シリアルリンク 2足歩行ロボットの製作12 ー 完成 the FINAL ー
本記事にはアフィリエイト広告が含まれます。
前回は かかとYaw軸や体幹Roll軸といった新しい機構の検証を実施しました。
改良は概ね良い結果が得られ大変に喜びました。
今回は最終仕上げとしまして、以前ヒザのブラシレスモータを BE4108 380KVに交換してよい結果を得たので足首や股関節のモータも交換してみようと思います。


目次
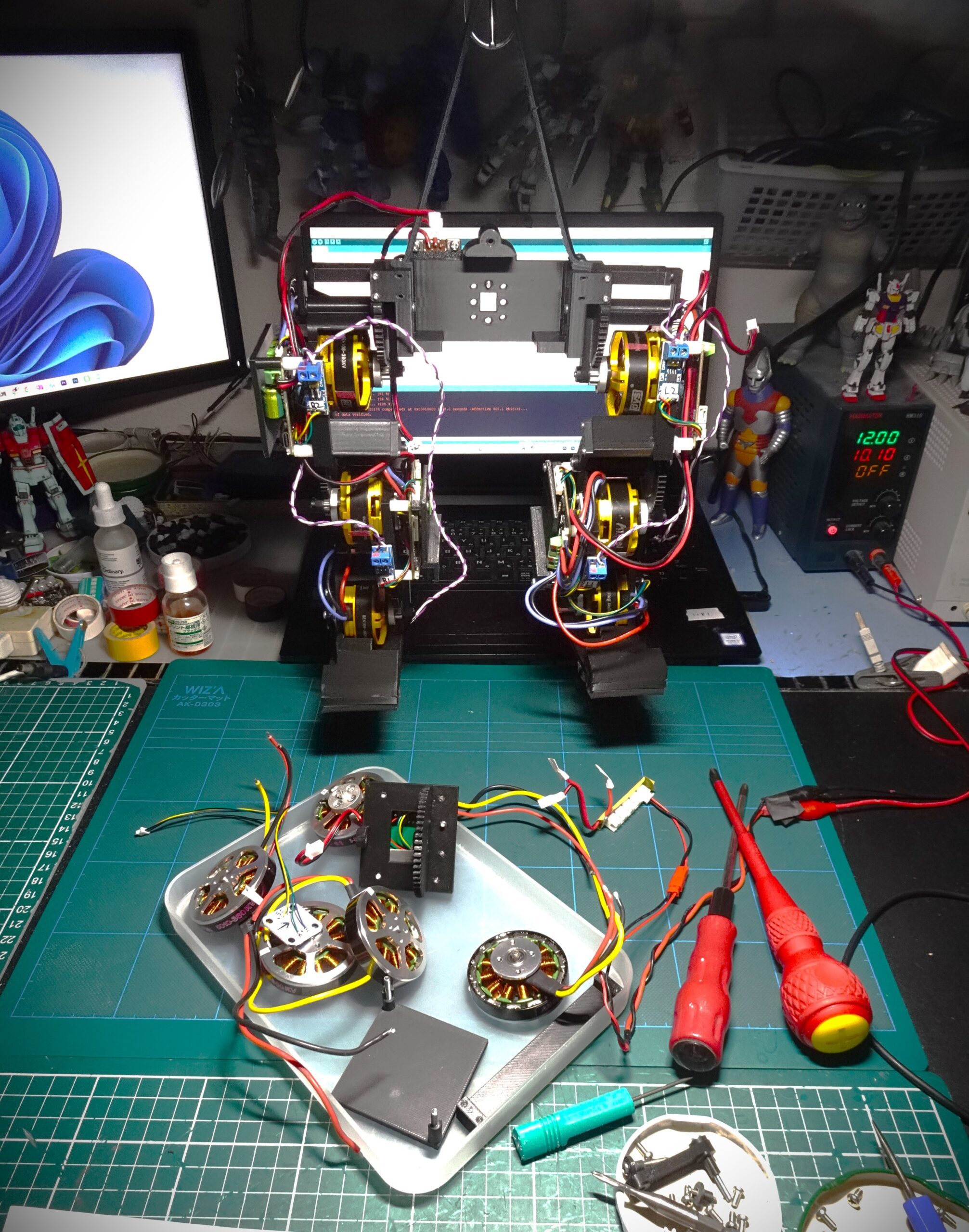
モータ全交換
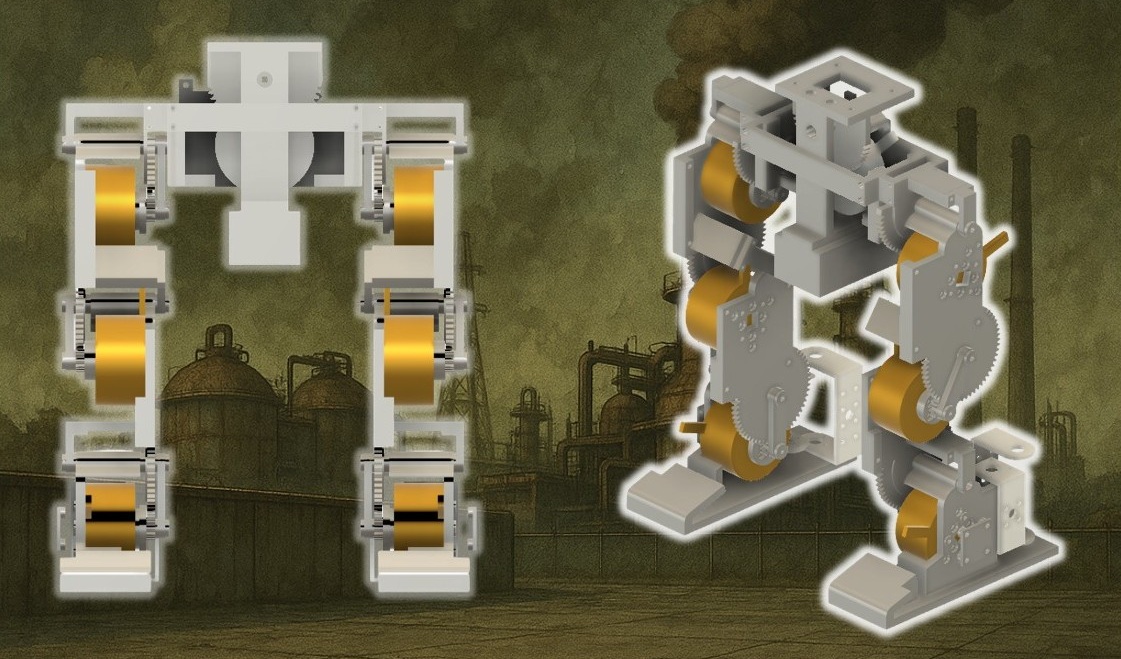
足首と股関節のモータを BE4108 に交換するべく再設計
BE4108 380KVは4つセットでお買い得だった以下で購入

一生懸命に交換作業を実施。
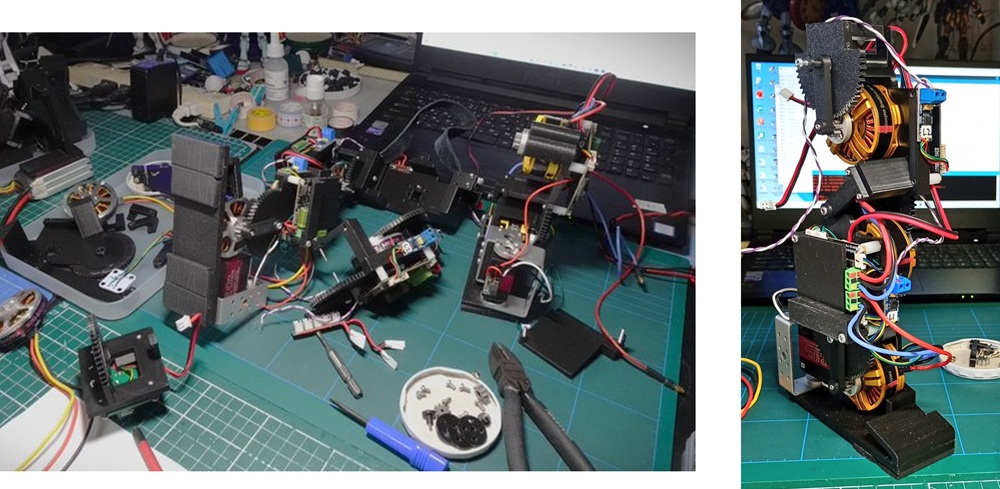
本当に一生懸命にやりました。
つま先
かかとのYaw軸は足底面板をシフトする機構となっていました。
かかとシステム
うまくいくかどうか pic.twitter.com/84D3LjY669— HomeMadeGarbage (@H0meMadeGarbage) August 11, 2025
ちょっと味気なかったので、つま先を底面に移植しました。
足の底面のみシフトだと温かみが感じられなかったので
