
Arduino
2023年 SPRESENSE活用コンテスト への道⑪ ー屈伸型倒立振子ー
前回はSPRESENSEによる倒立振子を製作し動作確認しました。 https://homemadegarbage.com/spresense23-10// 屈伸型倒立振子製作 前回製作した倒立振子に更にシリアルサーボ STS3032を追加して屈伸型倒立振子を製作しま...
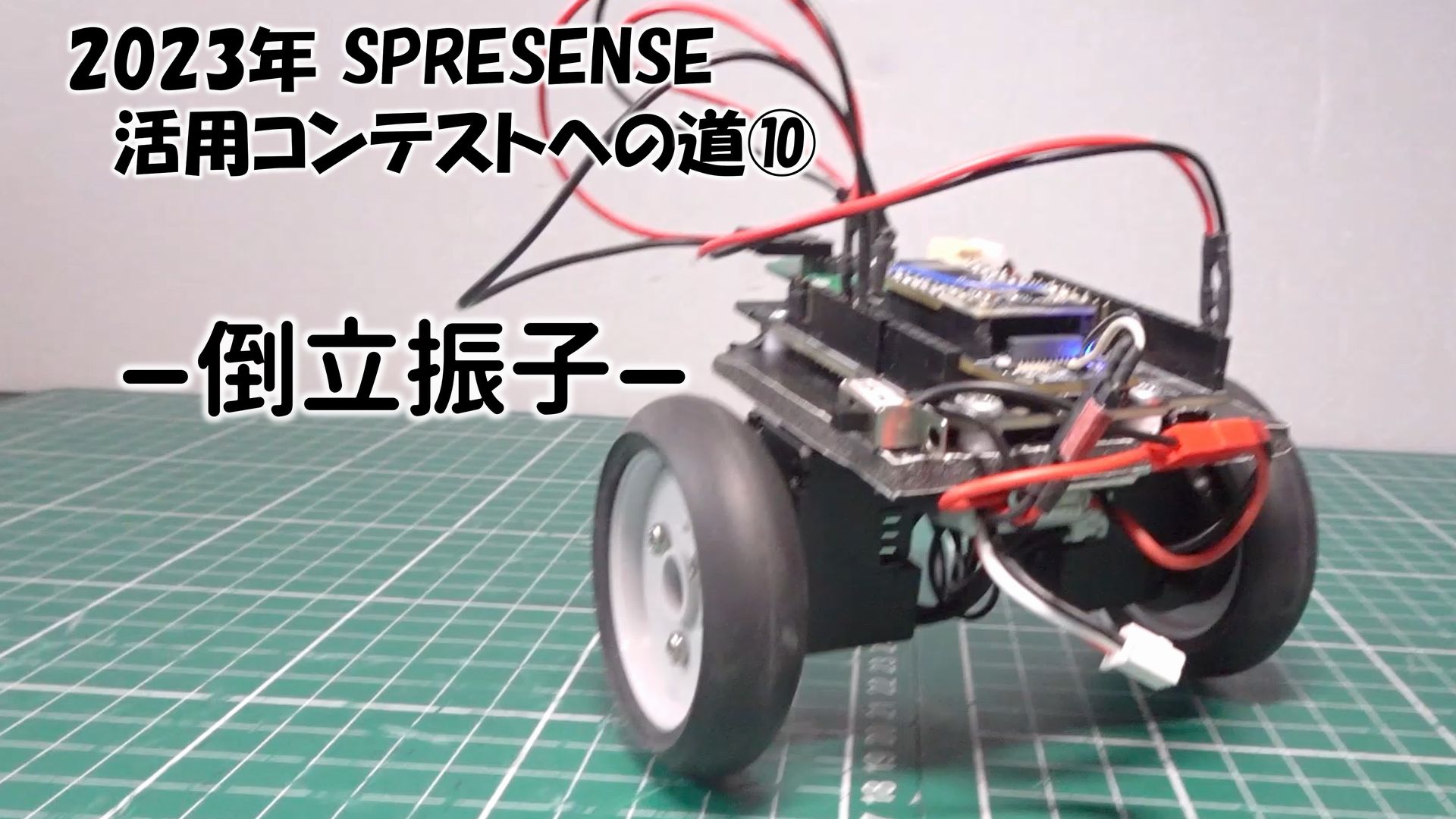
2023年 SPRESENSE活用コンテスト への道⑩ ー倒立振子ー
前回はBLEボード BLE1507 をソフトウェアシリアル通信対応させてシリアルサーボ XL330とのSPRESENSEによる併用を確認しました。 https://homemadegarbage.com/spresense23-9/ 倒立振子製作 BLEボードとサ...

