ブラシレスモータでサーボ9 - ジャンプ再挑戦 –
本記事にはアフィリエイト広告が含まれます。
前回は高いジャンプ動作実現を目指して、駆動部品を全て胴体に移動して足を軽くするべくタイミングベルトとボールベアリングの検証を実施しました。
ここでは関節用ブラシレスモータのトルクの検証を実施します。

目次
トルク検証
前回、タイミングベルトと滑車のボールベアリング検証のために固定していた関節の片側をブラシレスモータに戻して動作確認しました。
やはり苦しい… pic.twitter.com/4BeXZWnzSH
— HomeMadeGarbage (@H0meMadeGarbage) January 14, 2025
ホイール駆動用のブラシレスモータモジュール Roller485 Lite を移動して動体が重たくなったため、トルクが十分でなく関節の屈伸運動がちょっと苦しそうです。
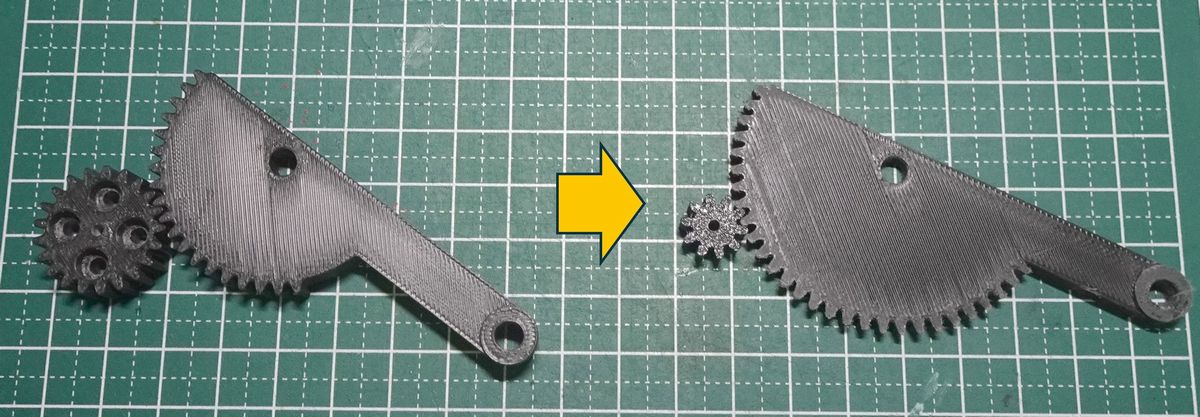
関節用ブラシレスモータのトルクを上げるために関節のギアの減速比を以下のように変更しました。
21:45 (2.14) → 10:56 (5.6)
かなり元気になりました。
なんだかイケそうな気がする
他方の足にも展開いたしましょう。 pic.twitter.com/NSg5LlAJSk
— HomeMadeGarbage (@H0meMadeGarbage) January 14, 2025
ジャンプ再挑戦
減速比の修正を両足に展開してジャンプ動作を確認しました。
ウホッ!!
ピッチ軸バランス悪いからタイヤ位置調整だな。。。 pic.twitter.com/6RbUKxtB3w— HomeMadeGarbage (@H0meMadeGarbage) January 14, 2025
機体前後のバランスが悪く転んでいますが、ジャンプは立派にできるようになりました!
関節用ブラシレスモータのトルク向上がうまくいったと言えます。
足長さを調整してタイヤ位置を若干後ろに下げて前後バランスを整えました。
ピョンといい感じにジャンプできています。
おわりに
高いジャンプ動作を目指し、駆動部品を全て胴体に実装して足を軽くするために
前回はタイミングベルトとボールベアリングによるホイール駆動の検証を
今回は足関節用のブラシレスモータのトルク検証を実施しました。
足が軽くなったことで、足を伸ばした際に胴体が加速し浮いて 足を戻しても跳躍が保持されるようになりました。
— HomeMadeGarbage (@H0meMadeGarbage) January 15, 2025
跳躍以外の動作も含めてこの倒立振子ロボットの仕上げを施して完成を目指したいと思います。
いよいよラストスパート!
またお会いいたしましょう。