シリアルリンク 2足歩行ロボットの製作11 ー もろもろ改造 ー
本記事にはアフィリエイト広告が含まれます。
前回はシリアルリンク 2足歩行ロボットのヒザモータをブラシレスモータ BE4108 380KVに変更して動作を確認しました。
今回はかなり踏み込んだ改造をもろもろ実施したので報告いたします。

目次
かかとYaw軸
以前股関節にYaw軸機構を設けて旋回動作を楽しみました。
このYaw軸機構を足底に設けてはどうかと思い立ちました。
つまり人間のかかとのように軸を設けるのです。
駆動用にサーボを検討しました。
Yaw軸を股関節ではなく足首でやってはどうかという夢を見た pic.twitter.com/AVPrpZ2dou
— HomeMadeGarbage (@H0meMadeGarbage) August 10, 2025
かかとを設計
たとえばこうとか pic.twitter.com/pyblc9VhFO
— HomeMadeGarbage (@H0meMadeGarbage) August 10, 2025
サーボを実装して動作確認
要するにかかと
どうだろうね? pic.twitter.com/orvlKbKwFq— HomeMadeGarbage (@H0meMadeGarbage) August 10, 2025
うむ。いい感じ
どうだろね
みたことないけど pic.twitter.com/IN5FzHikTE— HomeMadeGarbage (@H0meMadeGarbage) August 10, 2025
ロボに実装
サーボによるかかとYaw軸機構がイケそうだったのでロボに導入します。
Robotics pic.twitter.com/yqmbx29xxu
— HomeMadeGarbage (@H0meMadeGarbage) August 11, 2025
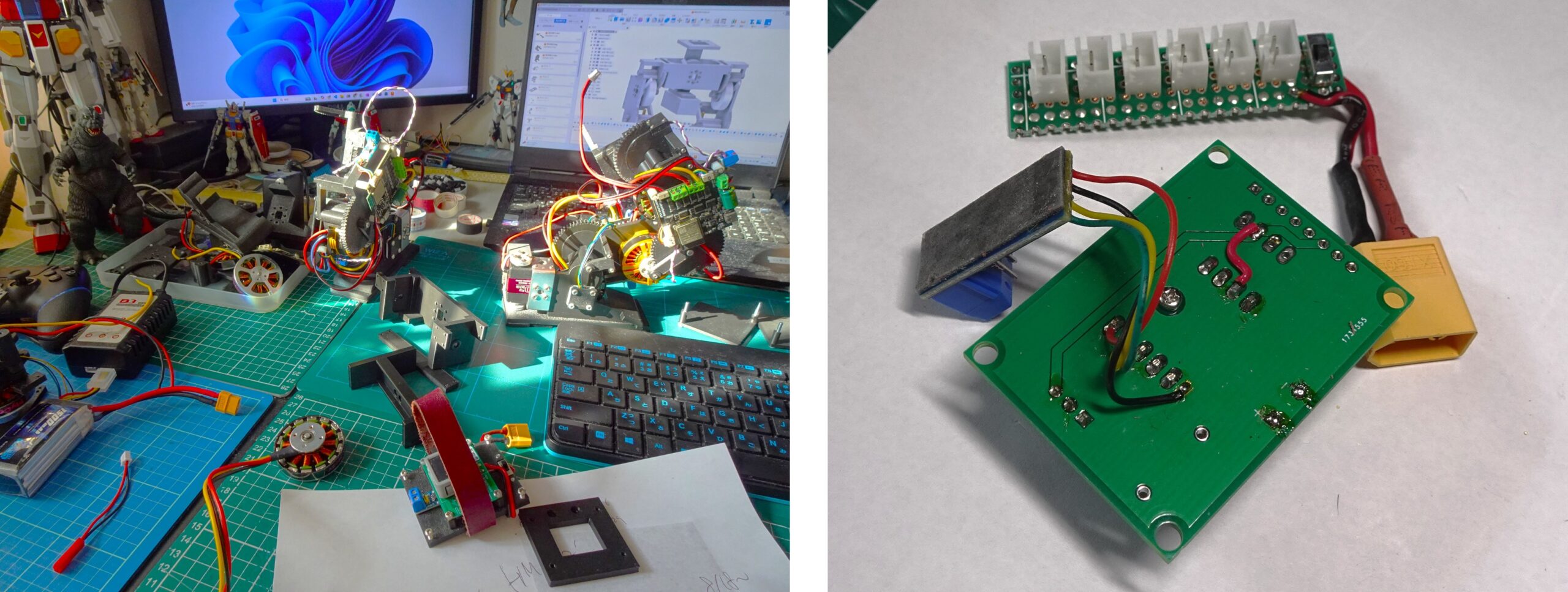
ロボのLiPoバッテリ (11.1V)電源をDCDCで6.8Vに降圧してサーボに供給しています。
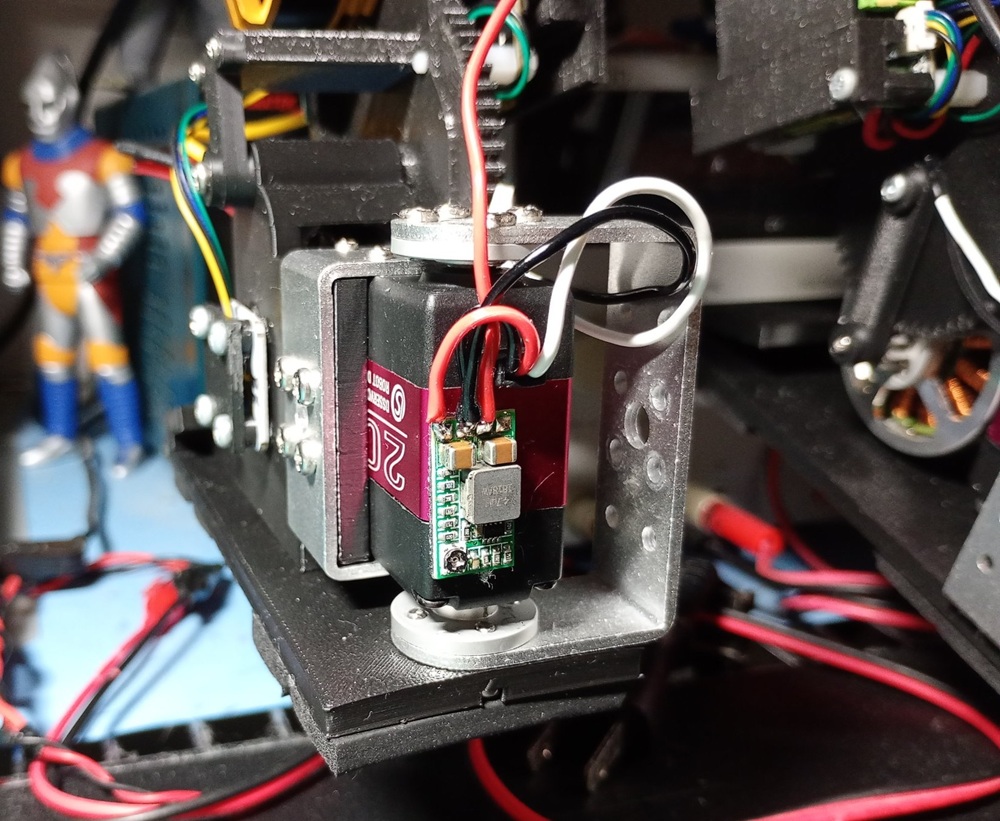
かかとサーボのブラシレスモータと同様にCAN通信でマスターコントローラATOM Matrixから角度指定できるようにしました。
CAN通信でかかとYaw角も制御できるようになった
なんだか楽しげなので
他方の足にも展開してみましょう pic.twitter.com/fVJvEZpcxa— HomeMadeGarbage (@H0meMadeGarbage) August 11, 2025
実装完了!