2023年 SPRESENSE活用コンテスト への道⑨ ーBLE通信4ー
前回は9軸Addon ボードのIMUセンサ BMI270 を用いてSPRESENSE傾斜計を実現しロボット犬の姿勢制御を楽しみました。 https://homemadegarbage.com/spresense23-8/ BLEボードとXL330の併用 本道シリー...
電子工作 2023.12.28 お父ちゃん ![]()
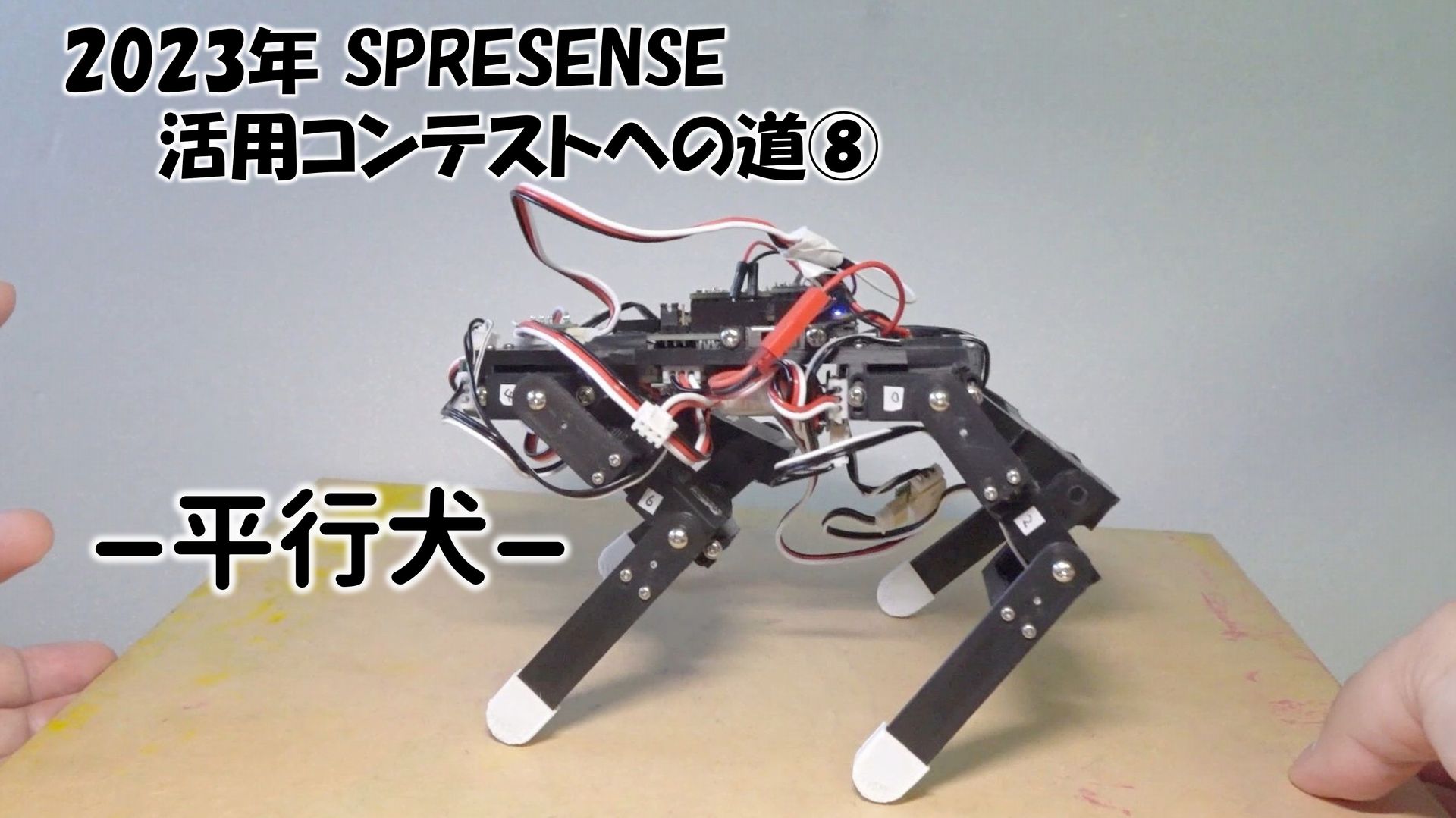
2023年 SPRESENSE活用コンテスト への道⑧ ー平行犬ー
HomeMadeGarbage Advent Calendar 2023 |24日目 前回は 2023年 SPRESENSE活用コンテスト への応募に向けてBLE通信でサーボモータSTS3032ロボット犬の各種制御を楽しみました。 https://homemadegarbage.com/spre...