つま先を移植 pic.twitter.com/t21AENSBQb— HomeMadeGarbage (@H0meMadeGarbage) August 19, 2025
足間隔幅詰め
足首と股関節モータを BE4108 380KV に交換できました。
従来の5010 360KVに比べて380KVと高速なので足踏みの応答も早くていい感じです。
モータ全交換
応答よくなった足幅広くなったから少し詰めるか pic.twitter.com/IAgKhanP3t
— HomeMadeGarbage (@H0meMadeGarbage) August 19, 2025
BE4108 に全交換したことで足の間隔幅が広くなったので10mmほど詰めました。
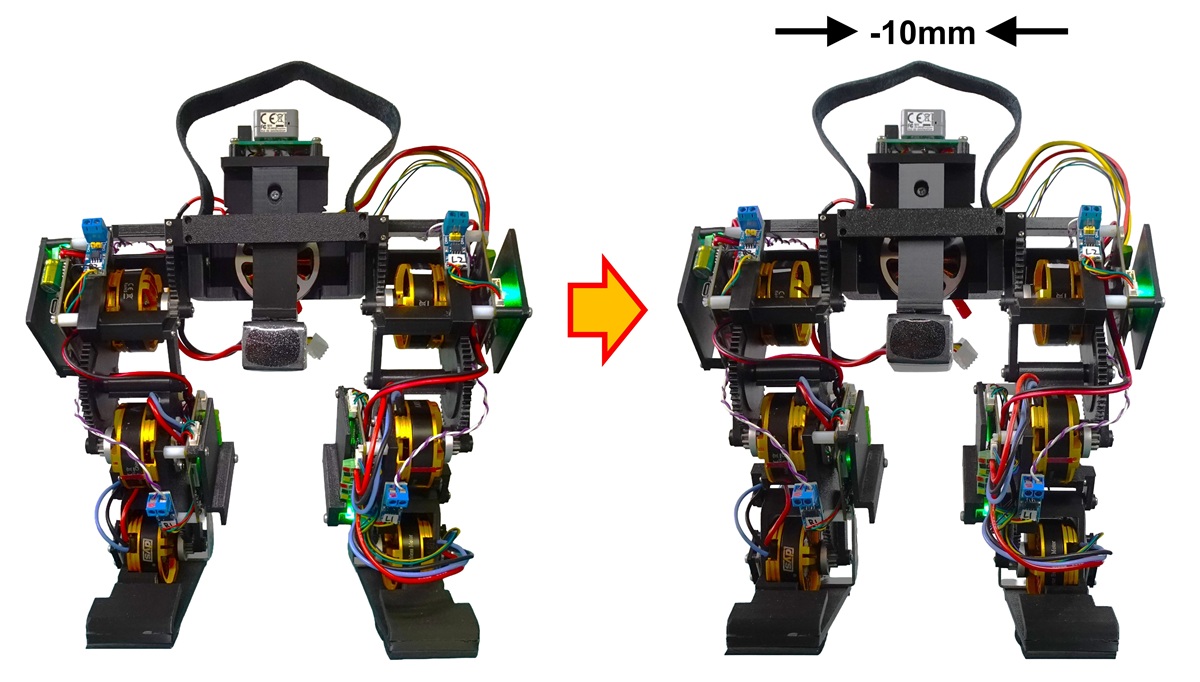
実に元気になりました。
具合がいい#Robotics pic.twitter.com/KcTkfIfBAk
— HomeMadeGarbage (@H0meMadeGarbage) August 21, 2025
動作
モータを全交換して足間隔調整してついに完成しました。
旋回や歩行も元気にできるようになりました。
ドローン用ブラシレスモータによるシリアルリンク 2足歩行ロボットの検証はこのへんで終了かなと
本プロジェクトに着手したのが2025年4月なのでかなり長い期間 検証をしたことになります。
このロボで強化学習に挑戦したり、シリアルリンク機構に加えて股関節の機構も各種味見することでかなり多くの知見を得ることができました。
シリアルリンク 2足歩行ロボット
Serial-link biped robotどの動作が素晴らしいかい?
Which movement is great? pic.twitter.com/RS41YMuiV1— HomeMadeGarbage (@H0meMadeGarbage) August 10, 2025
次はドローン用ブラシレスモータではなくロボット用のモータも触ってみたいなぁと考えております。
やっぱトルク足りないわ。
このロボなんて小さいけど人乗っかってるかんね
ひ人がのってらぁ。。 https://t.co/ig2UFdwuZz pic.twitter.com/Zx9ibrfxB4
— HomeMadeGarbage (@H0meMadeGarbage) June 22, 2025
HomeMadeGarbageがガチモータでロボ作り出したらマジで飛ぶぞ
立ってられないですよ
立ってられたらたいしたもんですよ
誰がこんなたくさんの2足歩行ロボットに囲まれるとおもいますか pic.twitter.com/MELfRim5fN
— HomeMadeGarbage (@H0meMadeGarbage) August 22, 2025