かかとシステム
うまくいくかどうか pic.twitter.com/84D3LjY669— HomeMadeGarbage (@H0meMadeGarbage) August 11, 2025
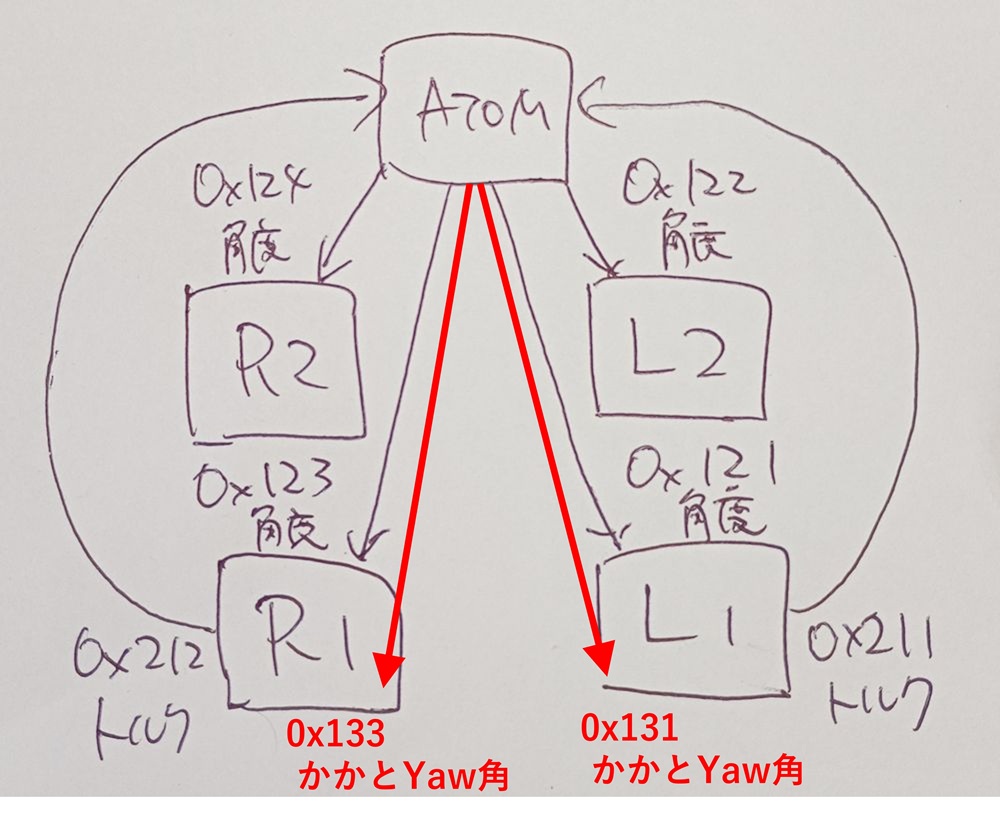
CAN通信システムは以下の通り かかとサーボ用に信号を追加しました。
動作
かかとYaw軸機構をおためし
かかとYaw軸 旋回動作味見
イケそうだな pic.twitter.com/M2f2VyrLVL— HomeMadeGarbage (@H0meMadeGarbage) August 11, 2025
うまいこといって大満足
体幹Roll
かかとYaw軸がうまくいったので、股関節Yaw軸機構を廃止することができます。
続いて廃止後の股関節部にコントローラやLiPoバッテリを平行に保つ、体幹Roll機構の導入を思い立ちました。
早速設計
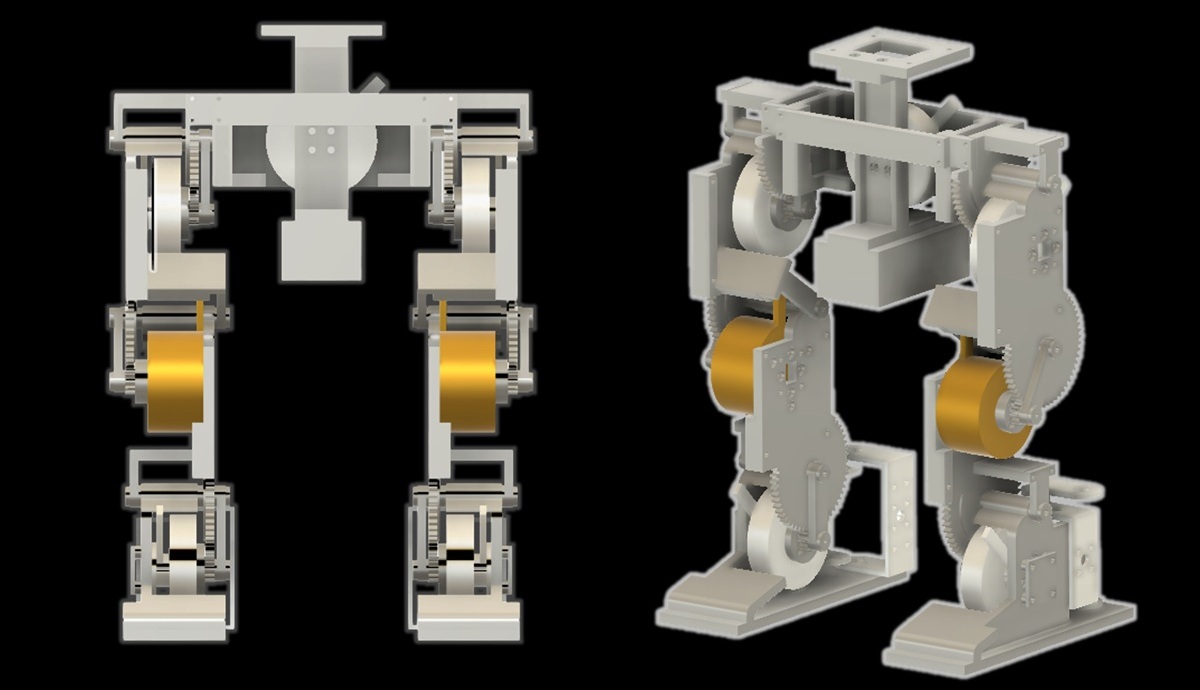
製作
ブラシレスモータのダイレクトドライブで平行維持を想定
— HomeMadeGarbage (@H0meMadeGarbage) August 12, 2025
機械は概ね完成 pic.twitter.com/mFXRUmmHEP
— HomeMadeGarbage (@H0meMadeGarbage) August 12, 2025
お試しでモータ制御なしで動かしてみた。
体幹Roll 無制御で味見
LiPoバッテリが重りとなりそれなりに動く pic.twitter.com/kIyH4lDek5— HomeMadeGarbage (@H0meMadeGarbage) August 13, 2025
LiPoバッテリが重りとなり制御なしでも体幹がロールして割とスムーズな足踏み動作が実現できました。
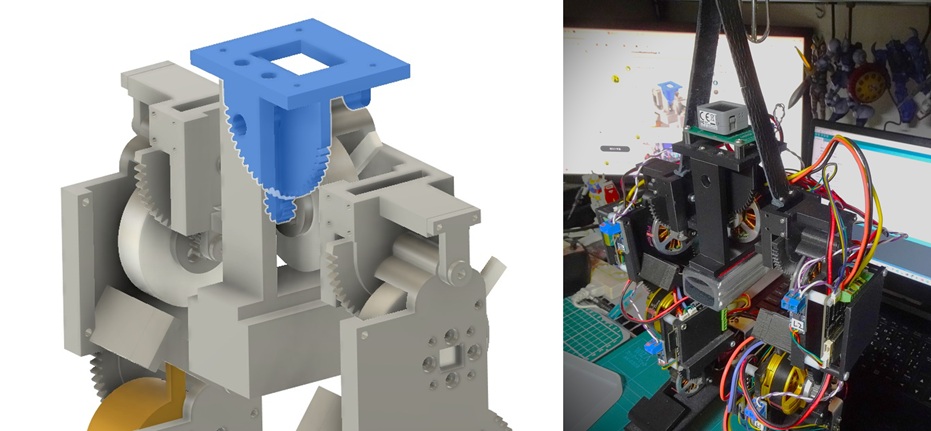
