M5stack
RollerCAN で おかもち
HomeMadeGarbage Advent Calendar 2024 |1日目 時折 "あー おかもち もちてー" と思うことがあり、これまでもサーボモータやブラシレスモータで おかもちを製作してきました。 https://homemadegarbage.com/okamochi/ htt...
Advent Calendar / 電子工作 2024.12.1 お父ちゃん ![]()
RollerCAN でバーサライタ
RollerCAN をM5Stackオフィシャルショップで買ってみました。 [bc url="https://docs.m5stack.com/ja/unit/Unit-RollerCAN"] 以前にRoller485 Liteを購入して様々な作例を紹介してきました。 http...
電子工作 2024.11.28 お父ちゃん ![]()
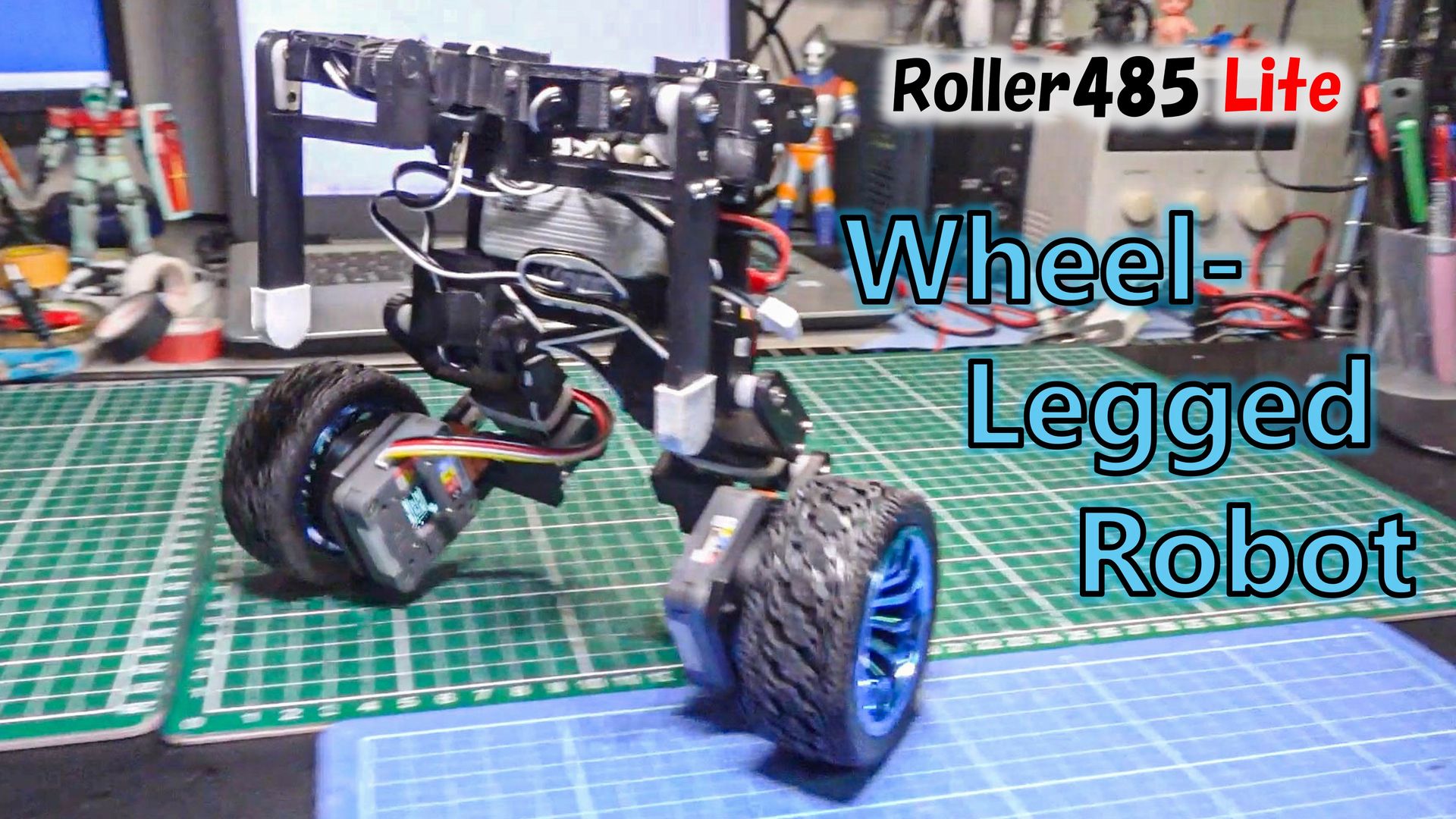
Roller485 で Wheel-Legged Robot
Roller485 Lite ユニットを用いて Wheel-Legged Robot を製作してみました。 以下の動画のようにスクッと立つ動作を実現してみたいと思っていて 高速応答可能なブラシレスモータ搭載のRoller485 の使用を検討してみます。 Swiss-Mi...
