
電子工作
懲りずに まぁた 倒立振子 作ってるぞコイツ
私は定期的に倒立振子を作る人間です。 https://homemadegarbage.com/bala27/ 足のないシンプルな車輪倒立振子で坂道でも機体水平を保てないか以後もいろいろ試したのだけど 諦めました。 坂道を重心シフトなしのモータトルク制御のみで走行は無理だということが分かりました...
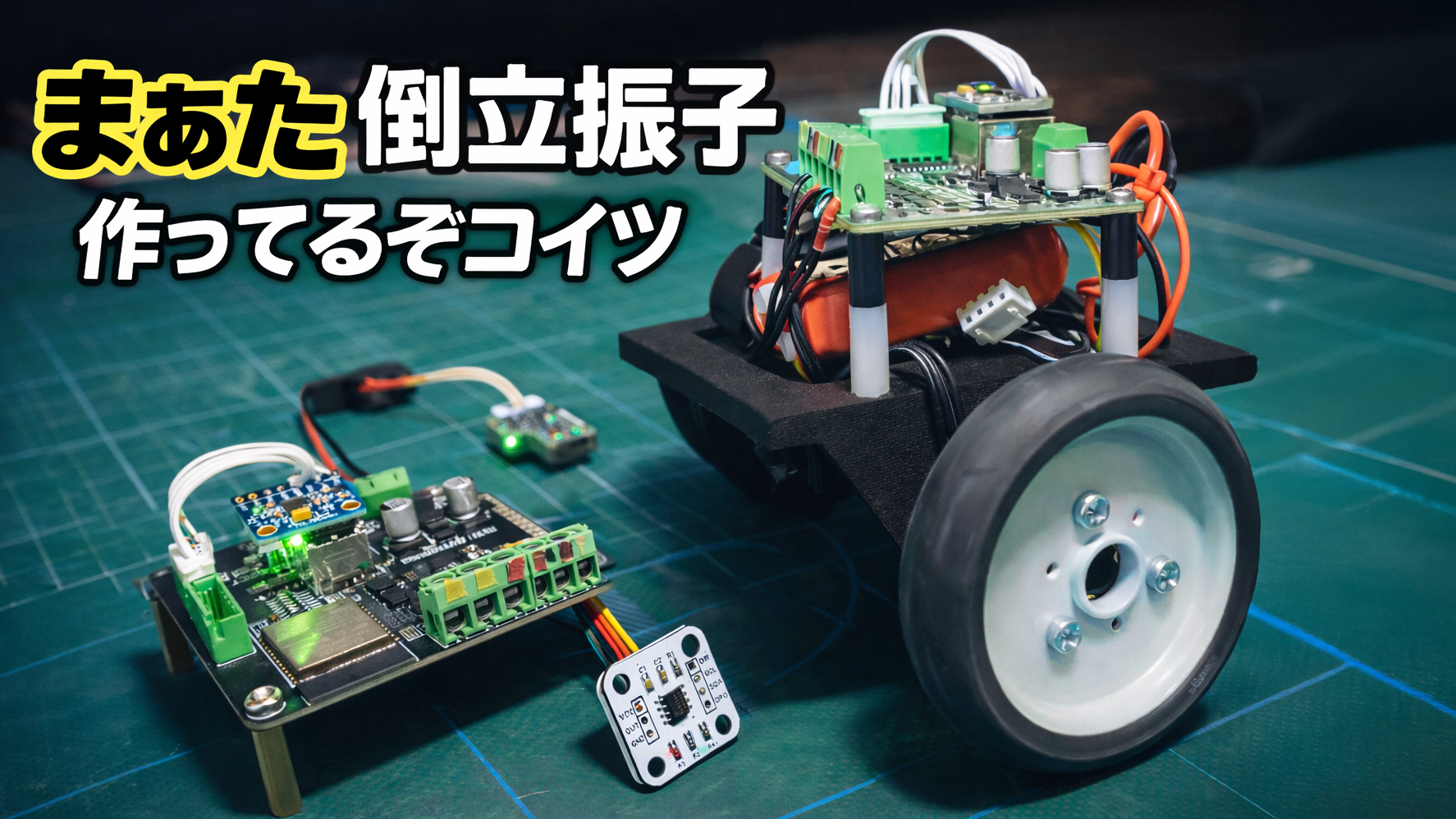
まぁた 倒立振子 作ってるぞコイツ
ちょっと自分の中で課題というか興味がありまして "足のない単純な構造の車輪倒立振子のボディを斜面でどうやって平行に保つのか" 【宿題】 こういう重心移動できない倒立振子 坂道でボディどうやって平行に保つのか pic.twitter.com/AmhS6Qd7oq — HomeMade...