Advent Calendar / 電子工作 2023.12.24 お父ちゃん ![]()
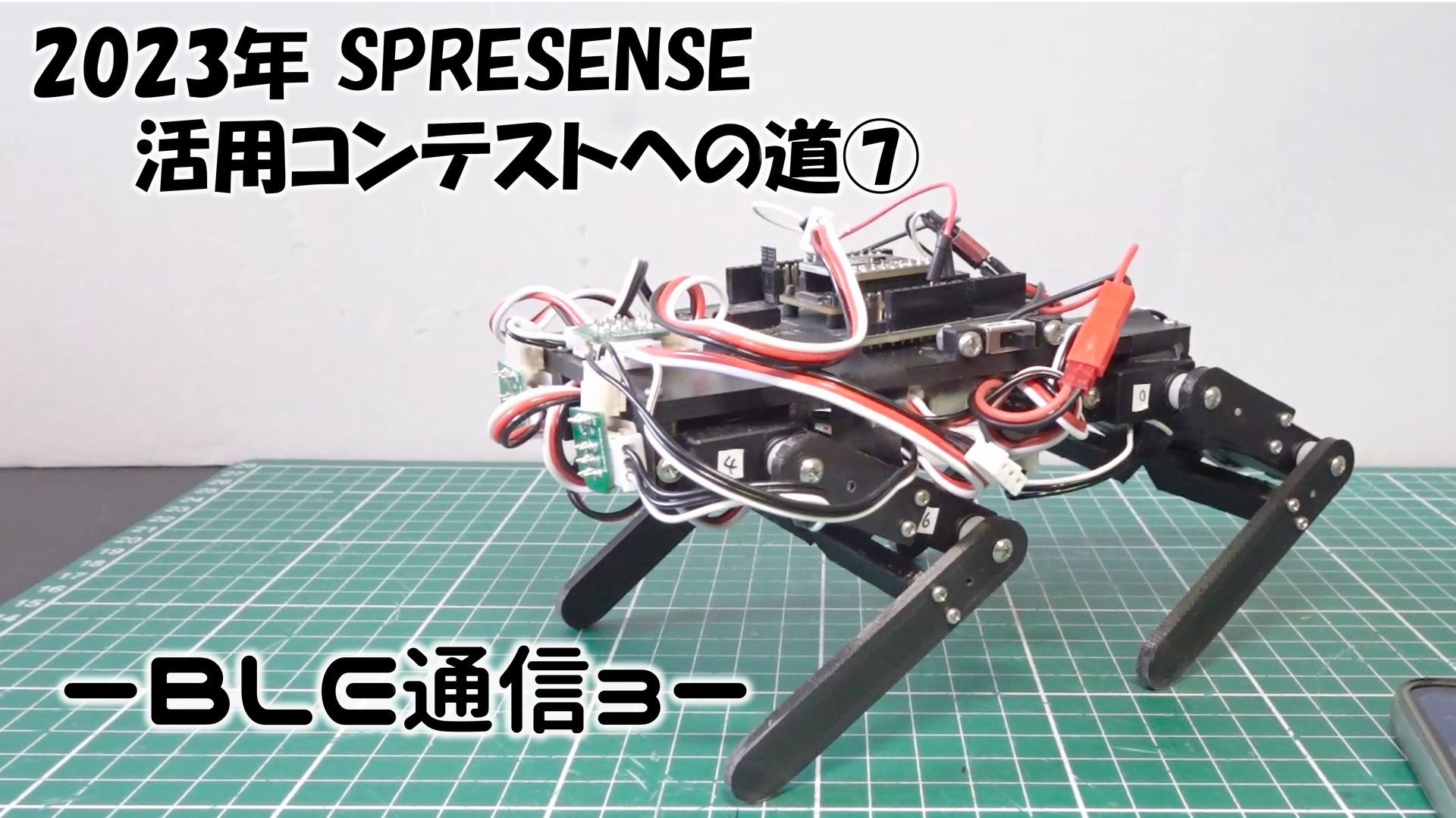
2023年 SPRESENSE活用コンテスト への道⑦ ーBLE通信3ー
HomeMadeGarbage Advent Calendar 2023 |20日目 前回は 2023年 SPRESENSE活用コンテスト への応募に向けてサーボモータSTS3032でロボット犬を構成してSPRESENSEのマルチコア機能を使って動作を確認しました。 https://homema...