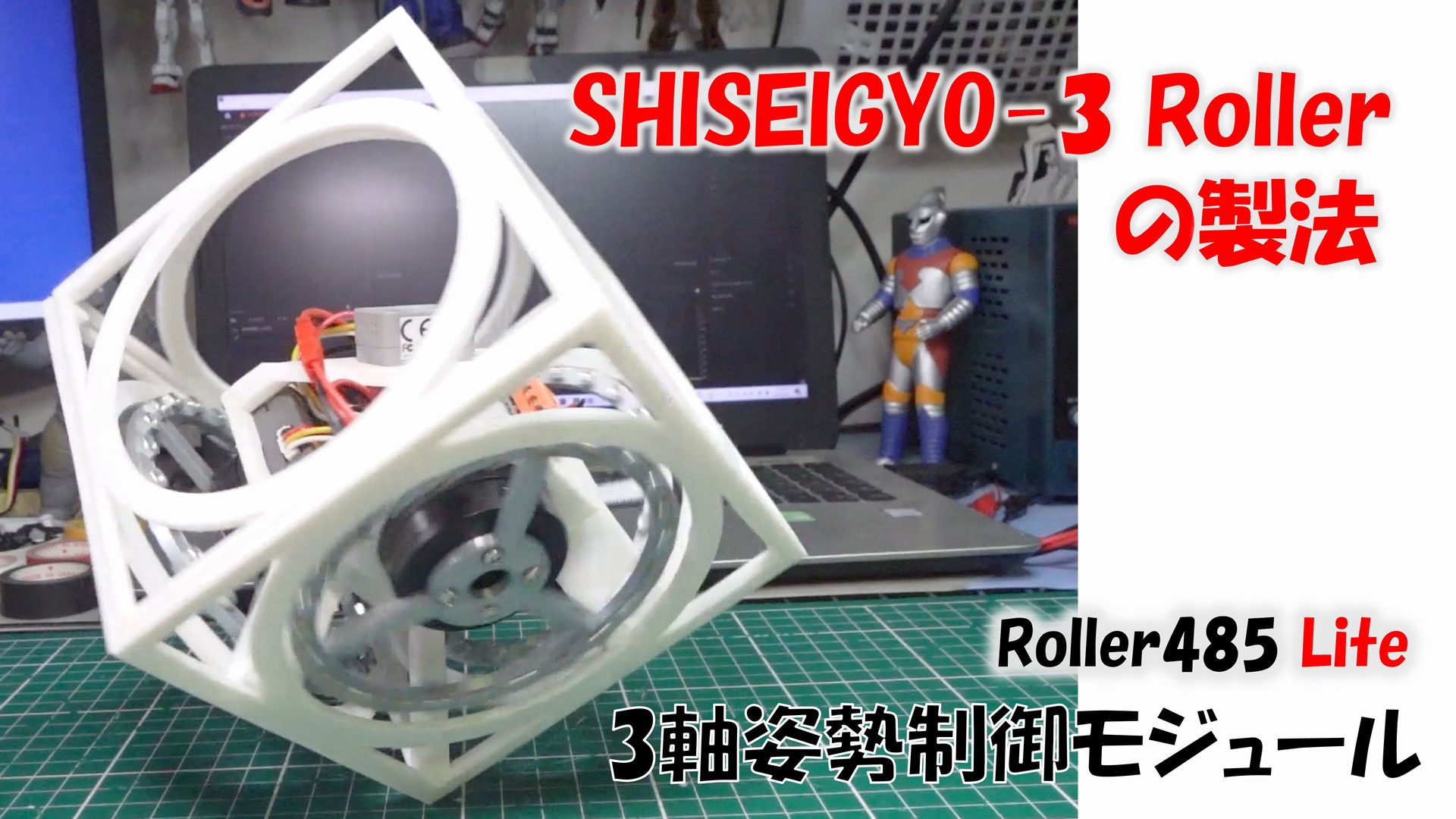
3軸姿勢制御モジュール SHISEIGYO-3 Roller の製法
はじめに SHISEIGYO-3 Roller はRoller485 Lite ユニットを用いた3軸姿勢制御モジュールです。 コントローラとしてIMU内蔵のATOM Matrixを使用し点倒立を実現します。 マイコン内蔵のRoller485 Lite ユニットを用いることで構成が非常にシン...