クローラー倒立ボット MorphCrawlerBot
去年 (2025年) 完成させたクローラー倒立ボット MorphCrawlerBot を先日改修して 去年の連載記事に追記という形で記載したのですが、埋もれてもったいないので改めて粒だてたいと思います。 https://homemadegarbage.com/bldcservo10// &nb...
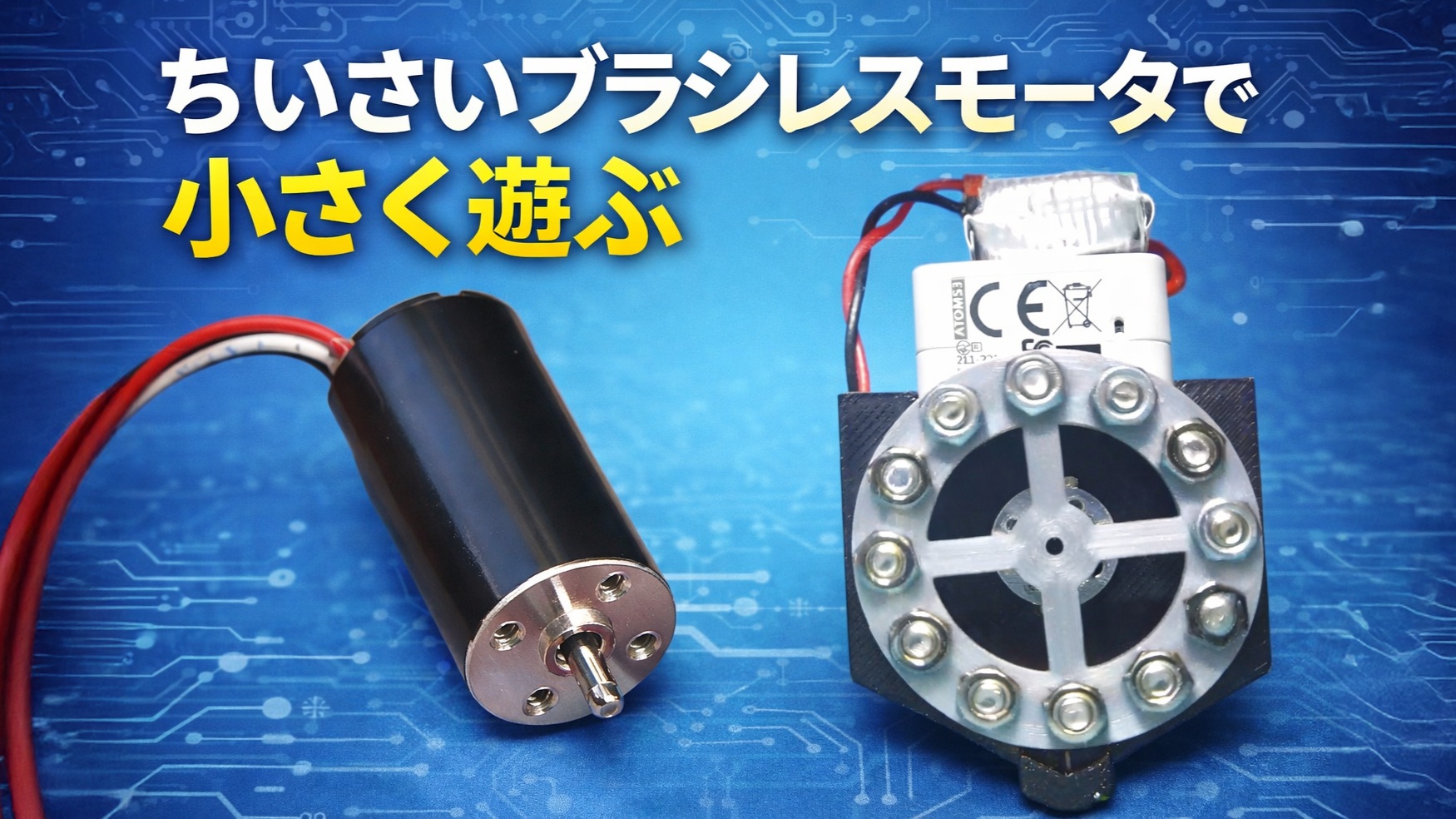
ちいさいブラシレスモータで小さく遊ぶ
今年 (2026年) にはいってから小さいブラシレスモータがAliExpressに出回っているように見受けられる (なんでだろね?ドローンブーム終了とか?)。 個人的にはうれしい。またいいモータに出会って来年 (2027年) の9重倒立実現確度を高めたいのだ。 ↑早速試しに1個 買ってみた...
電子工作 2026.2.8 お父ちゃん ![]()

