
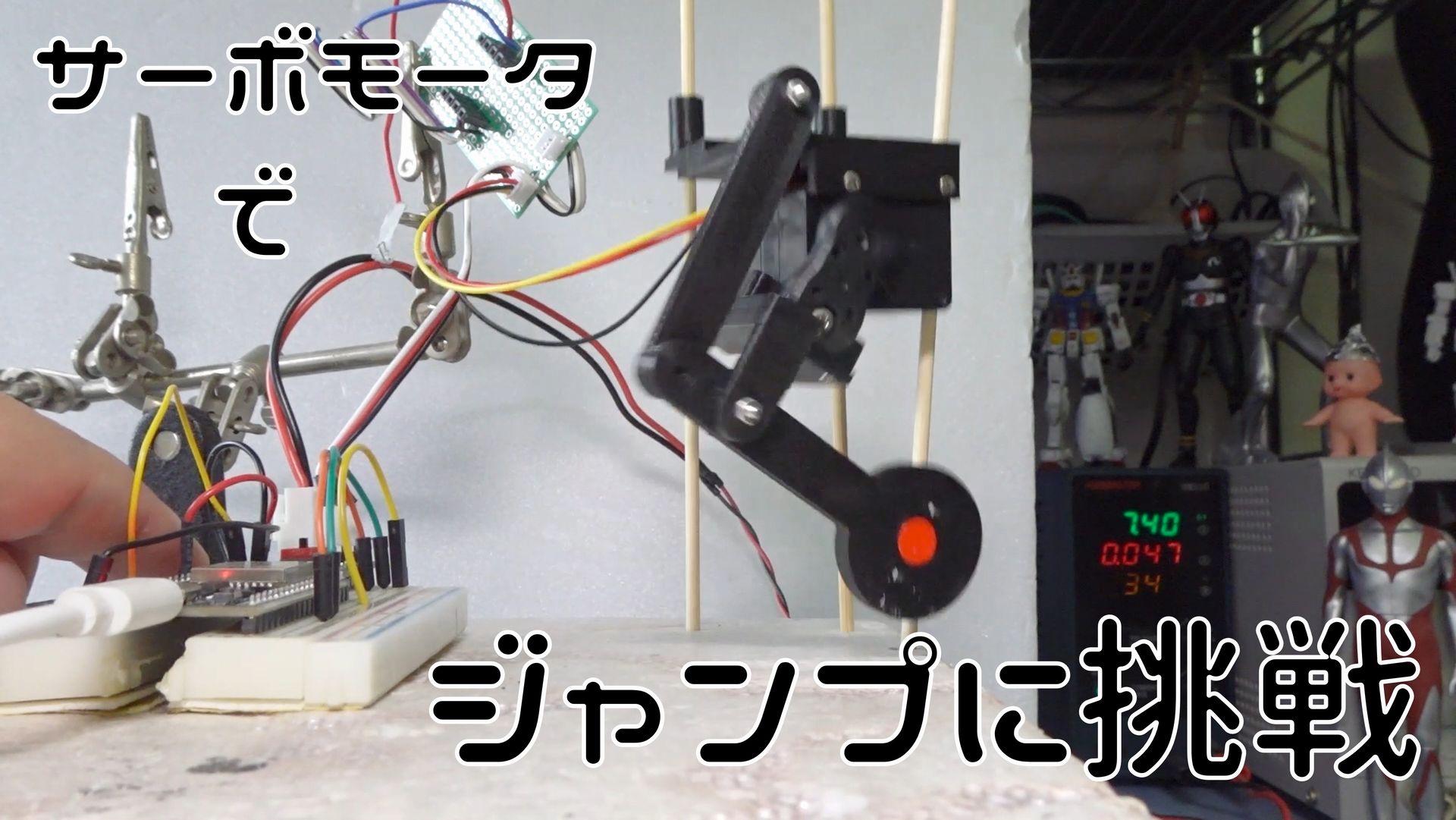
サーボモータ
ロボット犬つくってバク転させてみた
前々からやってみたいと思っていたロボット犬のバク転を実現するべく頑張りましたので報告します。 これやってみたいよなー ミニぷぱでも試したことあるけど、サーボのトルクや足の構造上で無理でした。 https://twitter.com/H0meMadeGarbage/statu...
電子工作 2023.10.20 お父ちゃん ![]()
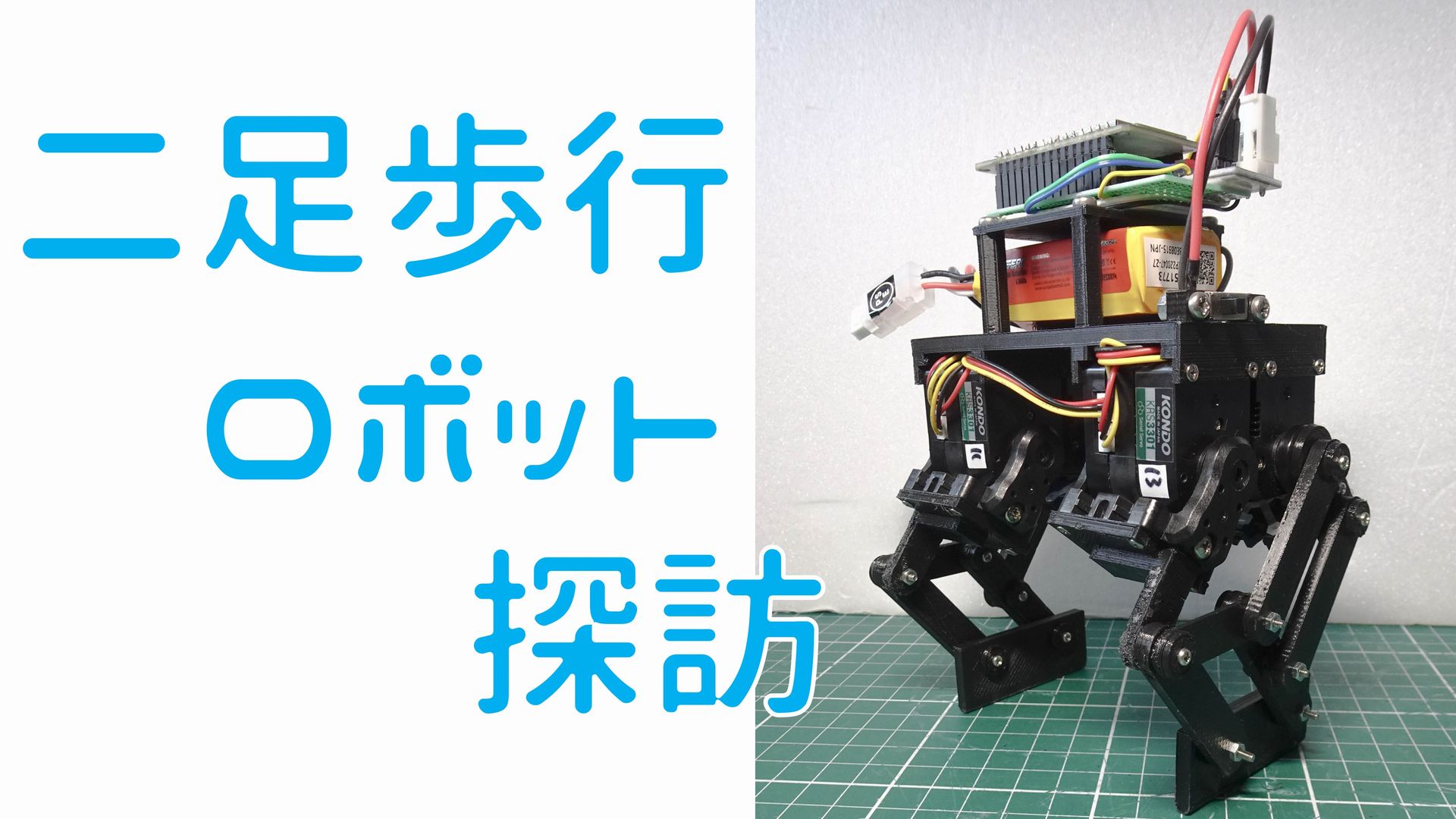
