
サーボ
DYNAMIXEL シリアルサーボ XL330 車輪倒立振子の製法
DYNAMIXEL XL330-M077-T を使った2輪の倒立振子ロボットの製法を記載します。 IMU内蔵のマイクロコントローラ Atom Matrix で機体姿勢を検知し、左右の XL330 をカレント制御して倒立します。 Atom Matrix が Wi-Fi アクセスポイントになり、スマ...

PWMマイクロサーボで2足歩行ロボット
前回はPWMマイクロサーボ PTK7465のSim.モデルをこしらえて、2足歩行ロボの歩行動作を検証しました。 https://homemadegarbage.com/servomodel01/ ロボのSim.モデルをもとにAIエージェント Codexで最適動作を探索して実機で検証しました。 ...
電子工作 2026.6.30 お父ちゃん ![]()
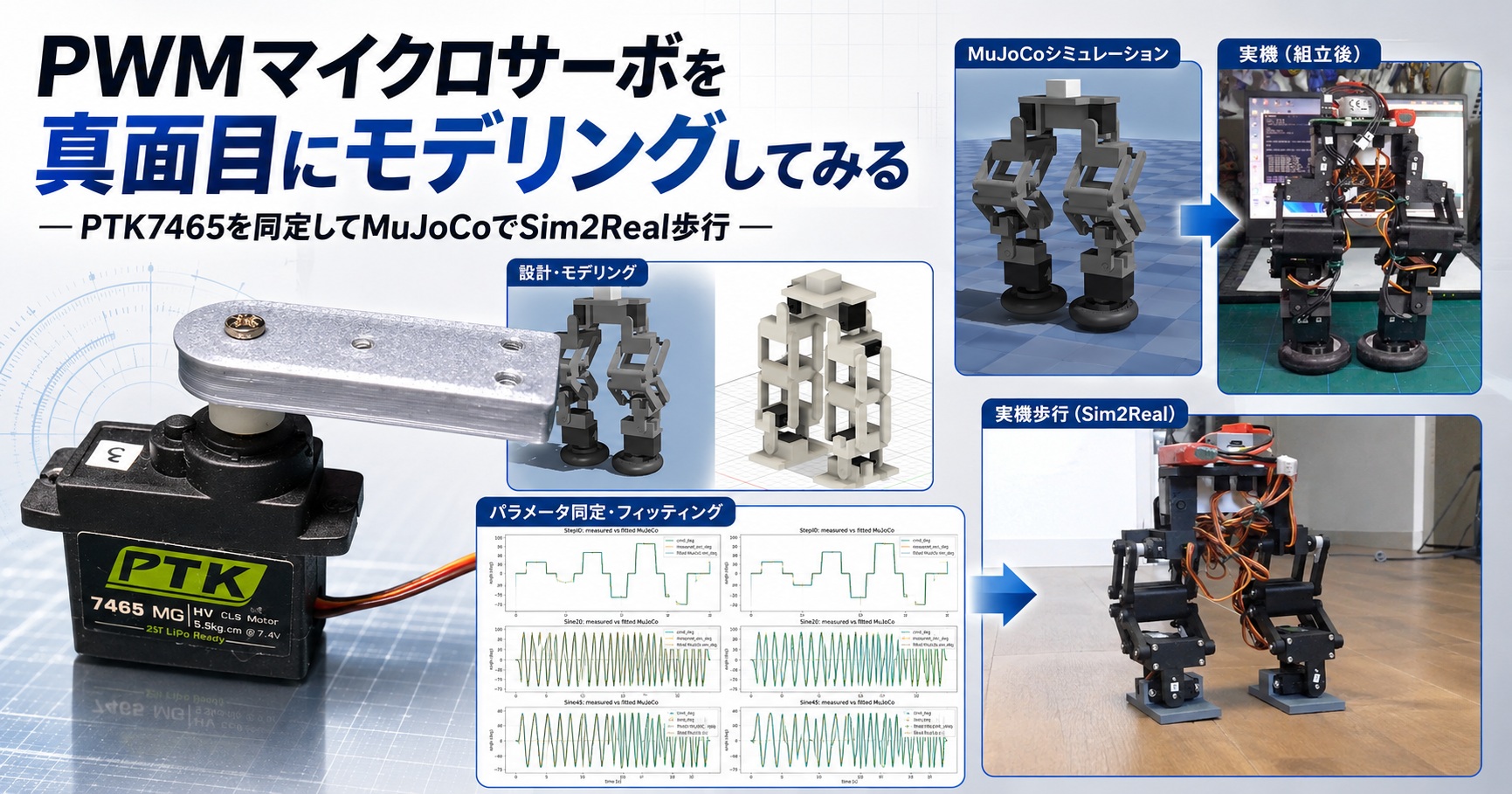
PWMマイクロサーボを真面目にモデリングしてみる — PTK7465を同定してMuJoCoでSim2Real歩行 —
最近はAIエージェント Codexを使って方針や報酬設計丸投げの強化学習にハマっています。 PWMマイクロサーボを用いたロボでも結果が出ており大変に満足しております。 https://homemadegarbage.com/rl13// https://homemadegarbage.com/...
電子工作 2026.6.28 お父ちゃん ![]()