競技用歩兵ロボットを自分なりに味見
またオモシロをインターネットでみつけた Make it bigger and put a 9mm submachine gun with low recoil on it. pic.twitter.com/5JcwZ9LSkZ — Zhao DaShuai 东北进修🇨🇳 (@zhao...

2足歩行ロボット HM-01 の強化学習3
以前実施した自作2足歩行ロボ HM-01の強化学習について改めて考えてみました。 https://homemadegarbage.com/rl09/ ロボットの強化学習による動作生成は今や当たり前のように実用され、フレームワークも進化し整ってきているように感じます。 GPU...
電子工作 2026.1.30 お父ちゃん ![]()
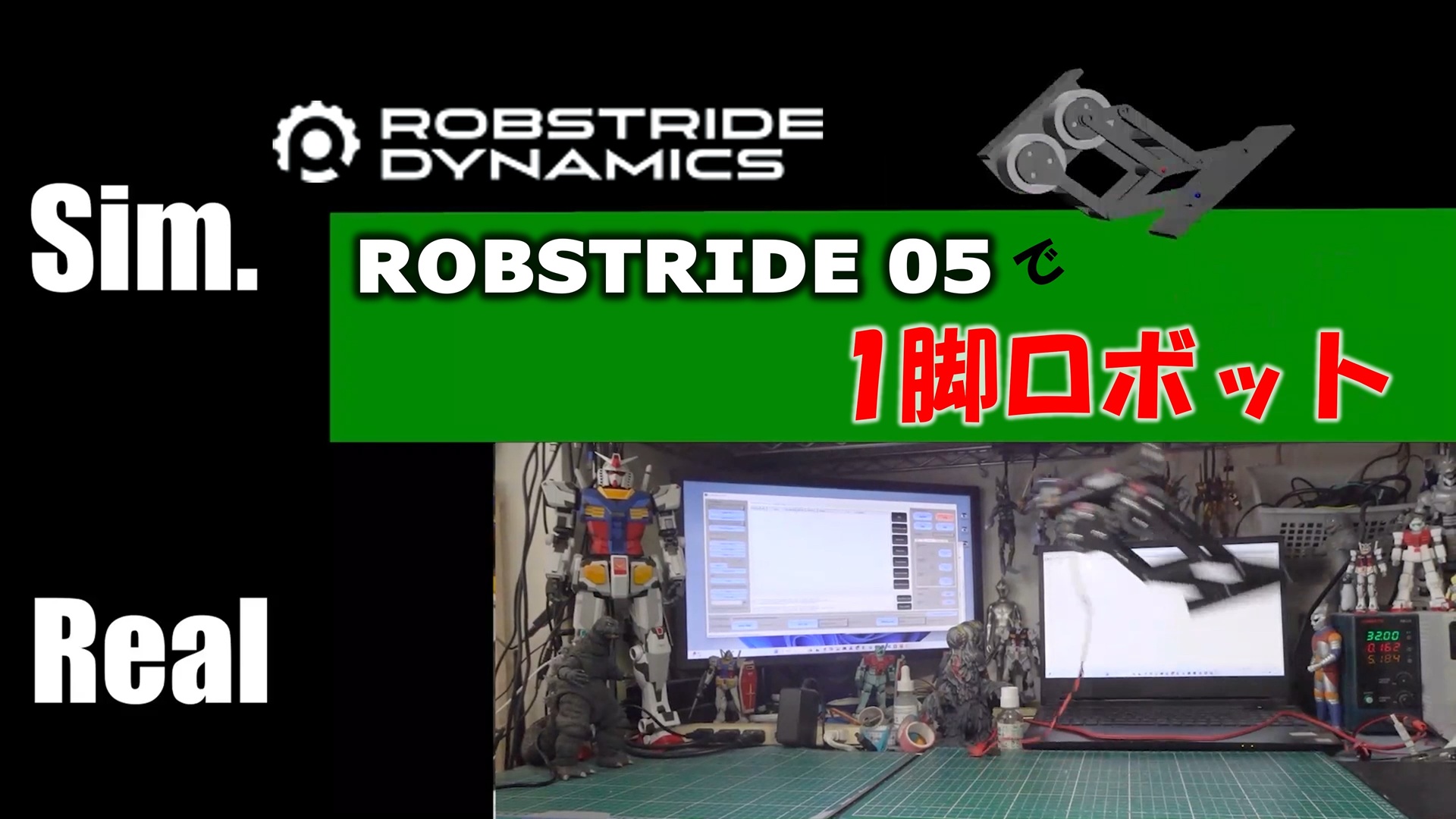
ROBSTRIDE 05 で1脚ロボット
以前 2個のRobStride 05 で1脚ロボを製作しました。 https://homemadegarbage.com/robstride04 ここではこの1脚ロボの動作を掘り下げてみました。 https://t.co/1KsNoXiFGT pic.twitter.com...
電子工作 2026.1.26 お父ちゃん ![]()

Control Moment Gyroscopes: CMG について考える