電子工作 2024.10.22 お父ちゃん ![]()

3軸姿勢制御モジュール SHISEIGYO-3 DC の製法
はじめに SHISEIGYO-3 DC は小型ドローンに使用されるコアレスモータを採用した 1辺82mmの小型3軸姿勢制御モジュールです。コントローラとしてIMU内蔵のATOMS3を使用し点倒立を実現します。 SHISEIGYO-3 DC coming soon... pic.twitte...
電子工作 2024.10.21 お父ちゃん ![]()
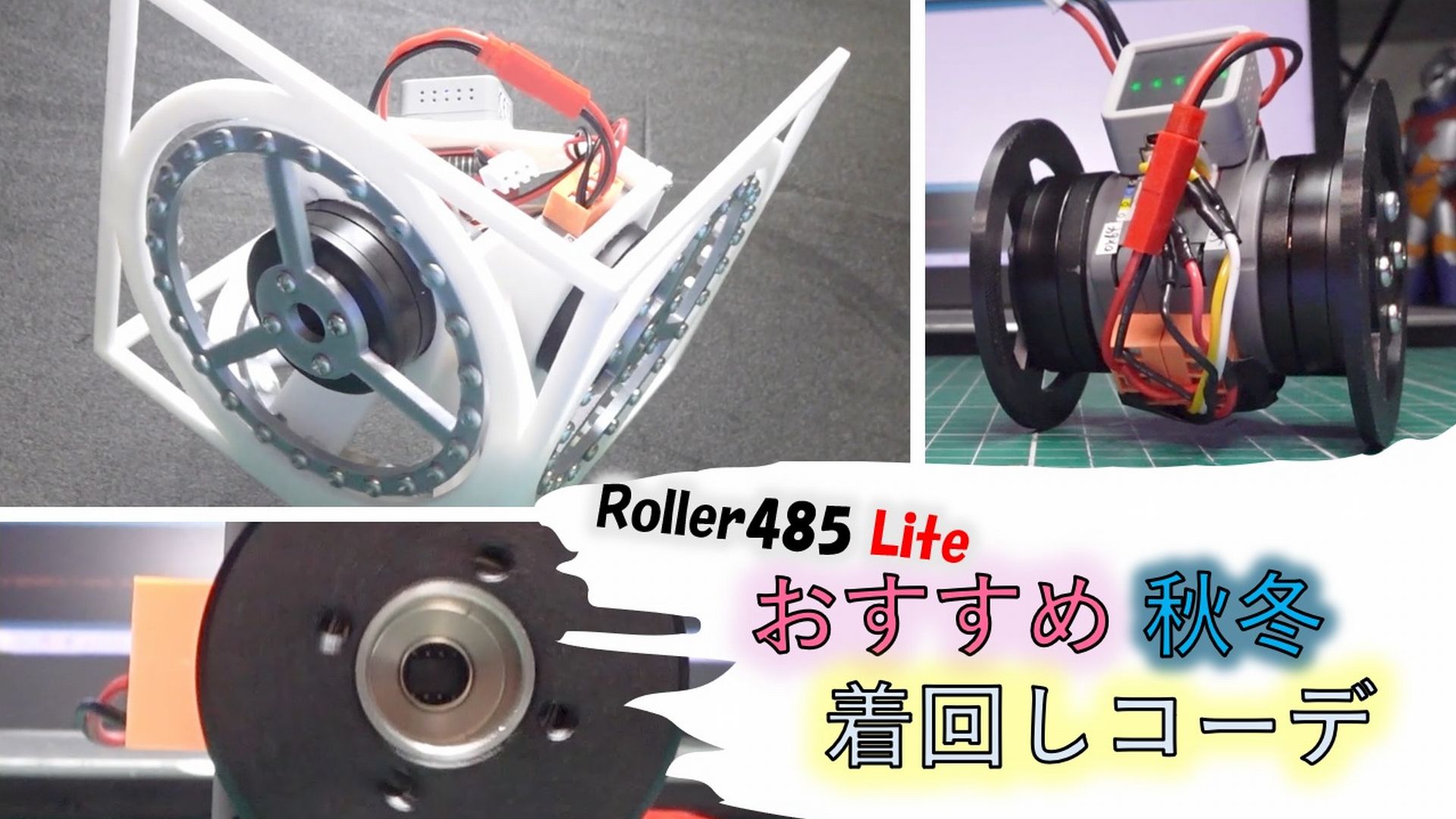
Roller485 Lite おすすめ秋冬着回しコーデ
M5Stack社よりマイコンSTM32内蔵のブラシレスモータユニットが発売されました。 [bc url="https://docs.m5stack.com/ja/unit/Unit-Roller485%20Lite"] 最近はSimpleFOCを活用したブラシ...
電子工作 2024.10.20 お父ちゃん ![]()

PS4コントローラ で ロボティクス
前々からやってみたいと思っていたゲームコントローラによるロボット制御に挑戦してみました。 PS4コントローラとESP32連動 以下の記事を参考にPS4コントローラとESP32の連動を試しました。 [bc url="https://gijin77.blog.jp/archives/...
電子工作 2024.7.18 お父ちゃん ![]()

玉乗りロボット 深掘り
先日、玉乗りロボットを製作し動作を確認しました。 https://homemadegarbage.com/ballride-01/ ここではモータの再検討と移動動作なども考えてみました。 モータ高速化 モータスピードに不足を感じていたので高速化を目指しました。 ...

玉乗りロボット つくってみた
玉乗りロボットの製作に挑戦いたしましたので報告します。 玉乗りロボット 以前AliExpressサーフィンをしていたところ... これオムニホイールでできるんか! あとBGMが謎 ¥18673.0 6% OFF|二つの開発のボールバランスのとれた球状自...

狭ピッチLEDテープを試してみた
長いこと欲しい欲しいと憧れの思いを持っていた狭ピッチのLEDテープをアリエクで見つけました。 [bc url="https://ja.aliexpress.com/item/1005006171052147.html?spm=a2g0o.order_list.order_list_main.10....
