ロボティクス
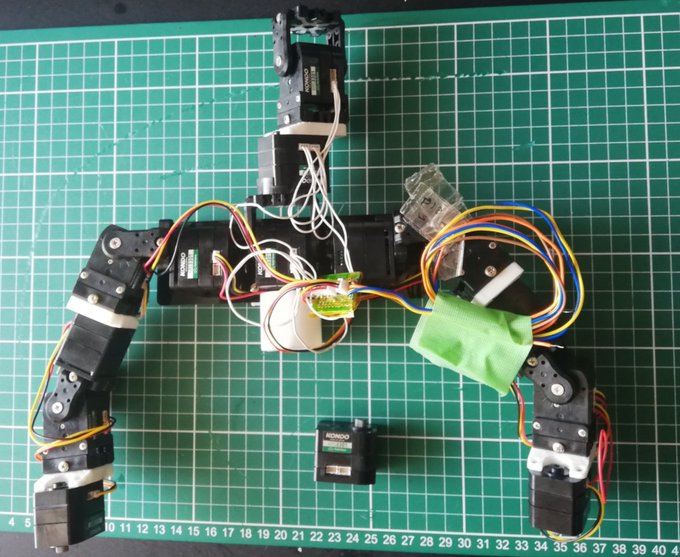
足を逆運動学で制御 -シリアルサーボと距離を詰めたい俺5-
前回はシリアルサーボ (KRS3301)を用いて製作した足で足踏み動作を実現しました。。 https://homemadegarbage.com/krs04// [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-330...
電子工作 2022.1.10 お父ちゃん ![]()

シリアルサーボで足踏み -シリアルサーボと距離を詰めたい俺4-
前回はシリアルサーボ (KRS3301)を用いて足を製作しました。 https://homemadegarbage.com/krs03/ [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-3301 IC...
電子工作 2022.1.8 お父ちゃん ![]()
シリアルサーボで足製作 -シリアルサーボと距離を詰めたい俺3-
前回はシリアルサーボ (KRS3301)を用いてロボットアームを製作しました。 https://homemadegarbage.com/krs02/ [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-3301 ICS"...
電子工作 2022.1.7 お父ちゃん ![]()
シリアルサーボでロボットアーム -シリアルサーボと距離を詰めたい俺2-
憧れのシリアルサーボ (近藤科学 KRS-3301) を入手し、前回はじめて動作させました。 https://homemadegarbage.com/krs01 ここではシリアルサーボでロボットアームを製作しましたので報告いたします。 ロボットアーム 前回の連動...
はじめてのシリアルサーボ -シリアルサーボと距離を詰めたい俺1-
以前から憧れを抱きつつもなかなか手が出せなかったシリアルサーボ。 でべさんから譲っていただき、やっと触れることができました。 良いサーボを入手 まず私とこのサーボとの距離をつめないといけませんね。 https://t.co/ucGfDetipq pic.twitter.com/n7fd7C...
電子工作 2021.12.30 お父ちゃん ![]()

33日後に2足歩行ロボットを完成させたい俺
HomeMadeGarbage Advent Calendar 2021 |24日目 これまで2軸の姿勢制御モジュール SHISEIGYO-2を用いて、特殊球体ホイール バランスロボットや一脚 屈伸ロボを製作してまいりました。 pic.twitter.com/fxIaYfvHsH — ...
Advent Calendar / 電子工作 2021.12.24 お父ちゃん ![]()
モーションコントローラ検討3 ー二足歩行ロボットへの道8ー
前回はAIカメラHuskyLensを用いて画像認識でロボットを遠隔操作する可能性を確かめました。 https://homemadegarbage.com/robo07// ここではコントローラによる操作に戻ってモーション検討実施いたしました。 歩行動作 歩行動作をスムーズ...
電子工作 2021.7.28 お父ちゃん ![]()
HuskyLens で ロボットを遠隔操作 ー二足歩行ロボットへの道7ー
前回はコントローラで二足歩行ロボットの全身を遠隔操作し、モーションの記録・再生を可能としました。 https://homemadegarbage.com/robo06#REC%EF%BC%86PLAY%E6%A9%9F%E8%83%BD ここでは、少し寄り道をしてAIカメラ Hu...
電子工作 2021.7.19 お父ちゃん ![]()

モーションコントローラ REC & PLAY ー二足歩行ロボットへの道6ー
前回はオリジナルのコントローラを製作してESP-Nowでの同期制御で全身動作を確認しました。 https://homemadegarbage.com/robo05#%E3%82%B3%E3%83%B3%E3%83%88%E3%83%AD%E3%83%BC%E3%83%A9_%E4%B8%8B%E5...
電子工作 2021.7.18 お父ちゃん ![]()
モーションコントローラ検討2 ー二足歩行ロボットへの道5ー
前回はオリジナルのコントローラを製作してESP-Nowでのロボット上半身同期制御の実現を確認しました。 https://homemadegarbage.com/robo04/ 今回は下半身も追加して全身制御を目指します。 コントローラ 下半身 配線 コントローラの下...
電子工作 2021.7.15 お父ちゃん ![]()

