モーションコントローラ検討3 ー二足歩行ロボットへの道8ー
本記事にはアフィリエイト広告が含まれます。
前回はAIカメラHuskyLensを用いて画像認識でロボットを遠隔操作する可能性を確かめました。
ここではコントローラによる操作に戻ってモーション検討実施いたしました。

目次
歩行動作
歩行動作をスムーズに実施するためにコントローラをツールクリップに固定しました。
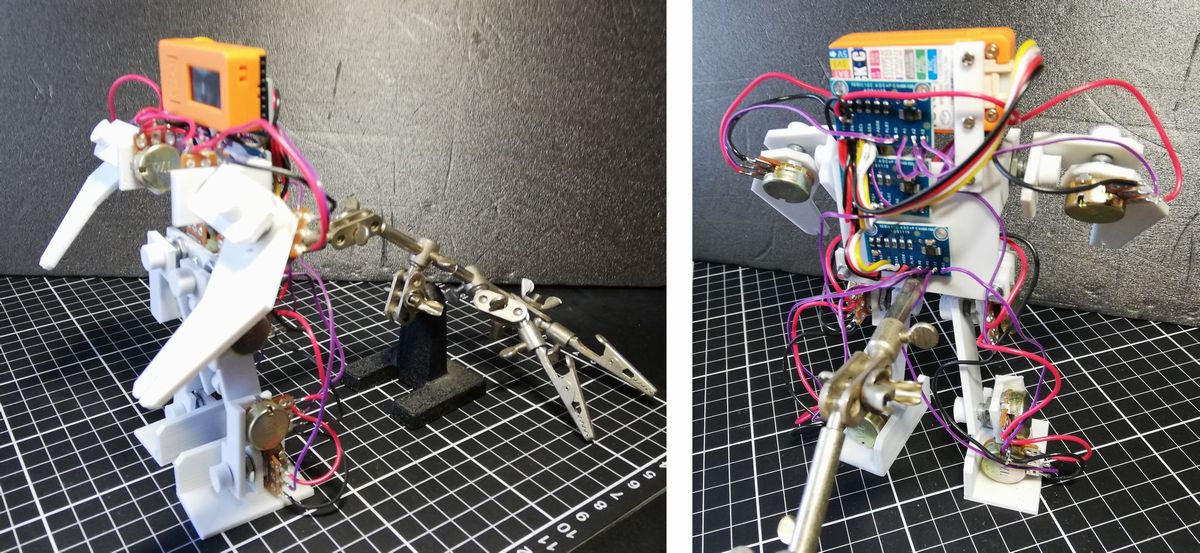
動作
意外と荒く動かしても何となく歩けています。
足底をもっと重たくすればいいような気がしています。
バッテリ駆動
これまでロボットは5V ACアダプタで給電しておりましたが、バッテリを用いて配線をなくして自由度向上を目指しました。
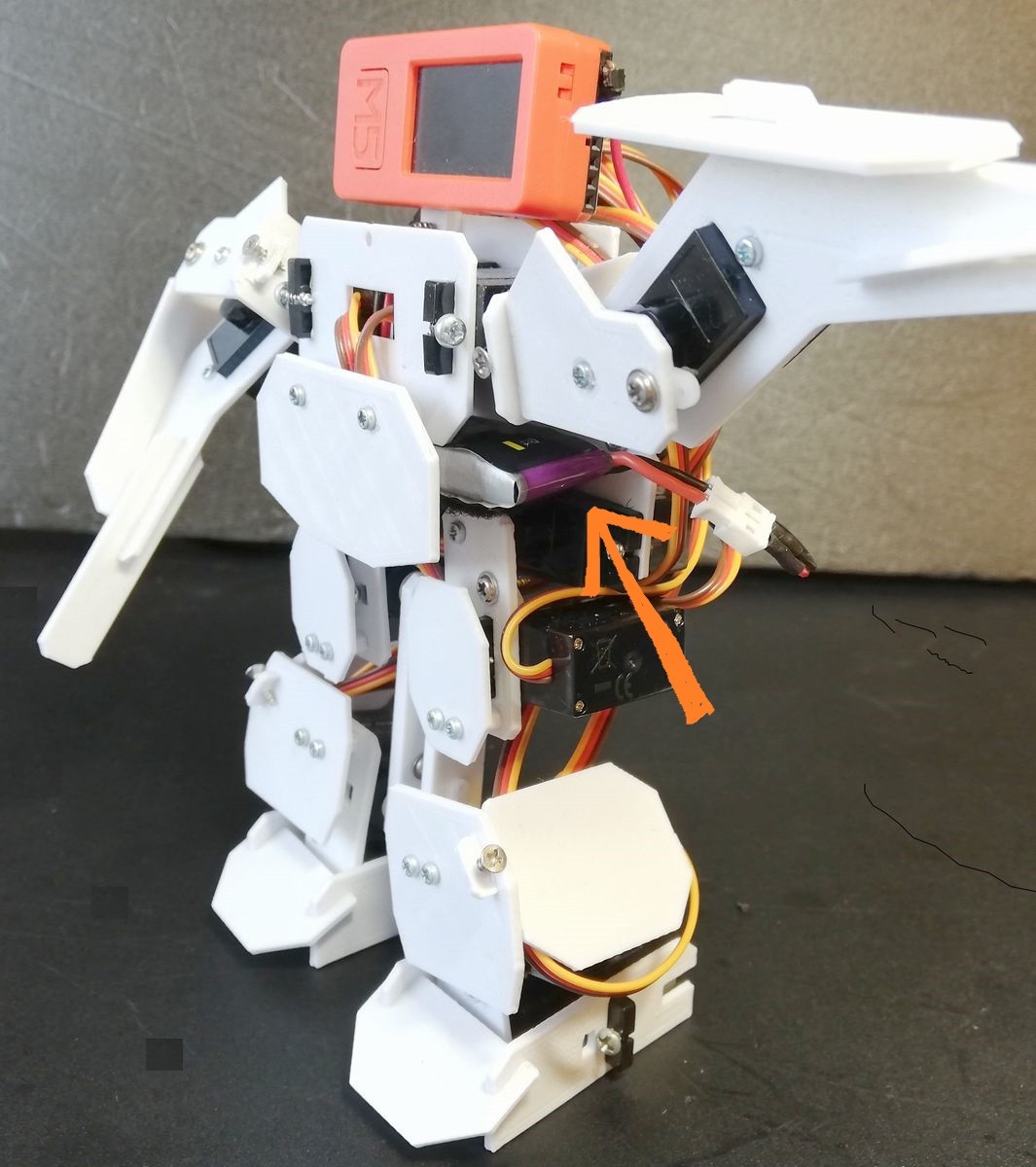
サーボドライバの電源にLiPoバッテリを接続しました。
バッテリ駆動にしてアンプラグド
これでどこにでも連れていける#とってもロボットくん pic.twitter.com/mQ3LMZxuTG— HomeMadeGarbage (@H0meMadeGarbage) July 28, 2021
おわりに
ここでは歩行動作とロボットのバッテリ駆動の検討を実施いたしました。
バッテリ駆動の実現によってどこでもロボットを楽しめるようになったので
更に精進したいと思います。
それでは次の道でお会いしましょう!
この投稿をInstagramで見る