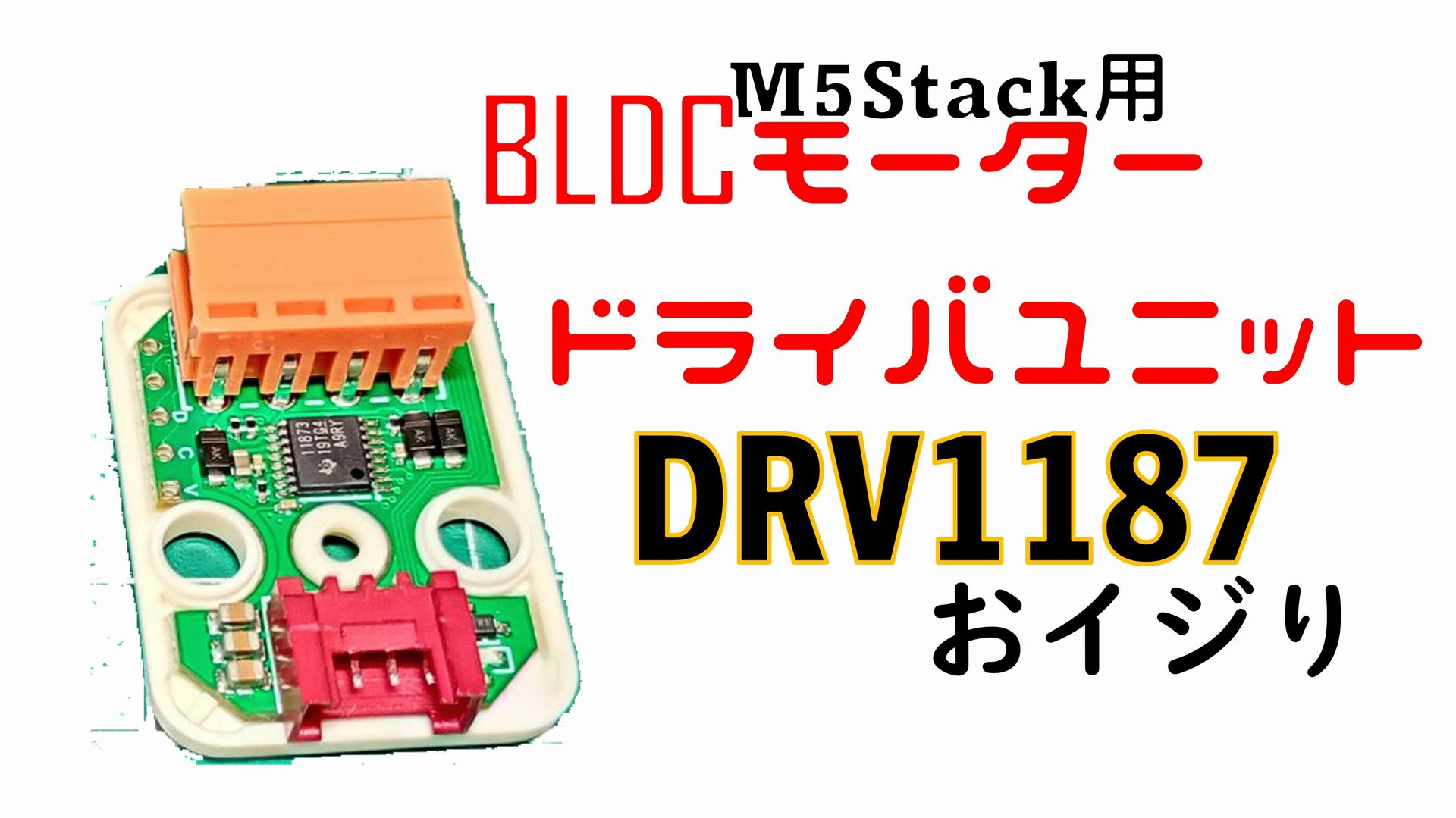
M5Stack BLDCモータードライバユニット DRV11873 おイジり
前回はM5Stack用BLDCモータードライバユニットの味見動作の確認を実施しました。 https://homemadegarbage.com/bldc-unit01 迅速な回転方向転換や低速での起動が難しく倒立振子への利用は難しいことが分かったのですが、せっかくな...
電子工作 2024.5.25 お父ちゃん ![]()

M5Stack BLDCモータードライバユニット 火入れ
M5Stack用BLDCモータードライバユニットを購入しました。 [bc url="https://www.switch-science.com/products/9651"] もろもろ味見してみたので報告いたします。 1st 火入れ&味見 開封から火入れをライ...