二足歩行ロボット 探訪
X (旧Twitter) にて面白いロボットを目にし、改めて二足歩行ロボットを調査・製作してみたくなりました。 https://twitter.com/H0meMadeGarbage/status/1708976352165298456 考察と方針 コチラのロボッ...
電子工作 2023.10.8 お父ちゃん ![]()
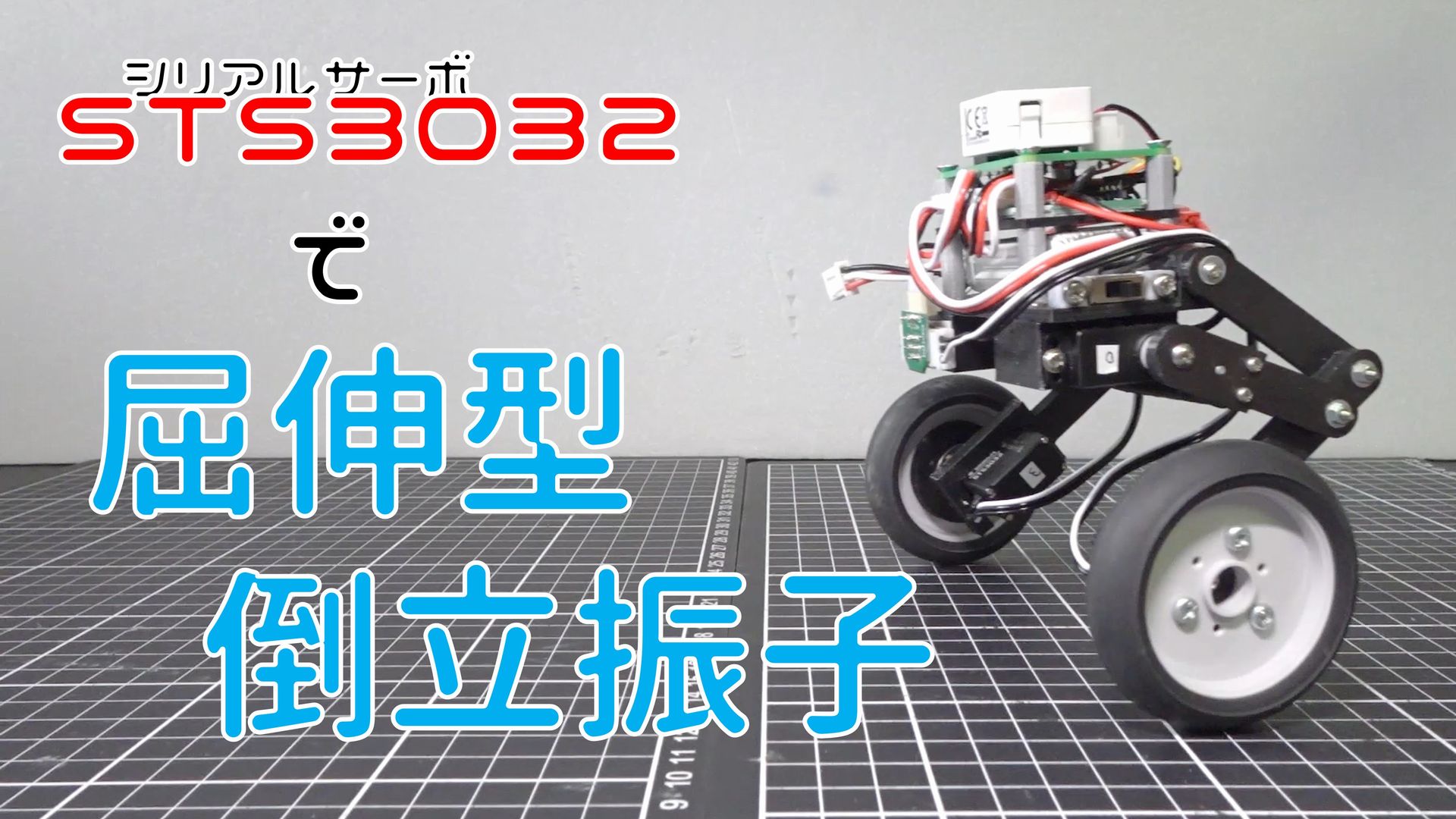
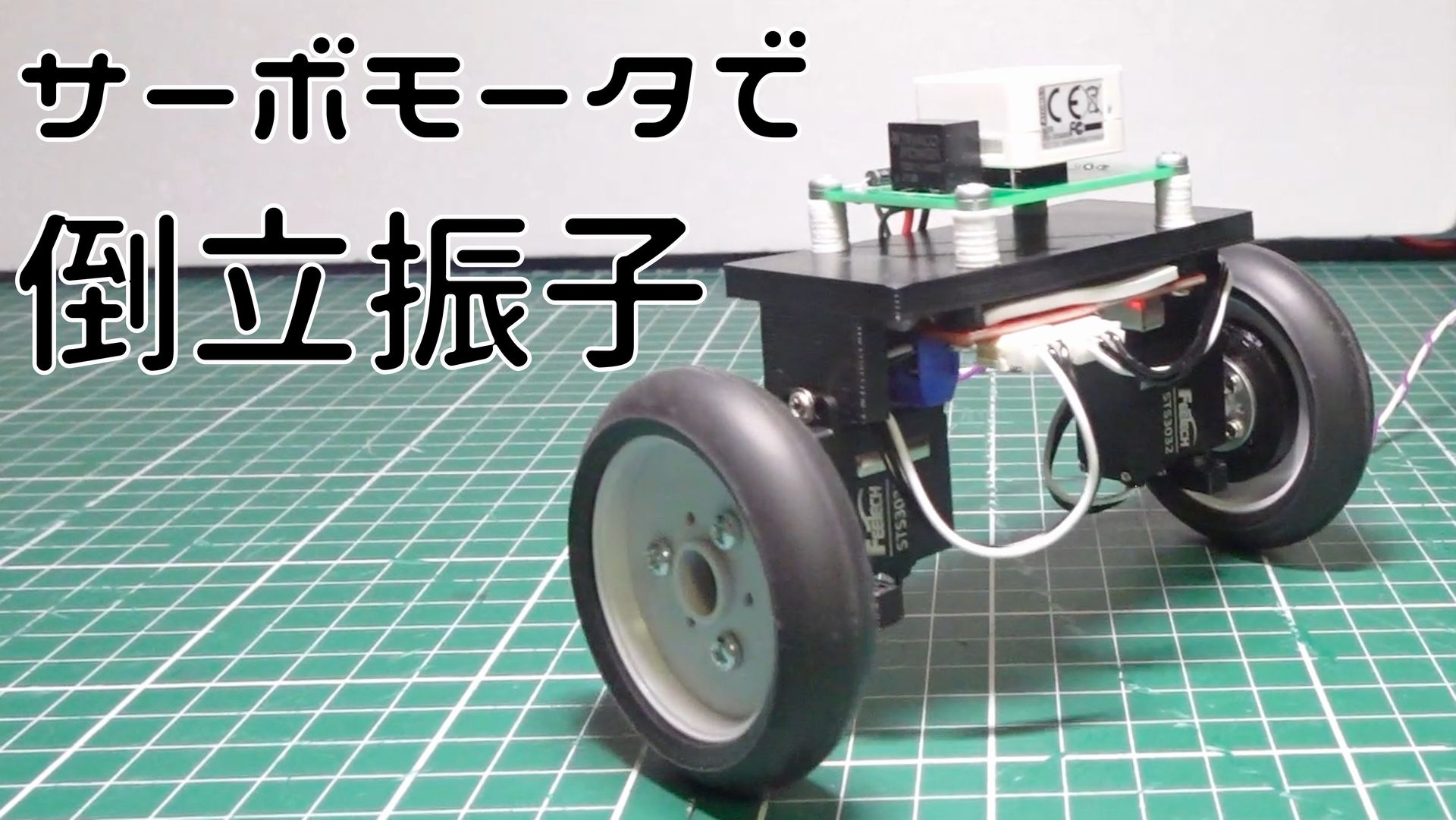
シリアルサーボ STS3032 で屈伸型倒立振子