またネットで凄いものをみつける Rollo Robotics社の試作ロボらしい これピッチ角はわかるんだけど ロール軸はどうやって制御してるんだ? おもり?? 記事によると "gyroscopic stabilization technology" と記載があるのでジャイロの可能性もあ...
電子工作 2026.1.23 お父ちゃん ![]()


ついに達成!!! 8重倒立への道4
前回はSHISEIGYO-1の筐体を新造して、7重倒立の検討を実施しました。 https://homemadegarbage.com/reactionwheel78// ここでは安定的7重倒立を実現させて、ついに8重倒立に挑戦します。 8台のモジュール 今...
電子工作 2026.1.18 お父ちゃん ![]()




古 倒立振子を復活させる
今年最後の電子工作として、発掘された古の倒立振子を復活させることにしました。 6年以上前につくったヴィンテージ https://homemadegarbage.com/bala03/ これを令和の感覚で作り直してみます。 古 倒立振子 古 倒立振子の...

ROBSTRIDE 05 を買い足してみた
QDDモータ ROBSTRIDE 05を買い足しました。 今回はモータの詳細も理解するべくUSB-CANモジュールとのセットで購入いたしました。 2個の ROBSTRIDE 05での製作を楽しみつつ更に詳細調査実施しましたので報告させてください。 ...
電子工作 2025.12.24 お父ちゃん ![]()