電子工作 2024.5.22 お父ちゃん ![]()
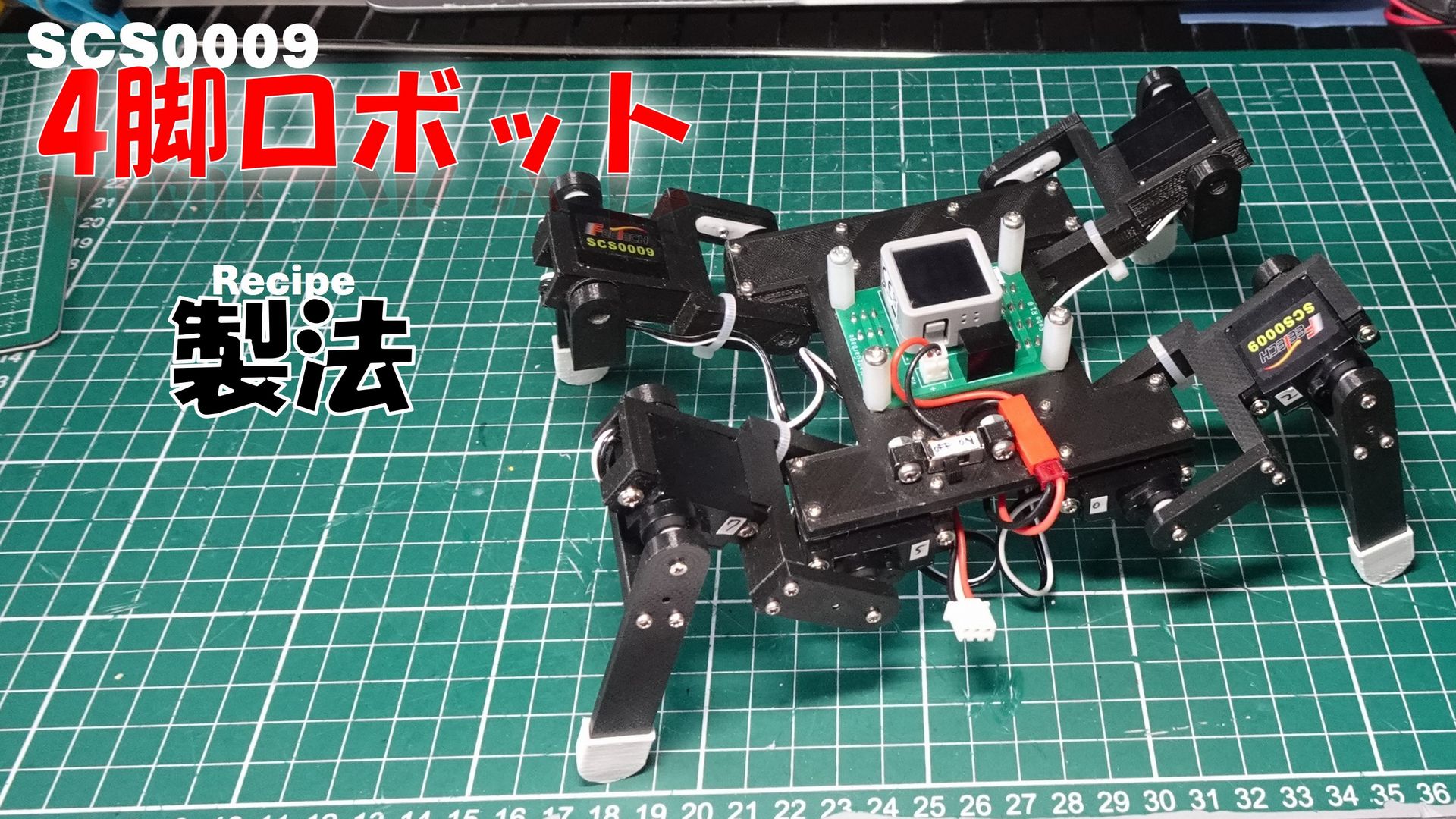
SCS0009を用いた4脚ロボットの製法
はじめに これまでに各種サーボモータを使用して4脚ロボットを製作してきました。 以下の記事ではシリアルサーボの STS3032 と SCS0009 、そしてPWMマイクロサーボでの比較を実施しました。 https://homemadegarbage.com/robotdog03// &nbs...
電子工作 2024.4.23 お父ちゃん ![]()
コロコロロボット開発
最近はYouTubeライブ配信に凝っており、これまでは事前に開発した作品の組み立ての様子を配信しておりました。 https://homemadegarbage.com/youtube-live-01/ だいぶ配信にも慣れYouTubeライバーとしての自覚も芽生えてきましたので、今...
