Arduino
二足歩行ロボットへの道 爆誕 ー二足歩行ロボットへの道1ー
前々から二足歩行ロボットを作りたいと思っていたのですが、 何から手をつけてよいか分からず 低価格で販売されたロボットを買うチャンスも逃し 途方に暮れていました。。 現状の私のスキルは… 予算尽きて足しかできなかった。。。#ロボット製作 #Blynk pic.twitter.com/rC...
電子工作 2021.6.18 お父ちゃん ![]()
SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
私が姿勢制御モジュールの研究を開始して、もうすぐ1年が経とうとしています。 多くの学びと成果を得たのですが、このたびもう一歩前進することができました。 姿勢制御モジュールはあくまで"モジュール" 何かの構成要素の一つとして活用してこそであると常々考えておりました。 今回、1例となる活用実験が...
電子工作 2021.6.15 お父ちゃん ![]()

Open-SmartWatch を Arduino IDE でカスタマイズ しかし 技適未取得
いつもお世話になっているMakerfabs様にてOpen-SmartWatchを購入しました。 [bc url="https://www.makerfabs.com/open-smartwatch.html"] いろいろいじりましたので報告させていただきます。 技...
電子工作 2021.6.10 お父ちゃん ![]()
SHISEIGYO-3 eternal 改良 ーリアクションホイールへの道38ー
以前、電源を入れると点倒立するまで自律的に パラメータ調整しつつ動き続けるシステム"SHISEIGYO-3 eternal"を構築しました。 https://homemadegarbage.com/reactionwheel35 ここではSHISEIGYO-3 eternalに改良を施しましたの...
電子工作 2021.6.8 お父ちゃん ![]()
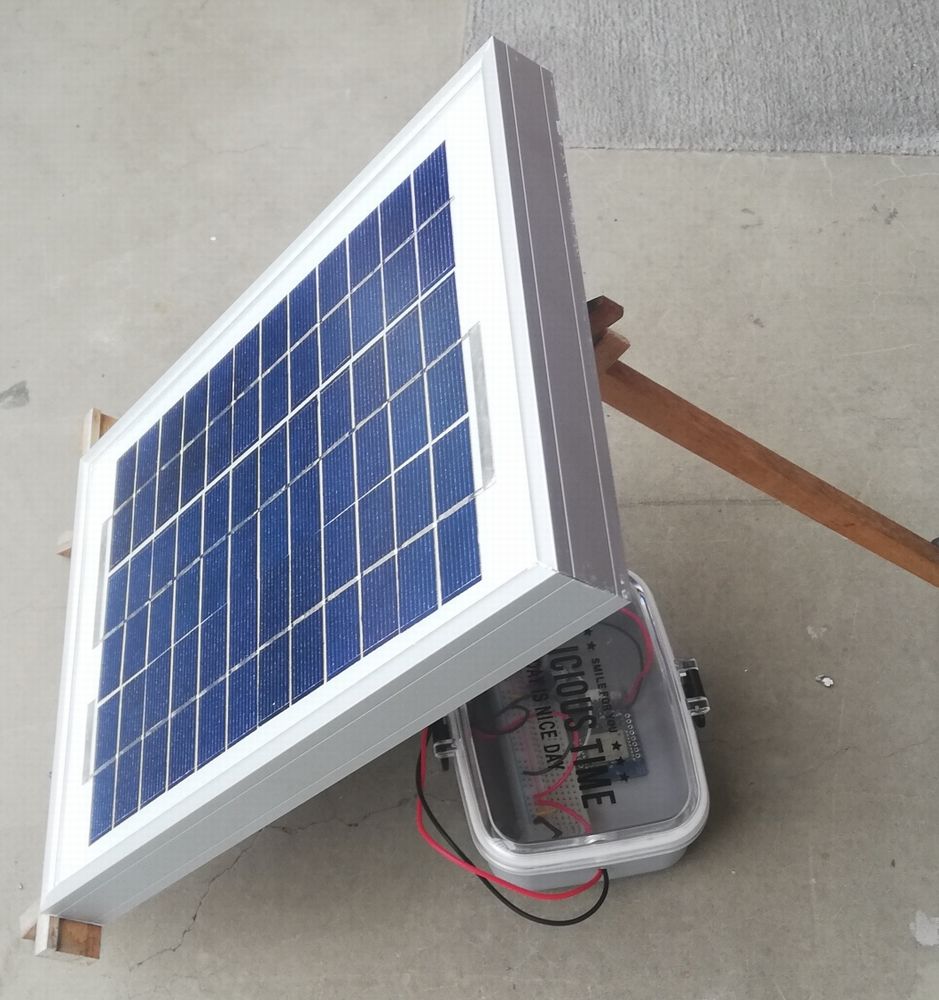
5W ソーラーパネルと ESPマイコン でバッテリーレス ロガー製作
前回はSPRESENSEにソーラパネルを直結してロガー動作を楽しみました。 https://homemadegarbage.com/solarspresense02/ SPRESENSEの低消費動作によって日中のソーラー駆動を確認でき、データはSDカードに保存しました。 しかし、データ取得にい...
SHISEIGYO-1 を改良 APモードでパラメータ調整 ーリアクションホイールへの道37ー
以下で1軸 姿勢制御モジュール SHISEIGYO-1の製作例をまとめたレシピを販売しております。 https://shop.homemadegarbage.com/product/shiseigyo-1_recipe/ 上記レシピのサンプルコードでは各種パラメータをコードに書き込んでいるため、...
電子工作 2021.5.18 お父ちゃん ![]()
ハムスター用 回し車カウンター製作
HomeMadeGarbageに新たなメンバーが増えました! ゴールデンハムスターの「もち」ちゃんです(*´ω`*) かわいい 回転はホール素子で検出とか 4つ角にロードセルで動向検出とか 夢広がる pic.twitter.com/4Fy4eJu4C5 — HomeMadeGar...
電子工作 2021.5.7 お父ちゃん ![]()