Advent Calendar / 電子工作 2023.12.20 お父ちゃん ![]()
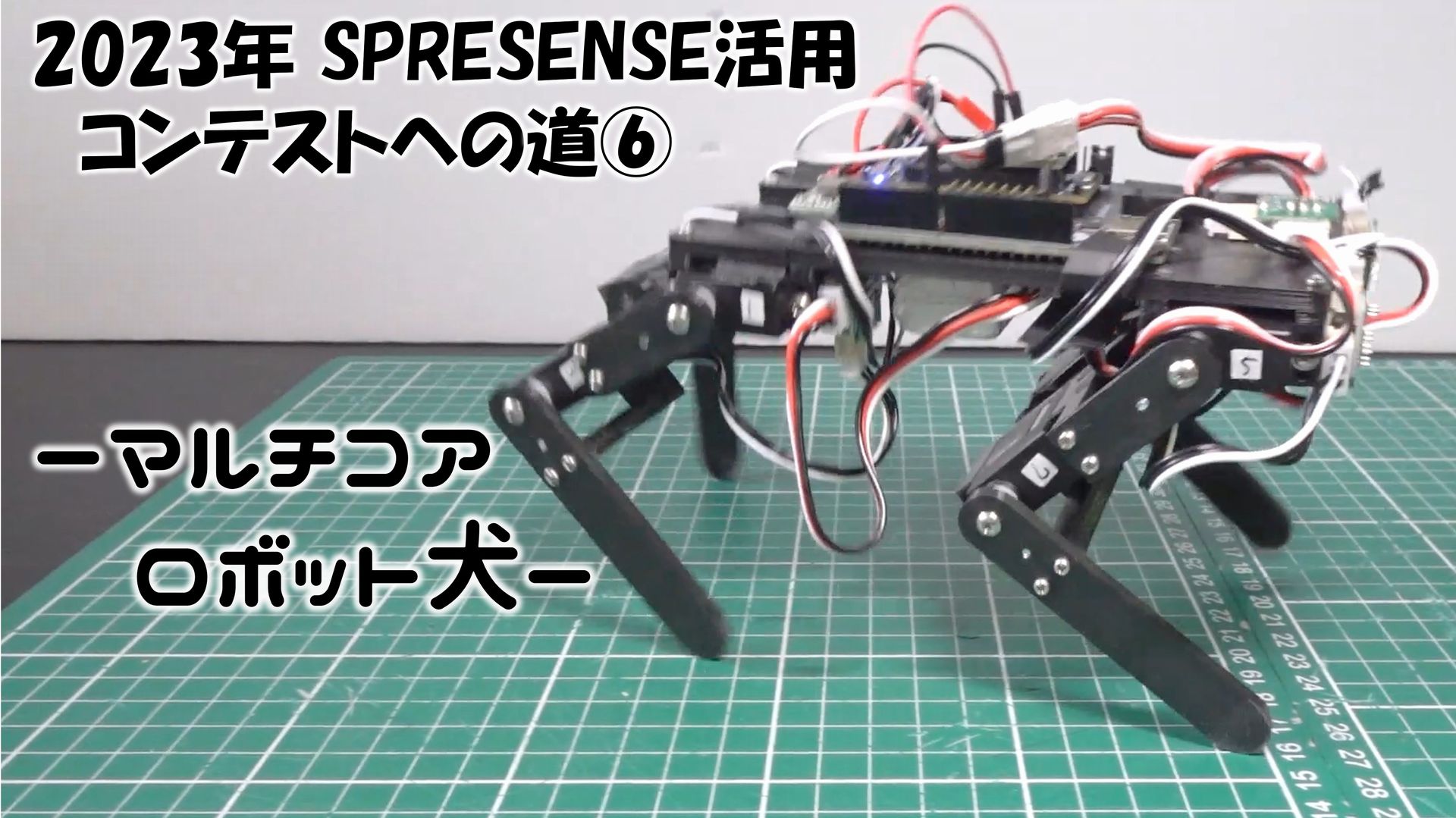
2023年 SPRESENSE活用コンテスト への道⑥ ーマルチコア ロボット犬ー
HomeMadeGarbage Advent Calendar 2023 |16日目 前回は 2023年 SPRESENSE活用コンテスト への応募に向けてサーボモータSTS3032でロボット犬を構成して動作を確認しました。 https://homemadegarbage.com/spresen...
