
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
本記事にはアフィリエイト広告が含まれます。
前回は山形大学の開発した球状歯車を参考に2軸 姿勢制御モジュール SHISEIGYO-2 のホイールへの応用を試しました。
目次
球体ホイールの検討
ホイールを球状にすることによって、移動が非常に安定することが前回わかりました。
しかし、球状歯車を自由自在に動かして様々な方向に移動させるには
機構が複雑になりそうで技術的にも難しいです。
どうしてもSHISEIGYO-2 Go を自由自在に動かしたいのでホイールを再検討いたしました。
ORENICS
半球にそれぞれ歯車の溝をつくり、独立して動く機構を考案いたしました。
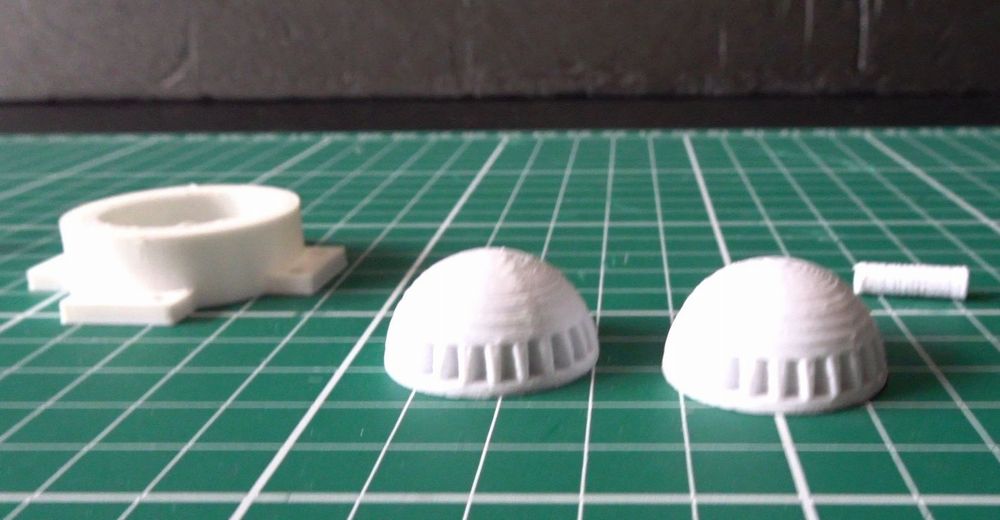
2つの360°回転サーボでそれぞれ回します。
この投稿をInstagramで見る
動作
まだまだ自由自在というわけにはいきませんが、方向転換とカーブ走行が実現できました。
おわりに
ここでは球体ホイールを検討、製作し動作確認を実施いたしました。
球体を構成するそれぞれの半球の接地精度や制御方法を精査して、縦横無尽に走り回るSHISEIGYO-2 Go を目指したい思います。
それでは次の道でお会いしましょう!
追記
調整 (2021/6/26)
走行調整中
なかなかいい感じになってきました。
だいぶSHISEIGYO-2 Go の Goたる部分がGoしてきた。
俺の2連休は始まったばかりだ。#リアクションホイールへの道 #電子工作#ReactionWheel @blynk_app #M5Stack #M5StackCORE2 pic.twitter.com/rT8YGeophM— HomeMadeGarbage (@H0meMadeGarbage) June 25, 2021
次の記事
関連記事
 一脚 屈伸ロボ 爆誕
一脚 屈伸ロボ 爆誕
 SHISEIGYO-2 Go ホイール検討 球状歯車を味見 ーリアクションホイールへの道40ー
SHISEIGYO-2 Go ホイール検討 球状歯車を味見 ーリアクションホイールへの道40ー
 特殊球体ホイール バランスロボット SHISEIGYO-2 Go 弐
特殊球体ホイール バランスロボット SHISEIGYO-2 Go 弐
 2軸 姿勢制御モジュール SHISEIGYO-CORE2 爆誕 ーリアクションホイールへの道30ー
2軸 姿勢制御モジュール SHISEIGYO-CORE2 爆誕 ーリアクションホイールへの道30ー
 2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
 SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
 SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー