近Twitter TL上で、ヒザのないシンプルな棒の足をした4足歩行ロボットをよく見かけます。 pic.twitter.com/SXzrf3KScq — 動物のおもしろ動画 (@nekonyan_dm) February 8, 2023 My robot dog name...
電子工作 2023.2.9 お父ちゃん ![]()