Advent Calendar / 電子工作 2023.12.16 お父ちゃん ![]()
2023年 SPRESENSE活用コンテスト への道⑤ ーロボット犬ー
HomeMadeGarbage Advent Calendar 2023 |14日目 前回は 2023年 SPRESENSE活用コンテスト への応募用に提供いただいたBLEボード BLE1507 を用いてサーボモータのBLE通信遠隔操作を実施しました。 https://homemadegarba...
Advent Calendar / 電子工作 2023.12.14 お父ちゃん ![]()

2023年 SPRESENSE活用コンテスト への道④ ーBLE通信2ー
HomeMadeGarbage Advent Calendar 2023 |12日目 前回は 2023年 SPRESENSE活用コンテスト への応募用に各種サンプル部品を提供いただき、BLEボード BLE1507 を用いてスマホとの通信を確認しました。 https://homemadegarba...
Advent Calendar / 電子工作 2023.12.12 お父ちゃん ![]()
2023年 SPRESENSE活用コンテスト への道③ ーBLE通信ー
HomeMadeGarbage Advent Calendar 2023 |10日目 2023年 SPRESENSE活用コンテスト への応募に向けて前回はマルチコアでの2種のサーボモータ制御を楽しみました。 https://homemadegarbage.com/spresense23-2 サ...
Advent Calendar / 電子工作 2023.12.10 お父ちゃん ![]()
2023年 SPRESENSE活用コンテスト への道② ーマルチコアー
HomeMadeGarbage Advent Calendar 2023 |4日目 2023年 SPRESENSE活用コンテスト への応募に向けて前回は本連載を開始しました。 https://homemadegarbage.com/spresense23-1 シリ...
Advent Calendar / 電子工作 2023.12.4 お父ちゃん ![]()
2023年 SPRESENSE活用コンテスト への道① ーキックオフー
HomeMadeGarbage Advent Calendar 2023 |2日目 去年も参加したSPRESENSE活用コンテスト に今年も参加予定です。 [bc url="https://elchika.com/promotion/spresense2023/#nav"] 今...
Advent Calendar / 電子工作 2023.12.2 お父ちゃん ![]()

二足歩行ロボット SHISEIGYO-1 Walker 再考
先日、以前製作した二足歩行ロボット SHISEIGYO-1 Walker の動画をみてたら新鮮にいい動きだなと思いましたよ。 https://twitter.com/H0meMadeGarbage/status/1718142708714524859 https://homemadegarbag...