電子工作 2024.4.20 お父ちゃん ![]()
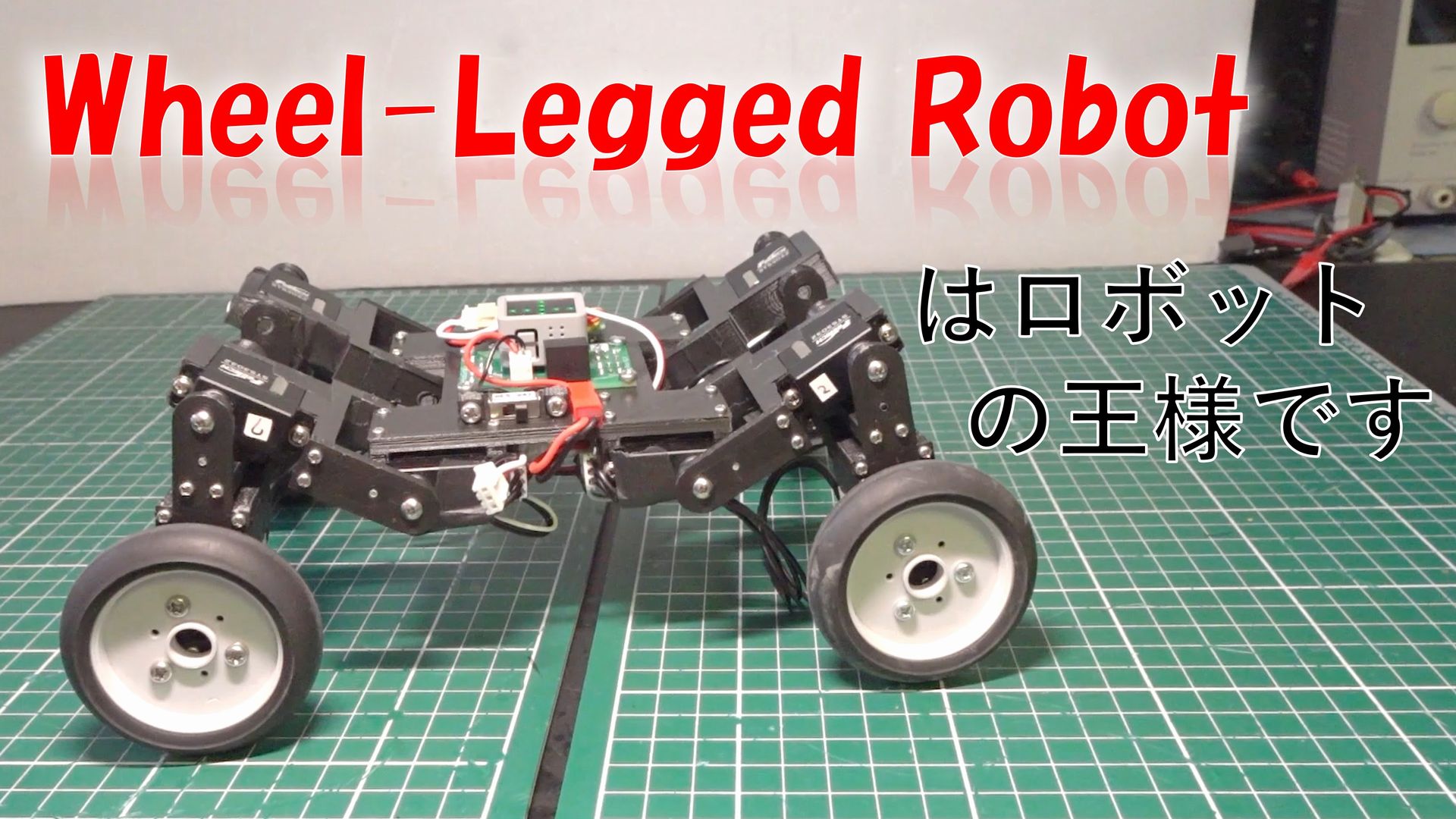
Wheel-Legged Robot はロボットの王様です
今回は Wheel-Legged Robot について考えました。 Wheel-Legged Robotは過去に何度か製作しております。 https://homemadegarbage.com/wheel-leg/ https://homemadegarbage.com/spresense23...
電子工作 2024.3.22 お父ちゃん ![]()