連続回転サーボで車輪倒立振子
今年(2026年)に入ってから倒立振子ばかり作っております。 https://homemadegarbage.com/bala34/ この過程でどんなモータでもどんな構成でも使える倒立メソッドを確立することができました (気のせいかもしれないが)。 モータに関してはDCモータ、サーボモータ、B...

Atomic Motion Base つかってみた
最近は様々な機体構成やモータで車輪倒立振子を作りまくっております。 根本的な制御方式は変えてないので、どんな構成にも対応できるメソッドが確立できたと考え、前回は簡素なモータを用いてメソッドの検証をしました。 https://homemadegarbage.com/bala34/ みごとDCモー...

俺の倒立メソッドを他のモータでも
ここ最近は車輪倒立振子作りまくってるんですよ。 そりゃあもう狂ったように ブラシレスモータやQDDなど各種モータで製作を楽しみました。 直近ではシリアルサーボ XL330 で倒立振子をつくりました。 シリアルサーボで倒立振子 pic.twitter.com/u2HSfDVwRd ...

すごい Wheel-legged ロボに憧れて3
前回は Wheel-legged Robot 直立モード時の歩行動作の検証を実施しました。 https://homemadegarbage.com/bala32// 安定歩行実現のために足を改良して平行リンク機構を導入したので、ここでは再度倒立モードの検証を実施します。 ...

すごい Wheel-legged ロボに憧れて2
前回は Agibot社の X2-N に憧れて自分なりのWheel-legged Robot を製作しました。 倒立モード / 直立モードの移行まで検証いたしました。 https://homemadegarbage.com/bala31/ ここでは直立モード時の歩行動作の検証を実...
すごい Wheel-legged ロボに憧れて1
すごいロボットをネットで見たんです (ここ最近は毎日すごいロボ情報に驚かされていますが。。)。 これめっちゃいい 是非自身でも味わいたい!!https://t.co/YUFlAUaXWs — HomeMadeGarbage (@H0meMadeGarbage) July 6, 20...

DYNAMIXEL シリアルサーボ XL330 で倒立振子2
最近は車輪倒立振子ばかり作っているわけですが、、 こんだけ作るとホイールを前後出来る脚付きタイプと脚なしタイプのそれぞれで制御メソッドを自分の中でガッチリと構築できるものです。 ホイールモータに関してはFOC制御によるブラシレスモータ 一択だと思っているのですが、少し立ち戻ってサーボや...

シン SHISEIGYO-1 Walker の開発2
前回は PWMマイクロサーボと低価格ブラシレスモータによるリアクションホイールバランス2足歩行ロボット (シン SHISEIGYO-1 Walker) の製作を開始いたしました。 https://homemadegarbage.com/onewalker08/ ↓低価格なのに高精...
電子工作 2025.11.26 お父ちゃん ![]()