電子工作 2023.11.7 お父ちゃん ![]()
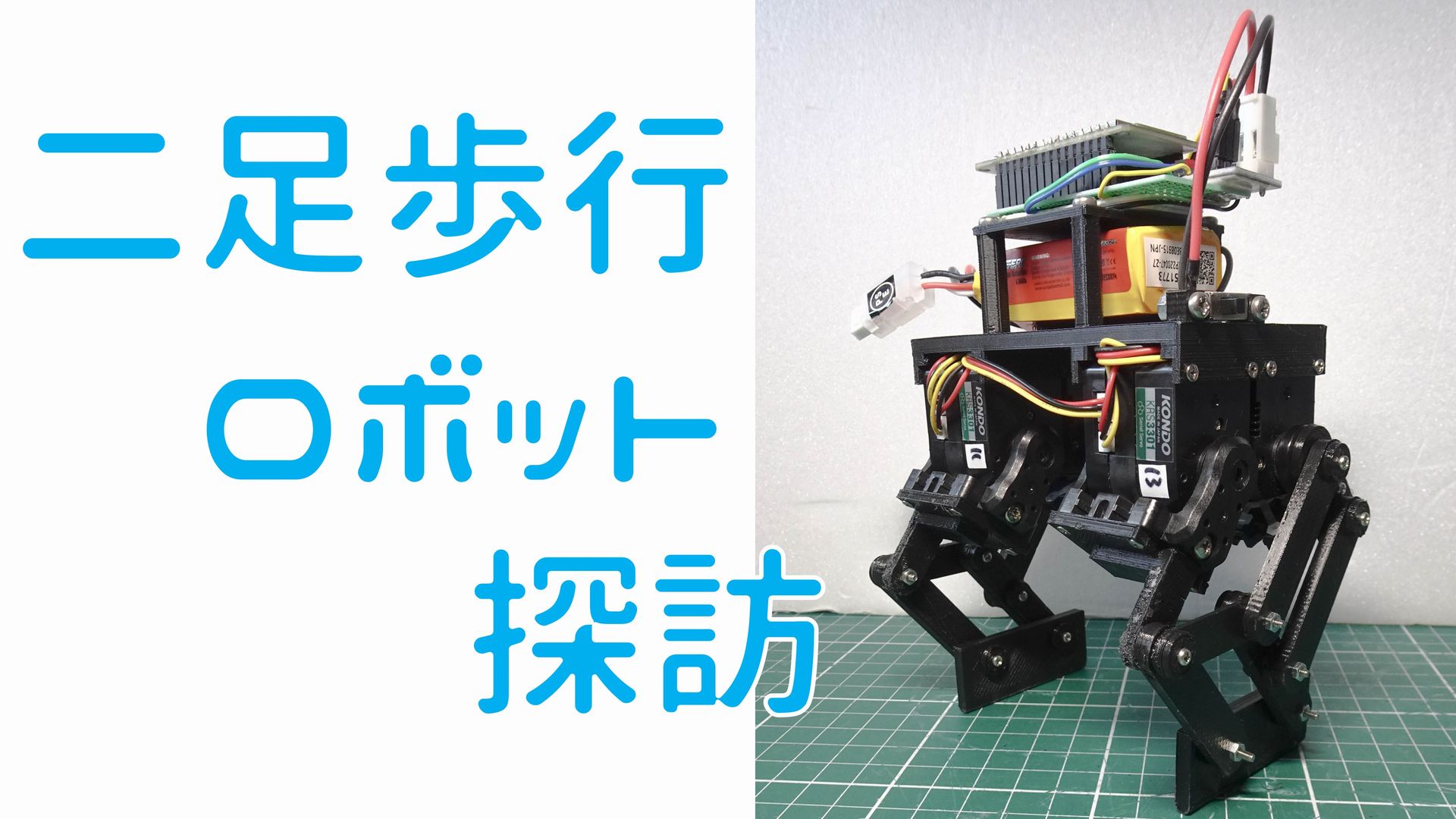
二足歩行ロボット 探訪
X (旧Twitter) にて面白いロボットを目にし、改めて二足歩行ロボットを調査・製作してみたくなりました。 https://twitter.com/H0meMadeGarbage/status/1708976352165298456 考察と方針 コチラのロボッ...
電子工作 2023.10.8 お父ちゃん ![]()

Raspberry Pi Pico W で二足歩行ロボット
以前に Raspberry Pi Pico W を Arduino IDEで開発できるようにして、姿勢制御モジュールを実現しました。 https://homemadegarbage.com/pipicow02 その後に姿勢制御モジュールを応用した二足歩行ロボットを製作しており、ラ...