5W ソーラーパネルと SPRESENSE でバッテリーレス ロガー製作
前回は100均のガーデンライトのソーラーパネルを用いてバッテリーレス データロガーを製作しました。 https://homemadegarbage.com/solarspresense// しかしソーラーの出力がさほど大きくなく曇り時や少しでもソーラーに影がかかると動かなくなってしまうため、長時...

100均のソーラーパネルと SPRESENSE でバッテリーレス ロガー製作
前回は100均のソーラーパネルで Raspberry Pi Pico を駆動してみました。 https://homemadegarbage.com/solarpico このときSPRESENSE も動かしてみて報告しています。 ここではSPRESENSE でロガーを製作してみましたので報告させ...
SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
2軸の姿勢制御モジュール SHISEIGYO-2のM5Stack CORE2用アプリを改良いたしました。 上の動画のように各制御パラメータをタッチパネルで変更できるようにしました。 調整した変数はメモリに保存され電源OFF後も保持されます。 コード書き込みや外部からの通信も...
電子工作 2021.4.17 お父ちゃん ![]()
SHISEIGYO-3-eternal 爆誕 ーリアクションホイールへの道35ー
電源を入れると点倒立するまで自律的に パラメータ調整しつつ動き続けるシステムを確立いたしました。 名付けて "SHISEIGYO-3-eternal " です。 動作は見ていただいた通りなのですが、ここでは開発の流れを紹介させていただきます。 筐...
電子工作 2021.4.7 お父ちゃん ![]()

3軸 姿勢制御モジュール SHISEIGYO-3 基板製作 ーリアクションホイールへの道34ー
前回は3軸 姿勢制御モジュール SHISEIGYO-3に起き上がりボタンの追加などの改良を加えました。 https://homemadegarbage.com/reactionwheel32 今回はSHISEIGYO-3の制御基板を製作したので報告させていただきます。 ...
電子工作 2021.2.13 お父ちゃん ![]()

姿勢制御検討2 ードローンへの道3ー
前回から随分時間がかかってしまいましたが、これまでの進捗報告をさせていただきます。 https://homemadegarbage.com/drone02/ 姿勢制御検討 前回に引き続きホバリングの実現を目指して、姿勢制御の検討を実施していました。 基本的には前回と同じコード...
1軸 姿勢制御モジュール SHISEIGYO-1 バッテリ内蔵検討 ーリアクションホイールへの道33ー
以前製作した 1軸 姿勢制御モジュール SHISEIGYO-1 につきましてバッテリ内蔵化を検討しましたのでご報告します。 https://shop.homemadegarbage.com/product/shiseigyo-1_recipe/ バッテリ内蔵 従来...
電子工作 2021.2.8 お父ちゃん ![]()
3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
前回、完成を報告させていただいた3軸 姿勢制御モジュール SHISEIGYO-3に改良を施しましたので報告させていただきます。 https://homemadegarbage.com/reactionwheel29 ESP32評価ボード変更 これまではAmazon...
電子工作 2021.1.29 お父ちゃん ![]()