前回はホイール駆動用にギアドモータを採用した屈伸型倒立振子を製作しました。 https://homemadegarbage.com/bala20/ ギアドモータの応答性に若干もたつきがあり縦横無尽に操作とはいきませんでした。 エンコーダなどを追加して回転速度をガッチリセンスすれ...
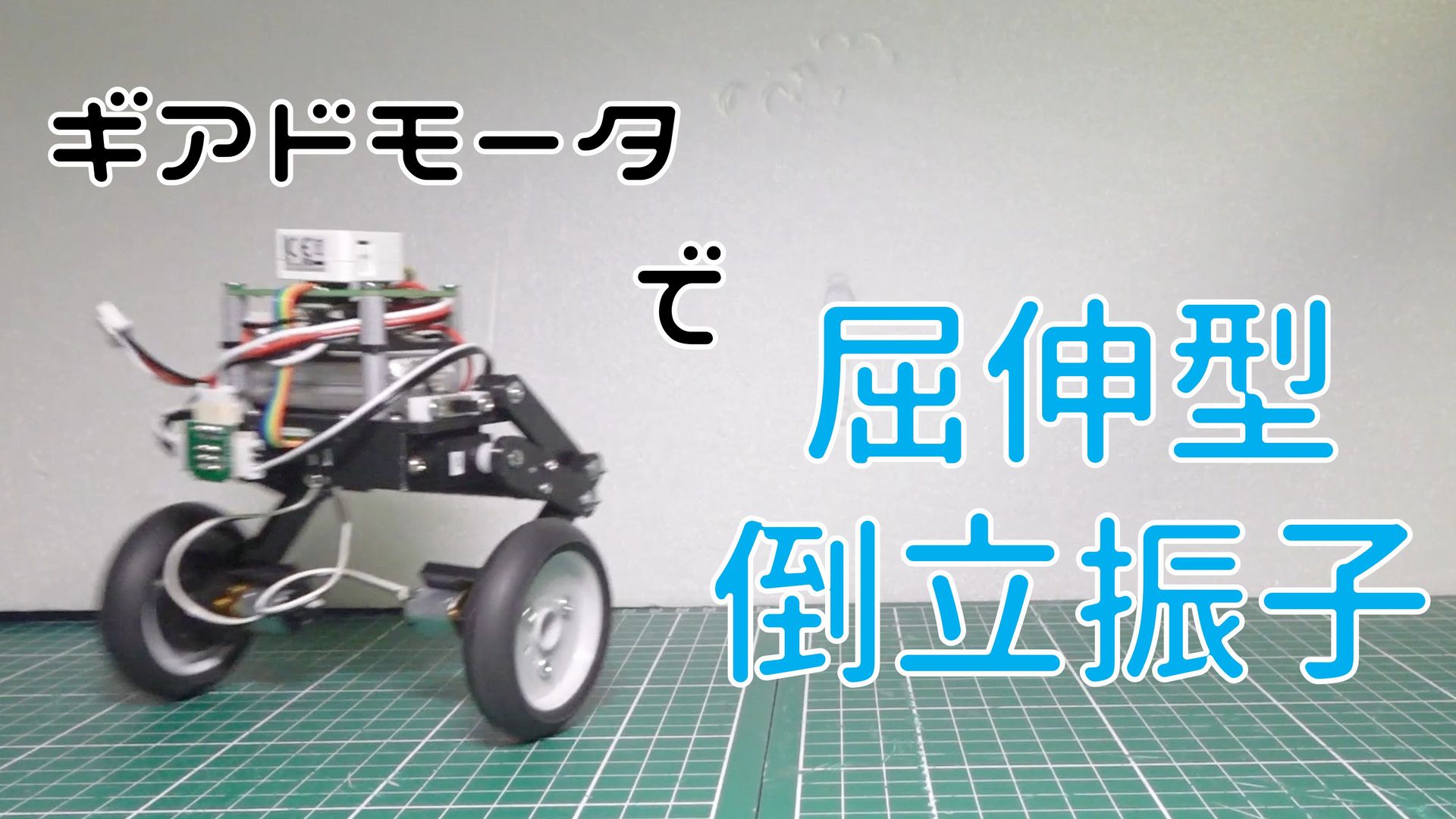
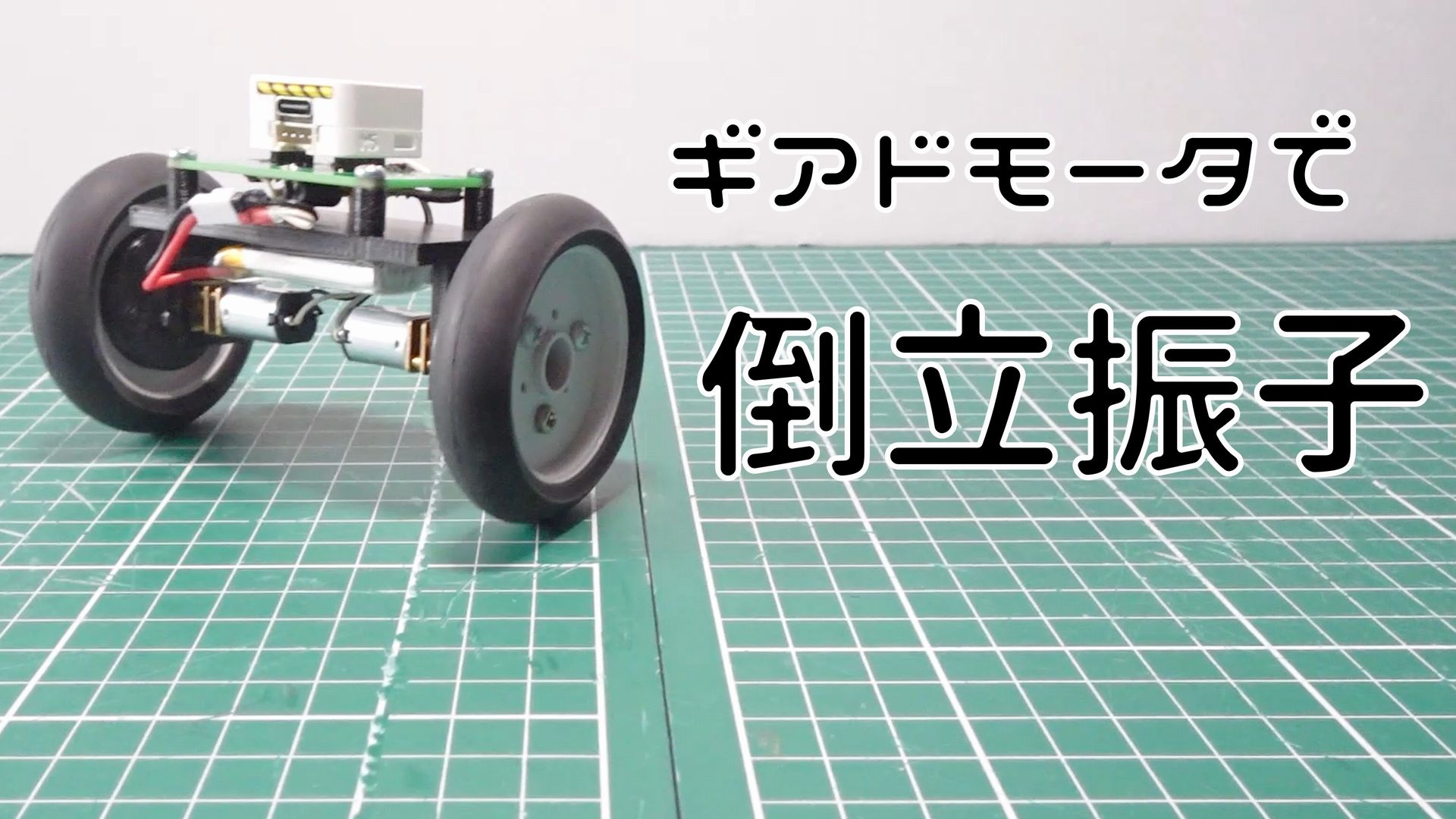
ギアドモータで屈伸型倒立振子
以前 ギアドモータを用いて倒立振子製作を楽しみました。 https://homemadegarbage.com/bala16// 小型で軽いのでギアドモータで屈伸型の倒立振子の製作も試してみました。 筐体製作 屈伸型の筐体を3Dプリントで製作しま...

Wheel-Legged Robot ホイレグくん
ここ最近は倒立振子製作に力を入れておりました。 https://homemadegarbage.com/bala18// https://twitter.com/H0meMadeGarbage/status/1693568479520260488 こちらの屈伸型倒立振子を製作した際に、いつか4...