ギア導入
体幹Rollが有効と判断し、いざブラシレスモータで制御しようとしたのですがトルク不足てダイレクトドライブによる平行維持が難しかったです(制御しきれずリンギングしまくり)。
そこでギアを導入することにしました。
ATOM Matrix内蔵のIMUで姿勢角を検知して体幹を平行に制御しまんねん
こういう平行保つ制御は得意なんだよね pic.twitter.com/Lz2jVF1KSi
— HomeMadeGarbage (@H0meMadeGarbage) August 13, 2025
こういうのはHomeMadeGarbageの十八番よな
動作
体幹Rollによりウェイトシフトが容易となり元気な足踏みが実現できました。
実に元気な足踏み pic.twitter.com/wJge6RWuwF
— HomeMadeGarbage (@H0meMadeGarbage) August 13, 2025
IMUが乗ってる体幹を平行維持する制御にしたので、足を下すタイミングを体の傾きの角速度符号反転時から時限式に変更しました。
おわりに
ここでは かかとYaw軸や体幹Roll軸といった新しい機構の検証を実施しました。
机狭い
ブラシレスモータ2足歩行ロボット#Robotics pic.twitter.com/r0X7BSP3JC— HomeMadeGarbage (@H0meMadeGarbage) August 14, 2025
いずれも想定通りうまく機能して、生き生きとした動作が実現されました。
世にも珍しいキャンタマでバランスをとるロボット pic.twitter.com/EEedaKMNxV
— HomeMadeGarbage (@H0meMadeGarbage) August 16, 2025
次はヒザだけではなく股関節や足首のブラシレスモータもBE4108 に交換してみようと思っています。