モーションコントローラ検討 ー二足歩行ロボットへの道4ー
前回は二足歩行ロボットをMIDIコントローラで制御して楽しみました。 https://homemadegarbage.com/robo03/ ここでは更にモーション制御方法を検討しましたので報告いたします。 DAWソフトで制御 MIDIコントローラで歩...
電子工作 2021.7.10 お父ちゃん ![]()
MIDIコントローラでモーション制御 ー二足歩行ロボットへの道3ー
前回は書籍を参考に各種モーションを楽しみました。 [amazonjs asin="4777521095" locale="JP" title="予算1万円でつくる二足歩行ロボット (I/O BOOKS)"] https://homemadegarbage.com/robo02 各モーションは凄...
電子工作 2021.6.23 お父ちゃん ![]()
各種モーションを堪能 ー二足歩行ロボットへの道2ー
前回は書籍を参考に二足歩行ロボットを製作いたしました。 [amazonjs asin="4777521095" locale="JP" title="予算1万円でつくる二足歩行ロボット (I/O BOOKS)"] ここでは各種モーションを試しましたので報告させていただきます。 ...
電子工作 2021.6.20 お父ちゃん ![]()
二足歩行ロボットへの道 爆誕 ー二足歩行ロボットへの道1ー
前々から二足歩行ロボットを作りたいと思っていたのですが、 何から手をつけてよいか分からず 低価格で販売されたロボットを買うチャンスも逃し 途方に暮れていました。。 現状の私のスキルは… 予算尽きて足しかできなかった。。。#ロボット製作 #Blynk pic.twitter.com/rC...
電子工作 2021.6.18 お父ちゃん ![]()
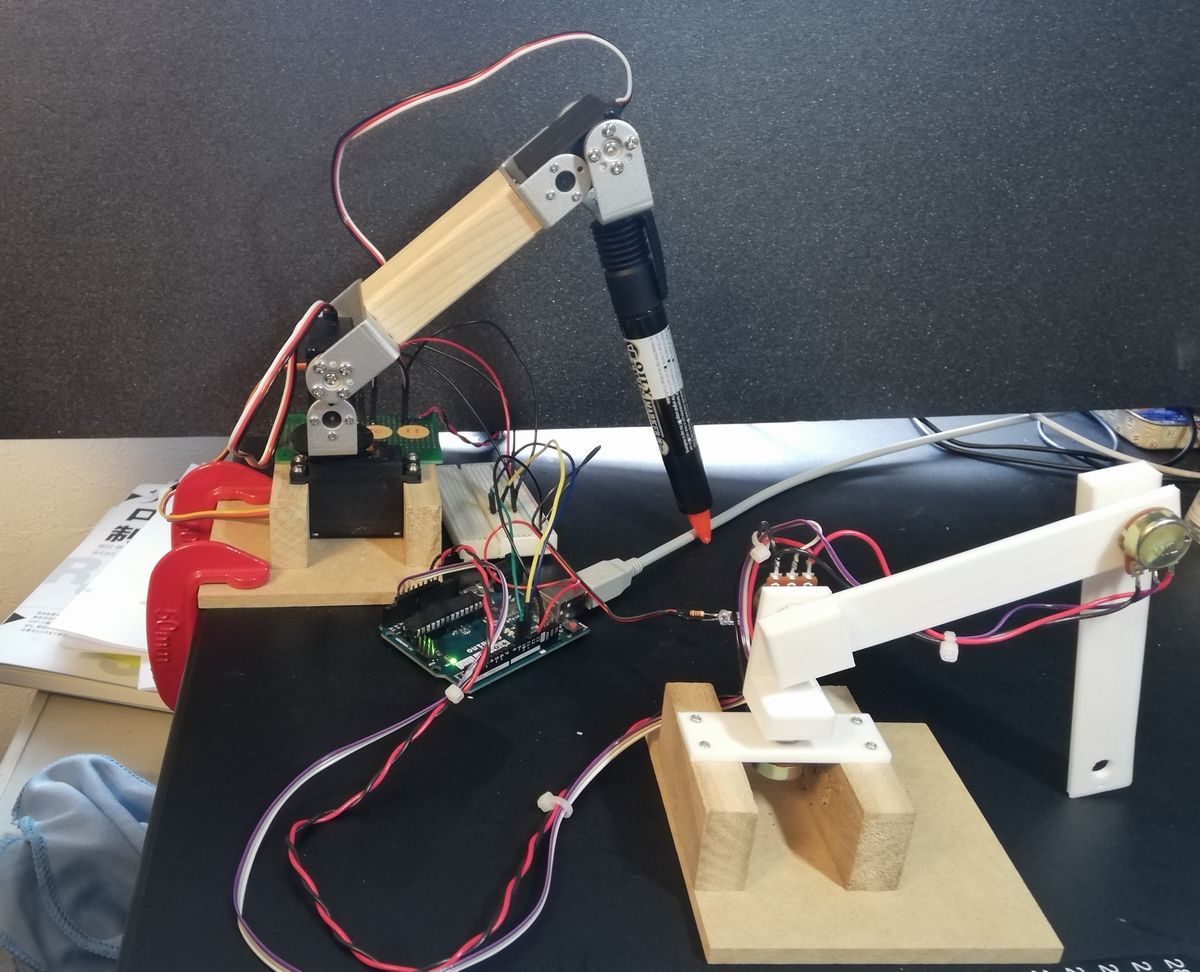
自作コントローラで制御 ーロボットアーム自作への道5ー
Arduino Advent Calendar 2019 | 19日目 さてここまでは主に逆運動学によってロボットアームを制御してきましたが、やっぱり物理コントローラでグリグリしたくなるのが摂理。 ロボットアームを2対用意して、一方を手で動かして他方が追従するみたいのがやりたかったのですが、 ...
Advent Calendar / ロボットアーム / 電子工作 2019.12.19 お父ちゃん ![]()