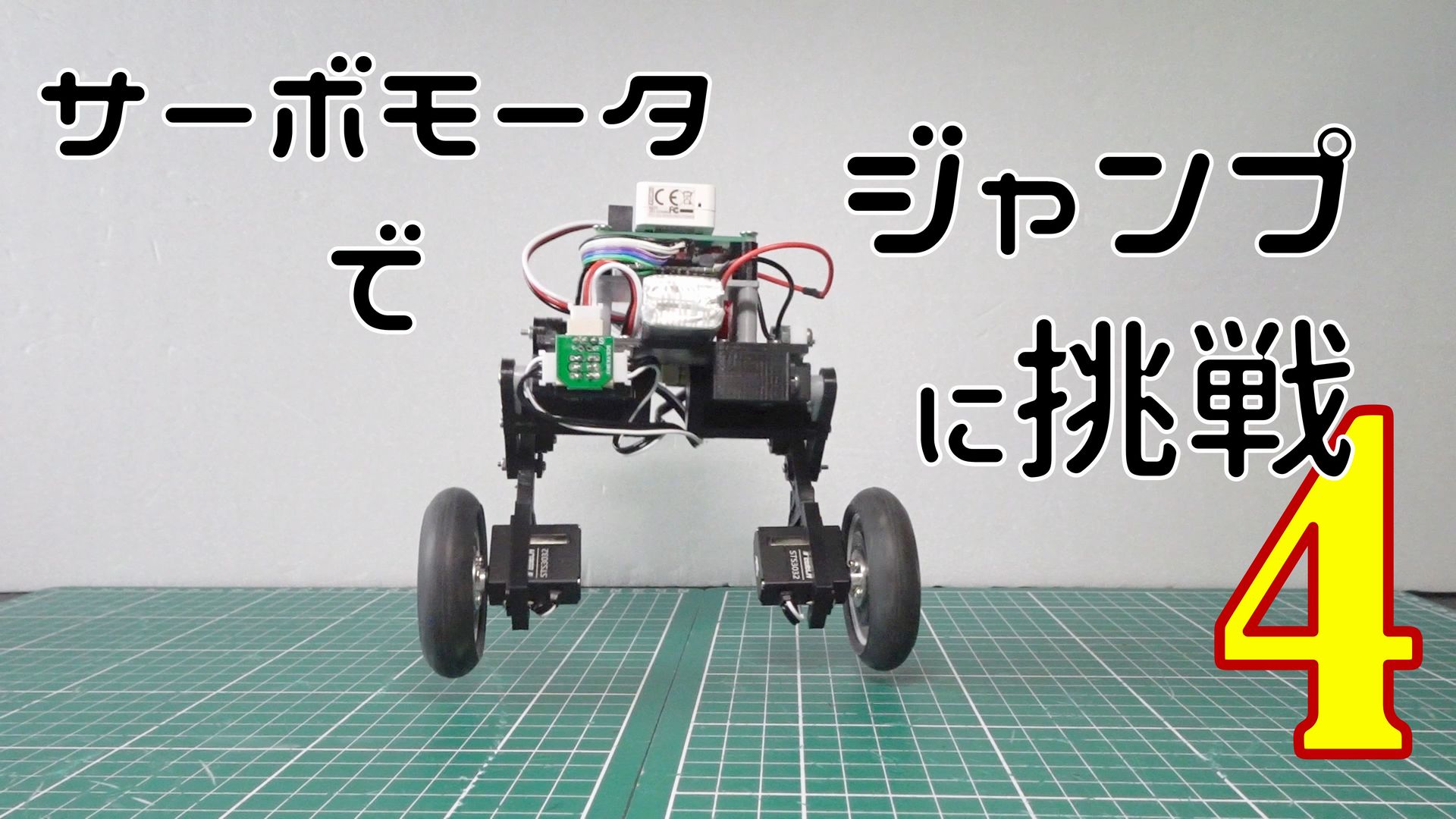
サーボモータでジャンプに挑戦4
前回はシリアルサーボ STS3032を用いての屈伸倒立振子を製作し、ジャンプ動作の確認を行いました。 https://homemadegarbage.com/bala17// しかし残念ながらジャンプ後の着地は実現できませんでした。 ホイール用モータ 倒立振子の...

サーボモータでジャンプに挑戦3
以前、シリアルサーボ STS3032 で構成した足によるジャンプ動作の確認を行いました。 https://homemadegarbage.com/bala15// ここで、屈伸型の倒立振子でジャンプする際にはホイール用のモータの軽量化も必要そうであることがわかりました。 前回は軽量のギアドモー...
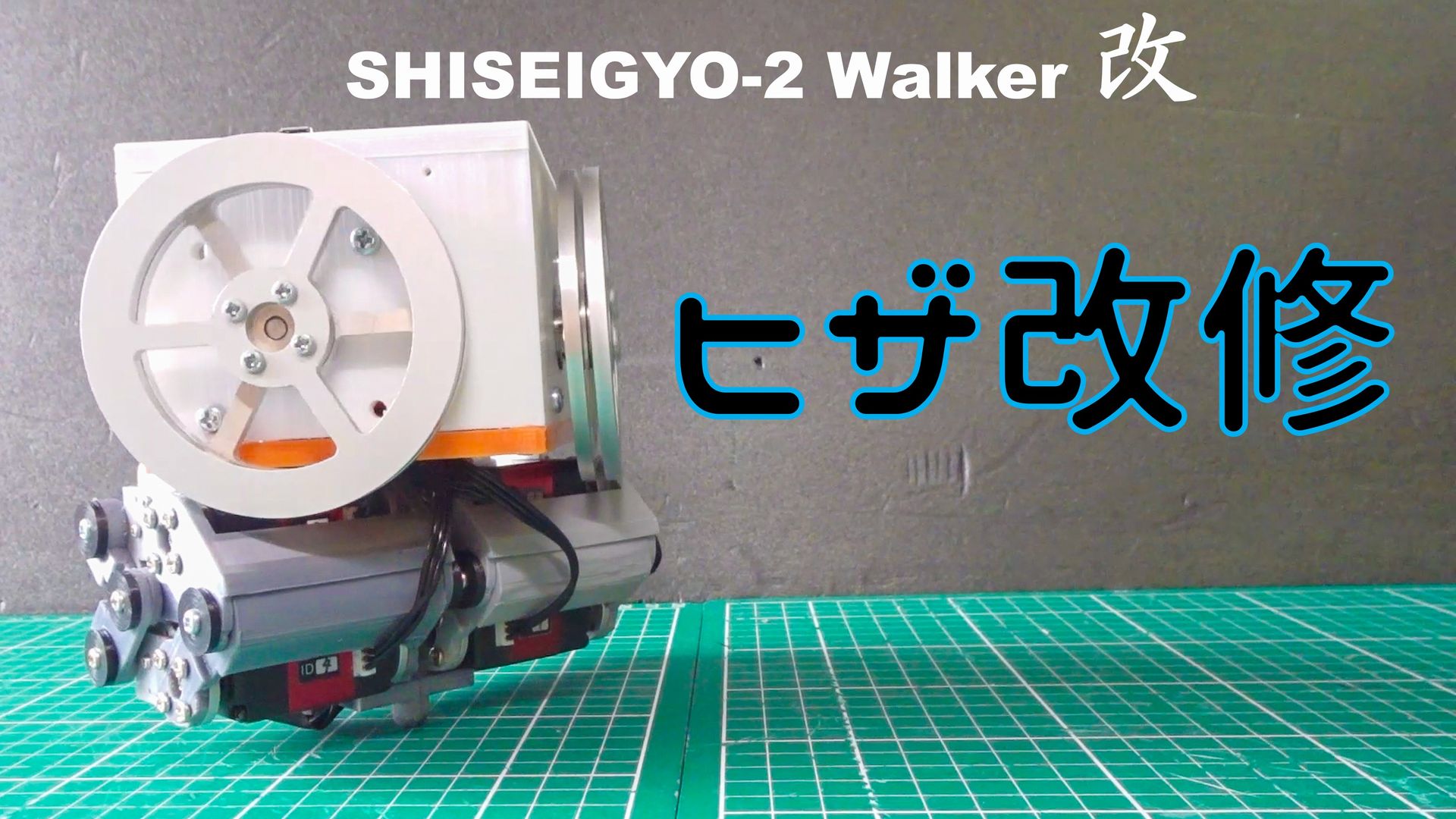
二足歩行ロボット SHISEIGYO-2 Walker 改 のヒザ改修
以前製作した二足歩行ロボット SHISEIGYO-2 Walker 改 ですが、 https://homemadegarbage.com/walker05// 関節がイジっているうちにグニャグニャになり うまく歩けなくなってしまいました。 https://twitter.com/H0me...