Raspberry Pi 2023.10.2 お父ちゃん ![]()
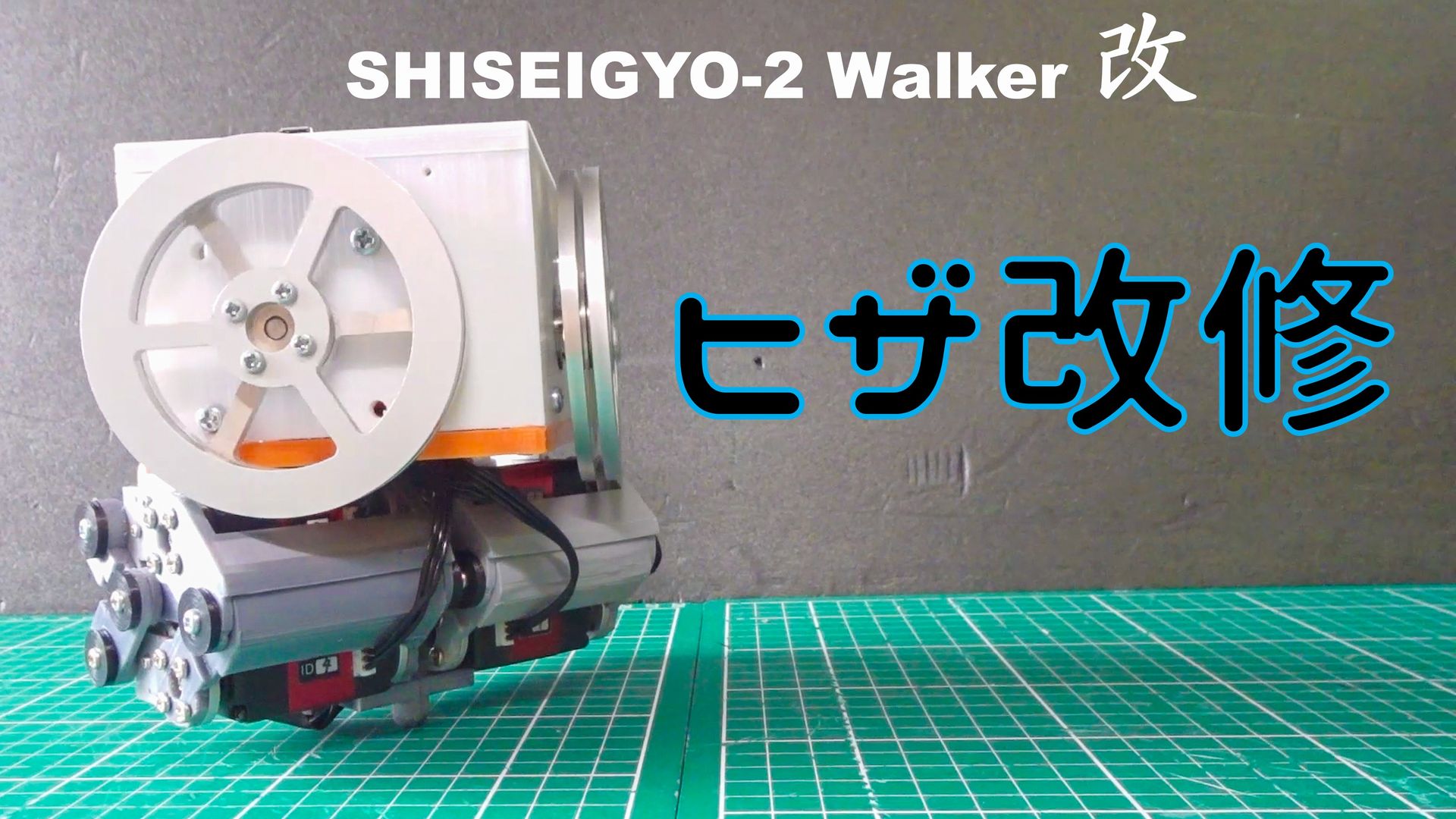
二足歩行ロボット SHISEIGYO-2 Walker 改 のヒザ改修
以前製作した二足歩行ロボット SHISEIGYO-2 Walker 改 ですが、 https://homemadegarbage.com/walker05// 関節がイジっているうちにグニャグニャになり うまく歩けなくなってしまいました。 https://twitter.com/H0me...
電子工作 2023.8.8 お父ちゃん ![]()