シン SHISEIGYO-1 Walker の開発1
先日大変素晴らしいPWMマイクロサーボを見つけまして 低価格ですがトルク・精度申し分なく 4脚ロボットを作ったりしました。バク転もできます。 https://homemadegarbage.com/robot-ptk7465/ もうサーボモータを使用した工作...
電子工作 2025.11.23 お父ちゃん ![]()
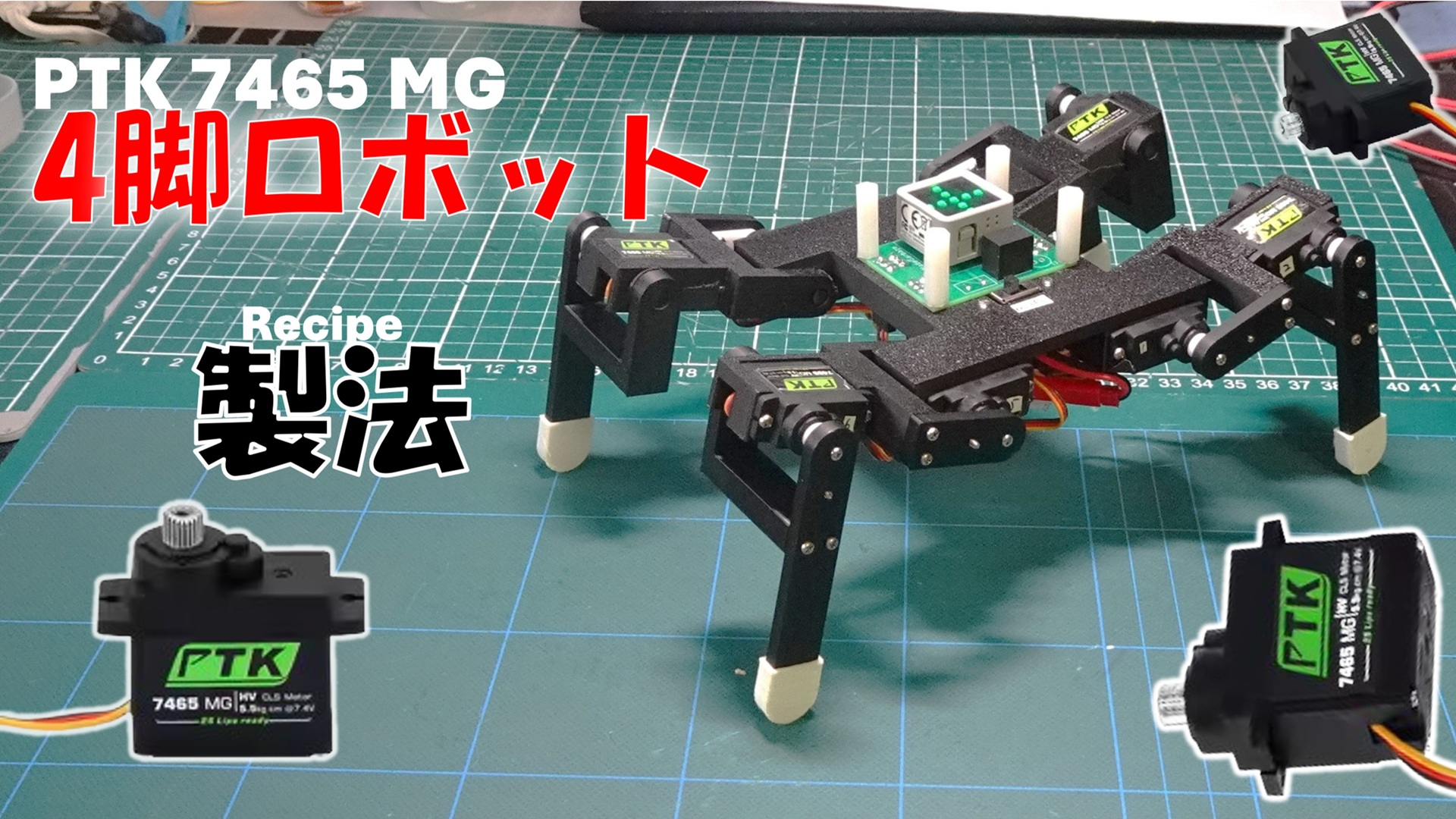
PTK 7465 MG を用いた4脚ロボットの製法
はじめに 以前、低価格なのに高トルクで高精度のPWMサーボ PTK 7465 MG を入手して大騒ぎさせていただきました。 https://homemadegarbage.com/ptk7465-01/ この時に検証で製作した4脚ロボットを作ってみたいという声をチラホラいただい...
電子工作 2025.11.14 お父ちゃん ![]()

低価格のPWMサーボのスペックがゲキ高だった ー PTK 7465 MG ー
日課のアリエクネットサーフィンをかましていたところ、すごいサーボモータを発見してしまいました。 これマジか? 凄いマイクロサーボ見つけたんだけど 6Vで 0.092sec/60deg、4.5kg・cmだって 本当!?STS3032に匹敵するぞ これ本当なら余裕でバク転4脚ロボできる...
電子工作 2025.9.20 お父ちゃん ![]()

ブラシレスモータで2足歩行ロボット12 ー はじめての金属加工 ー
前回はブラシレスモータを用いた2足歩行ロボットの動作検討を実施して、現行の3自由度の足としては満足いく結果を得ることができました。 https://homemadegarbage.com/robottrip13// 家のドロイドや。かわええやろ ...
電子工作 2025.4.11 お父ちゃん ![]()