電子工作 2023.8.8 お父ちゃん ![]()
ギアドモータで倒立振子
前回はサーボモータKRS-3301とSTS3032 で2足ジャンプの検討を実施しました。 https://homemadegarbage.com/bala15// [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-33...
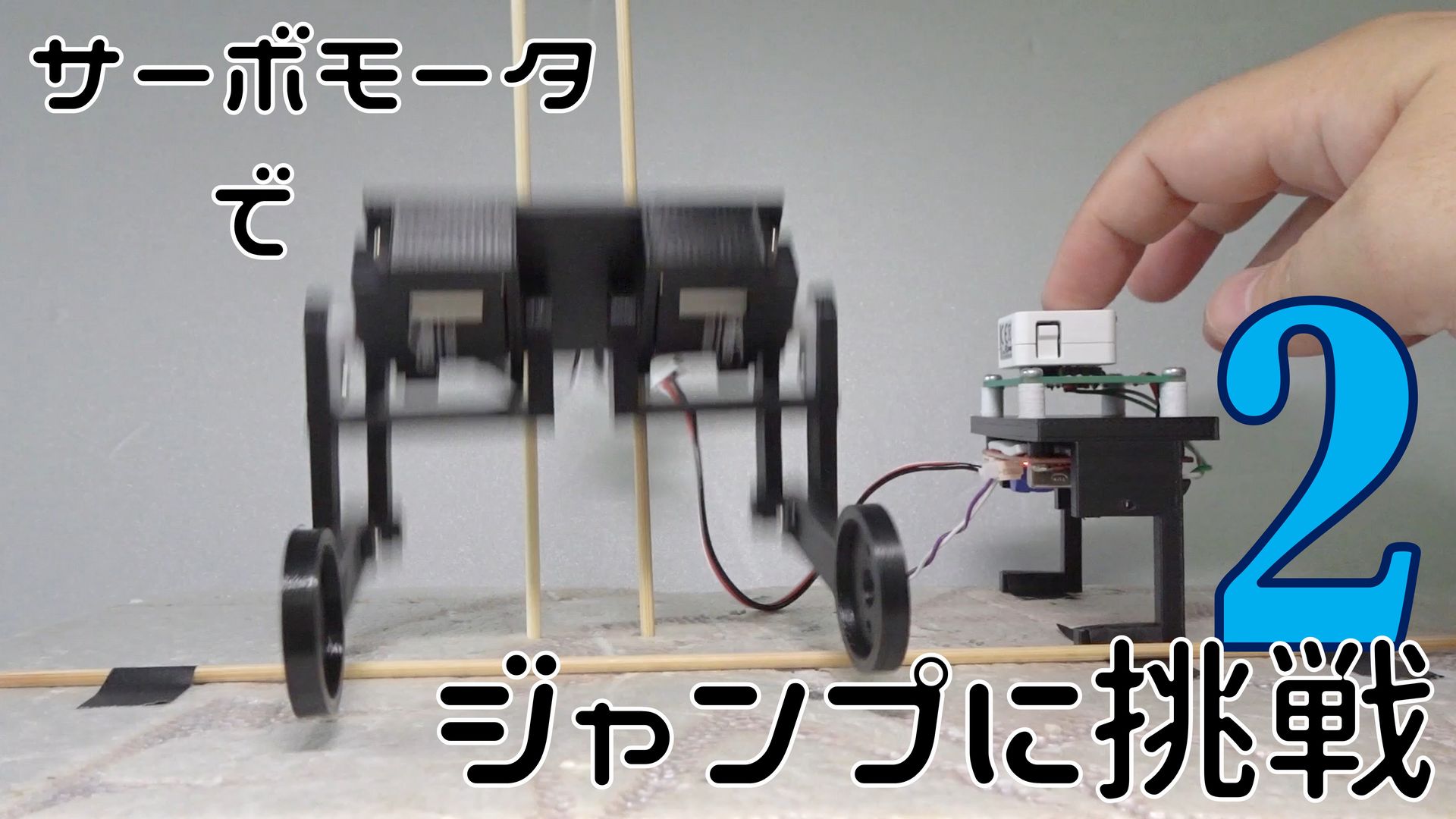
サーボモータでジャンプに挑戦2
以前、サーボモータで足を構築してジャンプ動作の確認を実施しました。 https://homemadegarbage.com/bala13// ここでは更に検証しましたので報告します。 KRS-3301 前回は KRS-3301で1脚ロボットを作製してジャンプ動作...
本当にサーボモータで倒立振子
前回はサーボモータを用いて足を構成してジャンプ動作の検討を実施しました。 https://homemadegarbage.com/bala13/ ここではサーボモータでホイールを制御する倒立振子を再び検討します。 https://twitter.com/H0meMadeGarb...
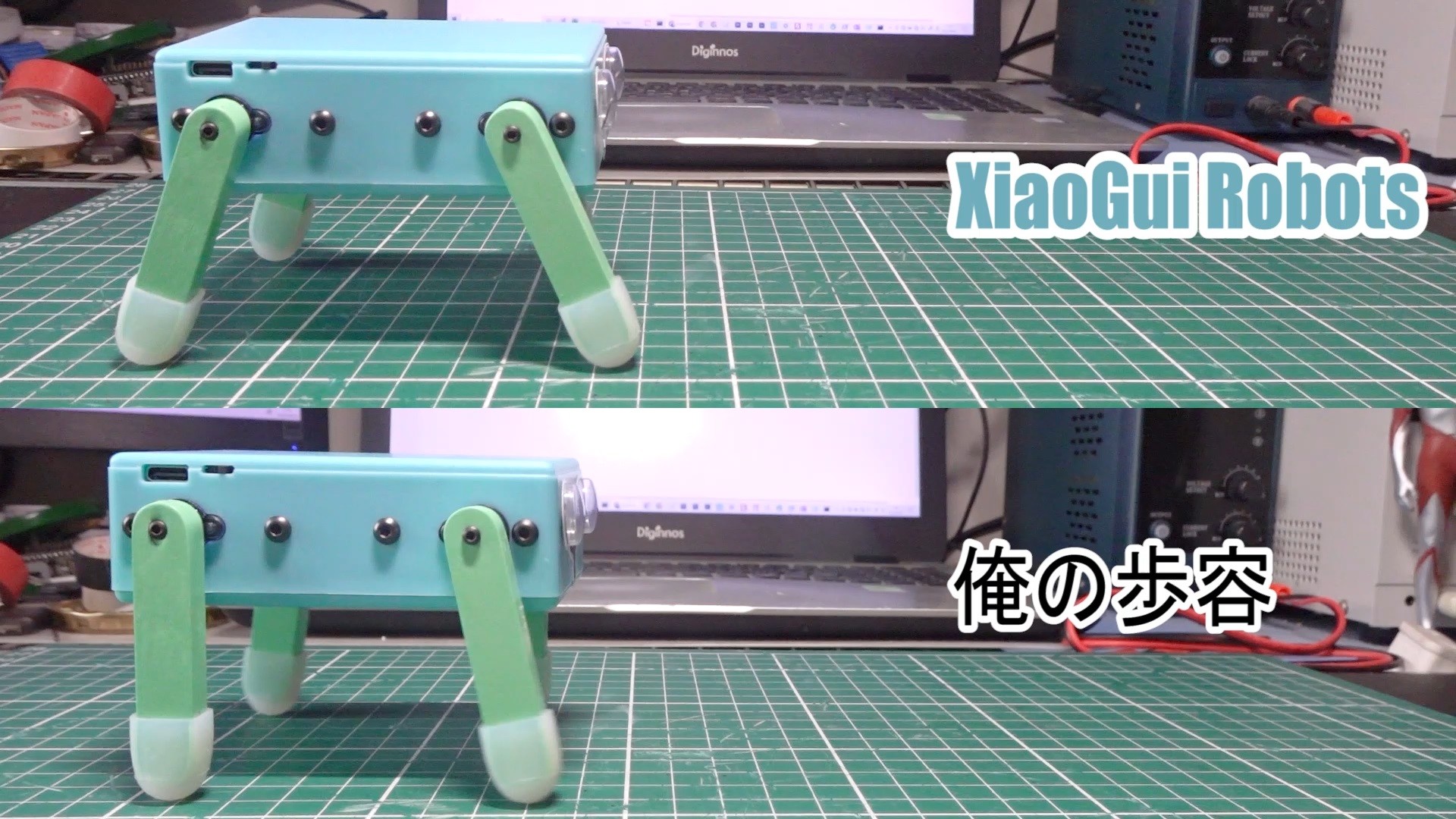
卓上小型ロボット犬の歩容研究
前回はブロックプログラミングでロボット動作の確認を実施しました。 https://homemadegarbage.com/xiaogui02// ここではサーボの角度を指定するブロックでロボット犬の歩容を勉強します。 歩容 さっそく前進のプ...
電子工作 2023.8.3 お父ちゃん ![]()
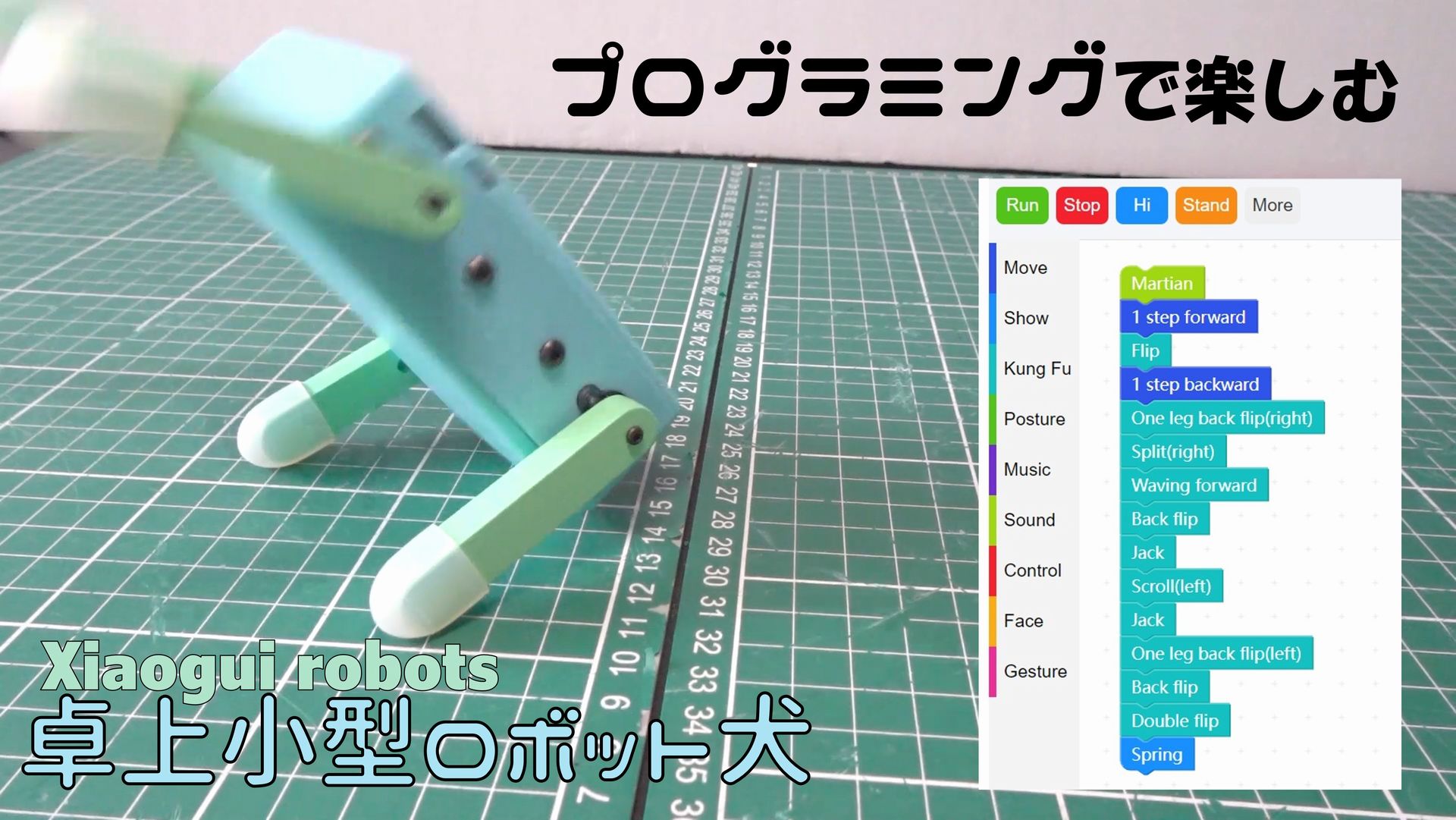
卓上小型ロボット犬をプログラミング
前回は いただいた4つのサーボによる小型ロボット犬の基本動作を楽しみました。 https://homemadegarbage.com/xiaogui01 ロボットの購入先は☟コチラ https://shop.guidan.com/products/xiaogui-robot-dog &...
電子工作 2023.8.2 お父ちゃん ![]()
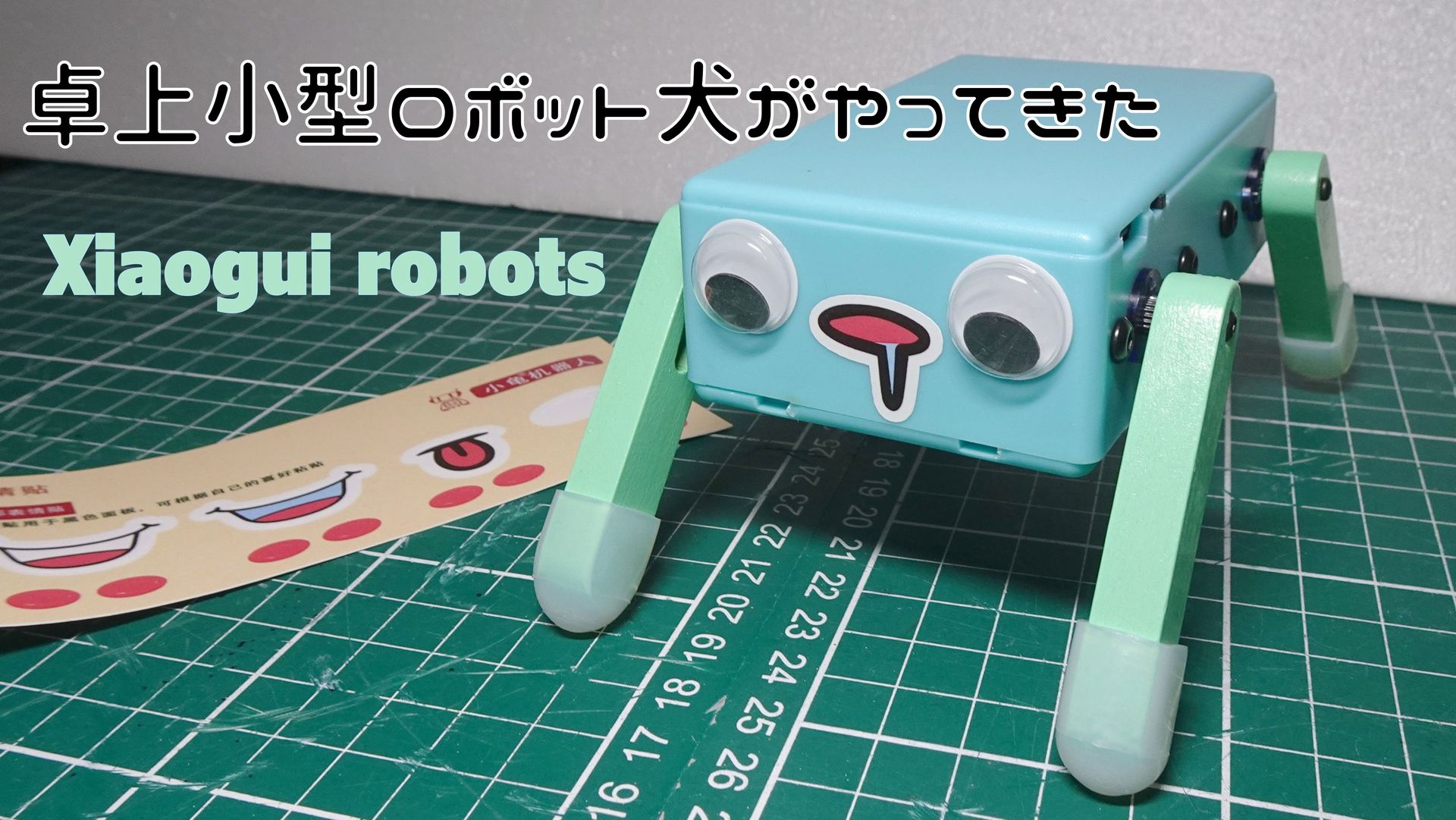
卓上小型ロボット犬がやってきた
なんと xiaogui robots (@wgy421) 様より小型ロボット犬のサンプルを提供いただけました!! ありがとうございます!!! 早速 組み立てて動かしましたので報告いたします。 The world smallest robot dog at ...
電子工作 2023.8.1 お父ちゃん ![]()
サーボモータでジャンプに挑戦
以前に屈伸タイプの倒立振子を製作しました。 https://homemadegarbage.com/bala11 この倒立振子をジャンプさせてみたくなったので検討します。 ジャンプする倒立振子 こんなすごい倒立振子を見つけました。 https://twitte...